






24
Nov
exp(x)在x=0处的偶次泰勒展开式总是正的
By 苏剑林 | 2020-11-24 | 34767位读者 | 引用刚看到一个有意思的结论:
对于任意实数$x$及偶数$n$,总有$\sum\limits_{k=0}^n \frac{x^k}{k!} > 0$,即$e^x$在$x=0$处的偶次泰勒展开式总是正的。
下面我们来看一下这个结论的证明,以及它在寻找softmax替代品中的应用。
证明过程
看上去这是一个很强的结果,证明会不会很复杂?其实证明非常简单,记
\begin{equation}f_n(x) = \sum\limits_{k=0}^n \frac{x^k}{k!}\end{equation}
当$n$是偶数时,我们有$\lim\limits_{x\to\pm\infty} f_n(x)=+\infty$,即整体是开口向上的,所以我们只需要证明它的最小值大于0就行了,又因为它是一个光滑连续的多项式函数,所以最小值点必然是某个极小值点。那么换个角度想,我们只需要证明它所有的极值点(不管是极大还是极小)所对应的函数值都大于0。
1
Dec
Performer:用随机投影将Attention的复杂度线性化
By 苏剑林 | 2020-12-01 | 80951位读者 | 引用Attention机制的$\mathcal{O}(n^2)$复杂度是一个老大难问题了,改变这一复杂度的思路主要有两种:一是走稀疏化的思路,比如我们以往介绍过的Sparse Attention以及Google前几个月搞出来的Big Bird,等等;二是走线性化的思路,这部分工作我们之前总结在《线性Attention的探索:Attention必须有个Softmax吗?》中,读者可以翻看一下。本文则介绍一项新的改进工作Performer,出自Google的文章《Rethinking Attention with Performers》,它的目标相当霸气:通过随机投影,在不损失精度的情况下,将Attention的复杂度线性化。
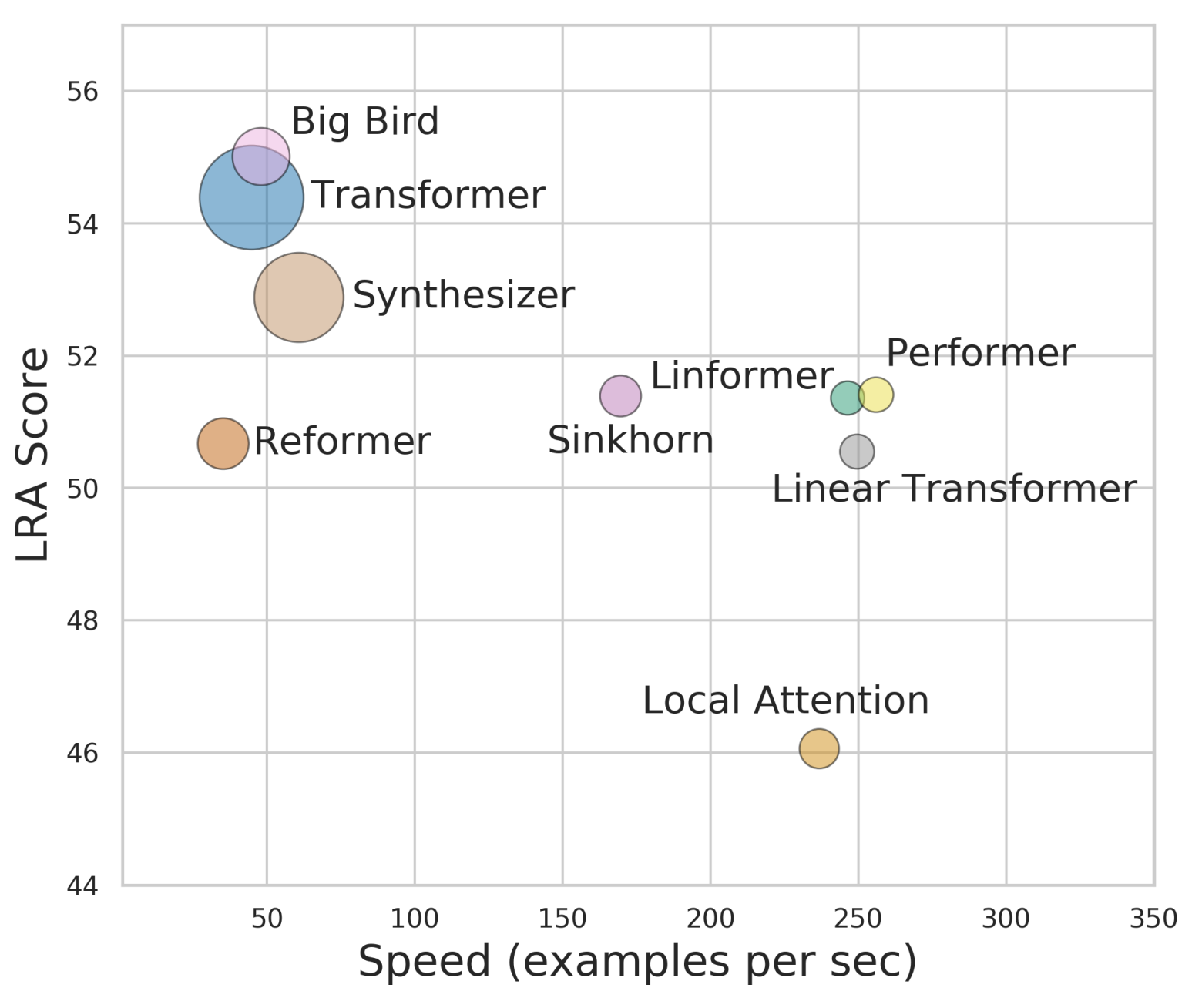
各个Transformer模型的“效果-速度-显存”图,纵轴是效果,横轴是速度,圆圈的大小代表所需要的显存。理论上来说,越靠近右上方的模型越好,圆圈越小的模型越好
说直接点,就是理想情况下我们可以不用重新训练模型,输出结果也不会有明显变化,但是复杂度降到了$\mathcal{O}(n)$!看起来真的是“天上掉馅饼”般的改进了,真的有这么美好吗?
4
Dec
层次分解位置编码,让BERT可以处理超长文本
By 苏剑林 | 2020-12-04 | 118125位读者 | 引用大家都知道,目前的主流的BERT模型最多能处理512个token的文本。导致这一瓶颈的根本原因是BERT使用了从随机初始化训练出来的绝对位置编码,一般的最大位置设为了512,因此顶多只能处理512个token,多出来的部分就没有位置编码可用了。当然,还有一个重要的原因是Attention的$\mathcal{O}(n^2)$复杂度,导致长序列时显存用量大大增加,一般显卡也finetune不了。
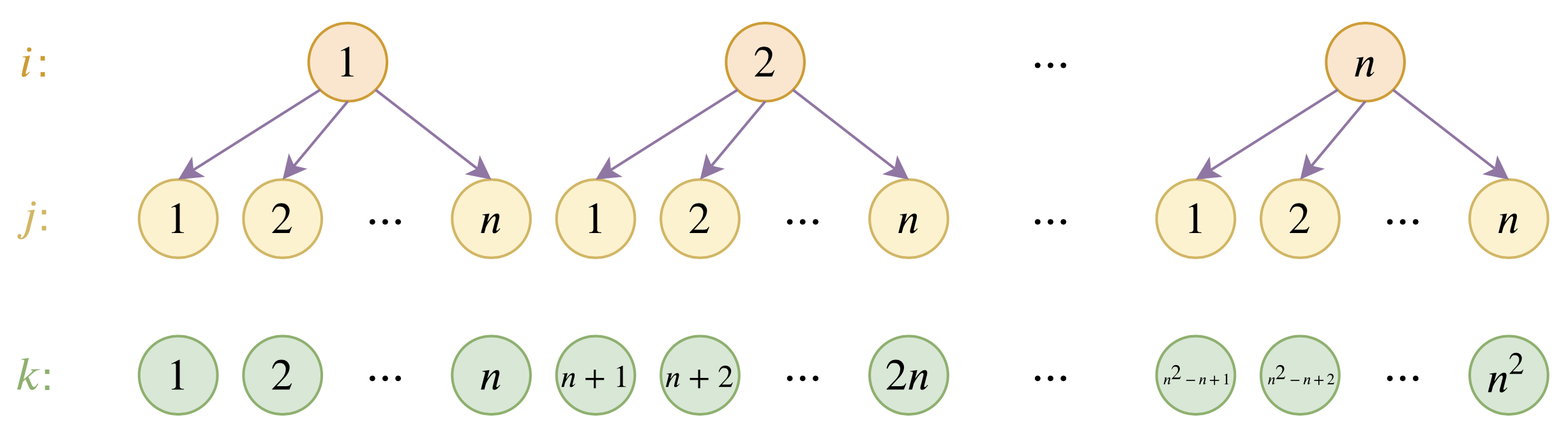
位置编码的层次分解示意图
本文主要面向前一个原因,即假设有足够多的显存前提下,如何简单修改当前最大长度为512的BERT模型,使得它可以直接处理更长的文本,主要思路是层次分解已经训练好的绝对位置编码,使得它可以延拓到更长的位置。
7
Dec
【龟鱼记】全陶粒的同程底滤生态缸
By 苏剑林 | 2020-12-07 | 55546位读者 | 引用
3
Feb
让研究人员绞尽脑汁的Transformer位置编码
By 苏剑林 | 2021-02-03 | 191540位读者 | 引用不同于RNN、CNN等模型,对于Transformer模型来说,位置编码的加入是必不可少的,因为纯粹的Attention模块是无法捕捉输入顺序的,即无法区分不同位置的Token。为此我们大体有两个选择:1、想办法将位置信息融入到输入中,这构成了绝对位置编码的一般做法;2、想办法微调一下Attention结构,使得它有能力分辨不同位置的Token,这构成了相对位置编码的一般做法。
虽然说起来主要就是绝对位置编码和相对位置编码两大类,但每一类其实又能衍生出各种各样的变种,为此研究人员可算是煞费苦心、绞尽脑汁了,此外还有一些不按套路出牌的位置编码。本文就让我们来欣赏一下研究人员为了更好地表达位置信息所构建出来的“八仙过海,各显神通”般的编码方案。
绝对位置编码
形式上来看,绝对位置编码是相对简单的一种方案,但即便如此,也不妨碍各路研究人员的奇思妙想,也有不少的变种。一般来说,绝对位置编码会加到输入中:在输入的第$k$个向量$\boldsymbol{x}_k$中加入位置向量$\boldsymbol{p}_k$变为$\boldsymbol{x}_k + \boldsymbol{p}_k$,其中$\boldsymbol{p}_k$只依赖于位置编号$k$。
26
Apr
中文任务还是SOTA吗?我们给SimCSE补充了一些实验
By 苏剑林 | 2021-04-26 | 228881位读者 | 引用今年年初,笔者受到BERT-flow的启发,构思了成为“BERT-whitening”的方法,并一度成为了语义相似度的新SOTA(参考《你可能不需要BERT-flow:一个线性变换媲美BERT-flow》,论文为《Whitening Sentence Representations for Better Semantics and Faster Retrieval》)。然而“好景不长”,在BERT-whitening提交到Arxiv的不久之后,Arxiv上出现了至少有两篇结果明显优于BERT-whitening的新论文。
第一篇是《Generating Datasets with Pretrained Language Models》,这篇借助模板从GPT2_XL中无监督地构造了数据对来训练相似度模型,个人认为虽然有一定的启发而且效果还可以,但是复现的成本和变数都太大。另一篇则是本文的主角《SimCSE: Simple Contrastive Learning of Sentence Embeddings》,它提出的SimCSE在英文数据上显著超过了BERT-flow和BERT-whitening,并且方法特别简单~
那么,SimCSE在中文上同样有效吗?能大幅提高中文语义相似度的效果吗?本文就来做些补充实验。
10
May
Transformer升级之路:4、二维位置的旋转式位置编码
By 苏剑林 | 2021-05-10 | 99641位读者 | 引用在之前的文章《Transformer升级之路:2、博采众长的旋转式位置编码》中我们提出了旋转式位置编码RoPE以及对应的Transformer模型RoFormer。由于笔者主要研究的领域还是NLP,所以本来这个事情对于笔者来说已经完了。但是最近一段时间,Transformer模型在视觉领域也大火,各种Vision Transformer(ViT)层出不穷,于是就有了问题:二维情形的RoPE应该是怎样的呢?
咋看上去,这个似乎应该只是一维情形的简单推广,但其中涉及到的推导和理解却远比我们想象中复杂,本文就对此做一个分析,从而深化我们对RoPE的理解。
二维RoPE
什么是二维位置?对应的二维RoPE又是怎样的?它的难度在哪里?在这一节中,我们先简单介绍二维位置,然后直接给出二维RoPE的结果和推导思路,在随后的几节中,我们再详细给出推导过程。
29
Jun

最近评论