






5
Jun
为什么梯度裁剪能加速训练过程?一个简明的分析
By 苏剑林 | 2020-06-05 | 33168位读者 | 引用本文介绍来自MIT的一篇ICLR 2020满分论文《Why gradient clipping accelerates training: A theoretical justification for adaptivity》,顾名思义,这篇论文就是分析为什么梯度裁剪能加速深度学习的训练过程。原文很长,公式很多,还有不少研究复杂性的概念,说实话对笔者来说里边的大部分内容也是懵的,不过大概能捕捉到它的核心思想:引入了比常用的L约束更宽松的约束条件,从新的条件出发论证了梯度裁剪的必要性。本文就是来简明分析一下这个过程,供读者参考。
梯度裁剪
假设需要最小化的函数为$f(\theta)$,$\theta$就是优化参数,那么梯度下降的更新公式就是
\begin{equation}\theta \leftarrow \theta-\eta \nabla_{\theta} f(\theta)\end{equation}
其中$\eta$就是学习率。而所谓梯度裁剪(gradient clipping),就是根据梯度的模长来对更新量做一个缩放,比如
\begin{equation}\theta \leftarrow \theta- \eta \nabla_{\theta} f(\theta)\times \min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\label{eq:clip-1}\end{equation}
或者
\begin{equation}\theta \leftarrow \theta- \eta \nabla_{\theta} f(\theta)\times \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert+\gamma}\label{eq:clip-2}\end{equation}
其中$\gamma > 0$是一个常数。这两种方式都被视为梯度裁剪,总的来说就是控制更新量的模长不超过一个常数,第二种形式也跟RMSProp等自适应学习率优化器相关。此外,更精确地,我们有下面的不等式
\begin{equation}\frac{1}{2}\min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\leq \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert+\gamma}\leq \min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\end{equation}
也就是说两者是可以相互控制的,所以其实两者基本是等价的。
31
Jul
我们真的需要把训练集的损失降低到零吗?
By 苏剑林 | 2020-07-31 | 67682位读者 | 引用在训练模型的时候,我们需要损失函数一直训练到0吗?显然不用。一般来说,我们是用训练集来训练模型,但希望的是验证集的损失越小越好,而正常来说训练集的损失降低到一定值后,验证集的损失就会开始上升,因此没必要把训练集的损失降低到0。
既然如此,在已经达到了某个阈值之后,我们可不可以做点别的事情来提升模型性能呢?ICML 2020的论文《Do We Need Zero Training Loss After Achieving Zero Training Error?》回答了这个问题。不过论文的回答也仅局限在“是什么”这个层面上,并没很好地描述“为什么”,另外看了知乎上kid丶大佬的解读,也没找到自己想要的答案。因此自己分析了一下,记录在此。
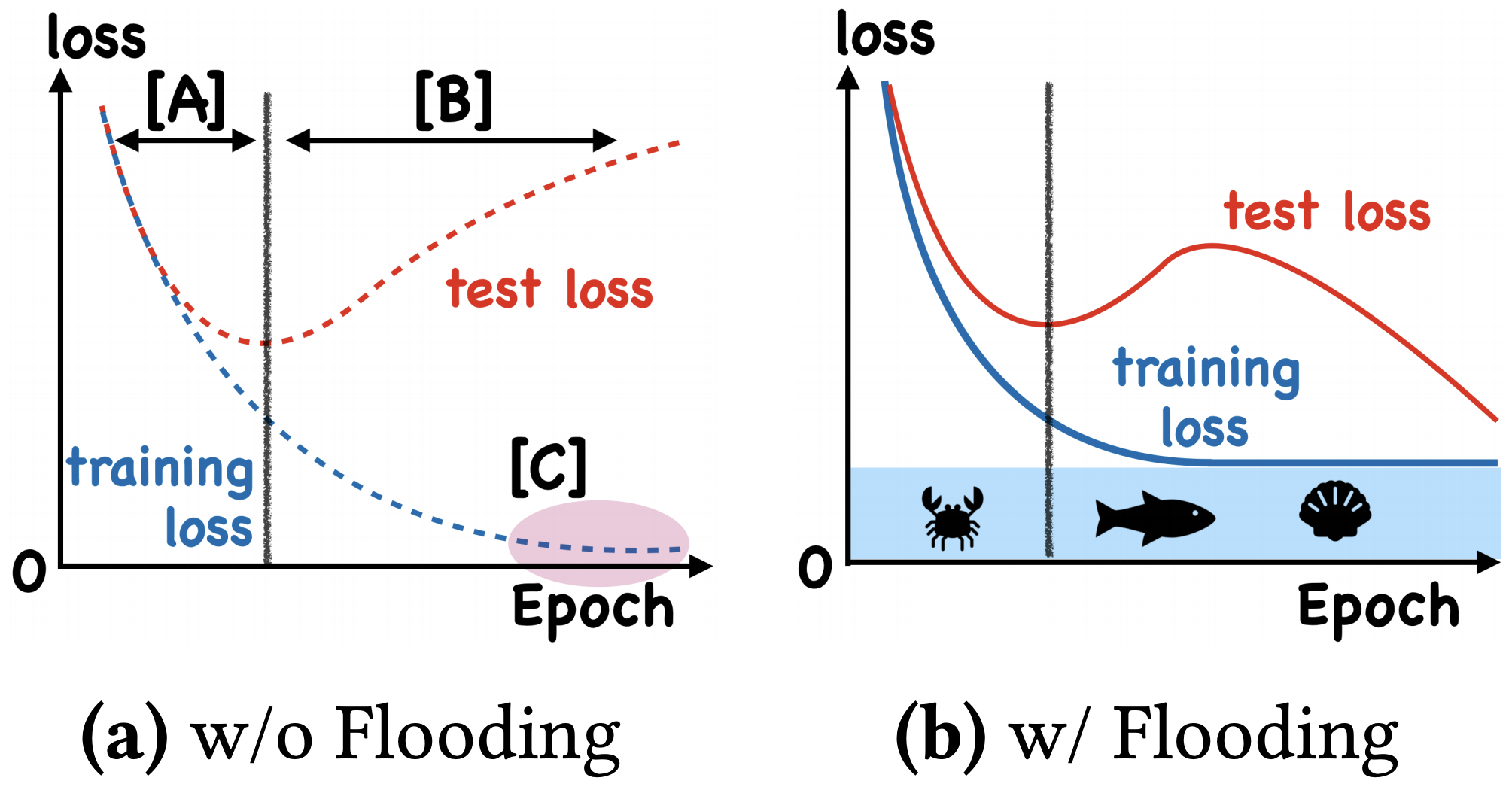
左图:不加Flooding的训练示意图;右图:加了Flooding的训练示意图
13
Nov
也来谈谈RNN的梯度消失/爆炸问题
By 苏剑林 | 2020-11-13 | 90947位读者 | 引用尽管Transformer类的模型已经攻占了NLP的多数领域,但诸如LSTM、GRU之类的RNN模型依然在某些场景下有它的独特价值,所以RNN依然是值得我们好好学习的模型。而对于RNN梯度的相关分析,则是一个从优化角度思考分析模型的优秀例子,值得大家仔细琢磨理解。君不见,诸如“LSTM为什么能解决梯度消失/爆炸”等问题依然是目前流行的面试题之一...
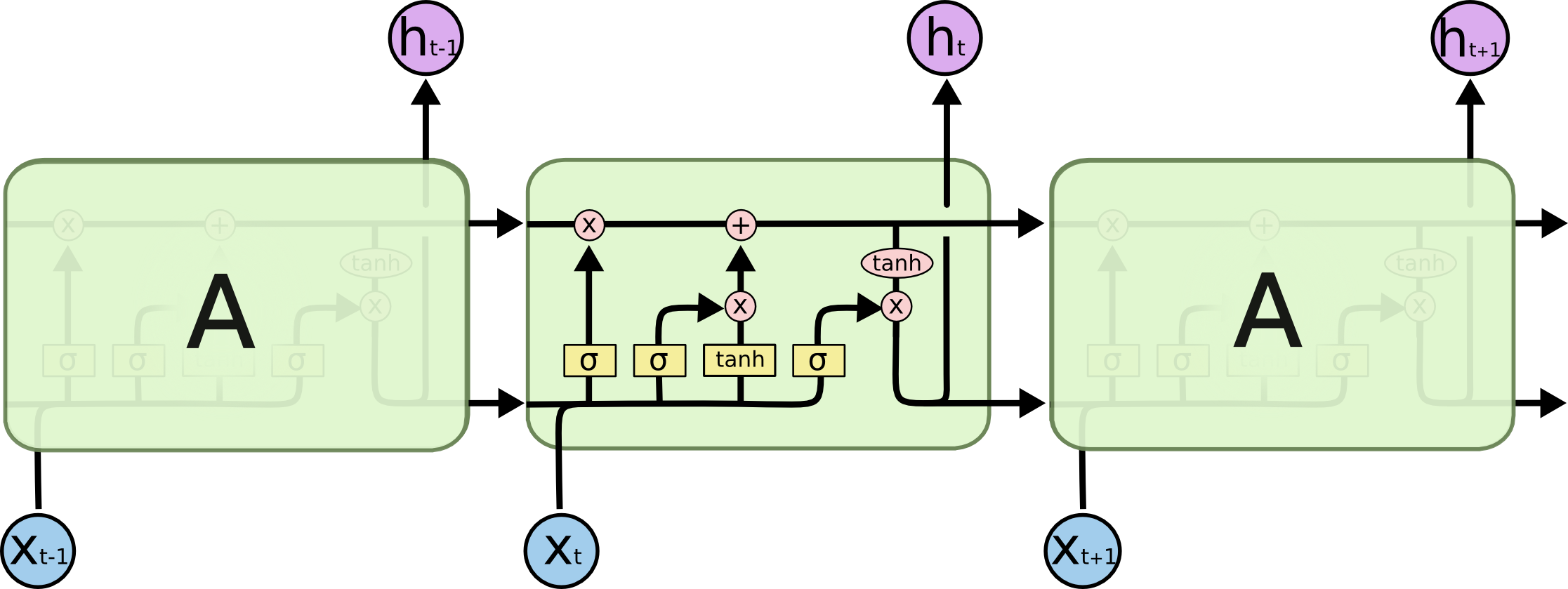
经典的LSTM
关于此类问题,已有不少网友做出过回答,然而笔者查找了一些文章(包括知乎上的部分回答、专栏以及经典的英文博客),发现没有找到比较好的答案:有些推导记号本身就混乱不堪,有些论述过程没有突出重点,整体而言感觉不够清晰自洽。为此,笔者也尝试给出自己的理解,供大家参考。
16
Feb
Nyströmformer:基于矩阵分解的线性化Attention方案
By 苏剑林 | 2021-02-16 | 45831位读者 | 引用标准Attention的$\mathcal{O}(n^2)$复杂度可真是让研究人员头大。前段时间我们在博文《Performer:用随机投影将Attention的复杂度线性化》中介绍了Google的Performer模型,它通过随机投影的方式将标准Attention转化为线性Attention。无独有偶,前些天Arxiv上放出了AAAI 2021的一篇论文《Nyströmformer: A Nyström-Based Algorithm for Approximating Self-Attention》,里边又提出了一种从另一个角度把标准Attention线性化的方案。
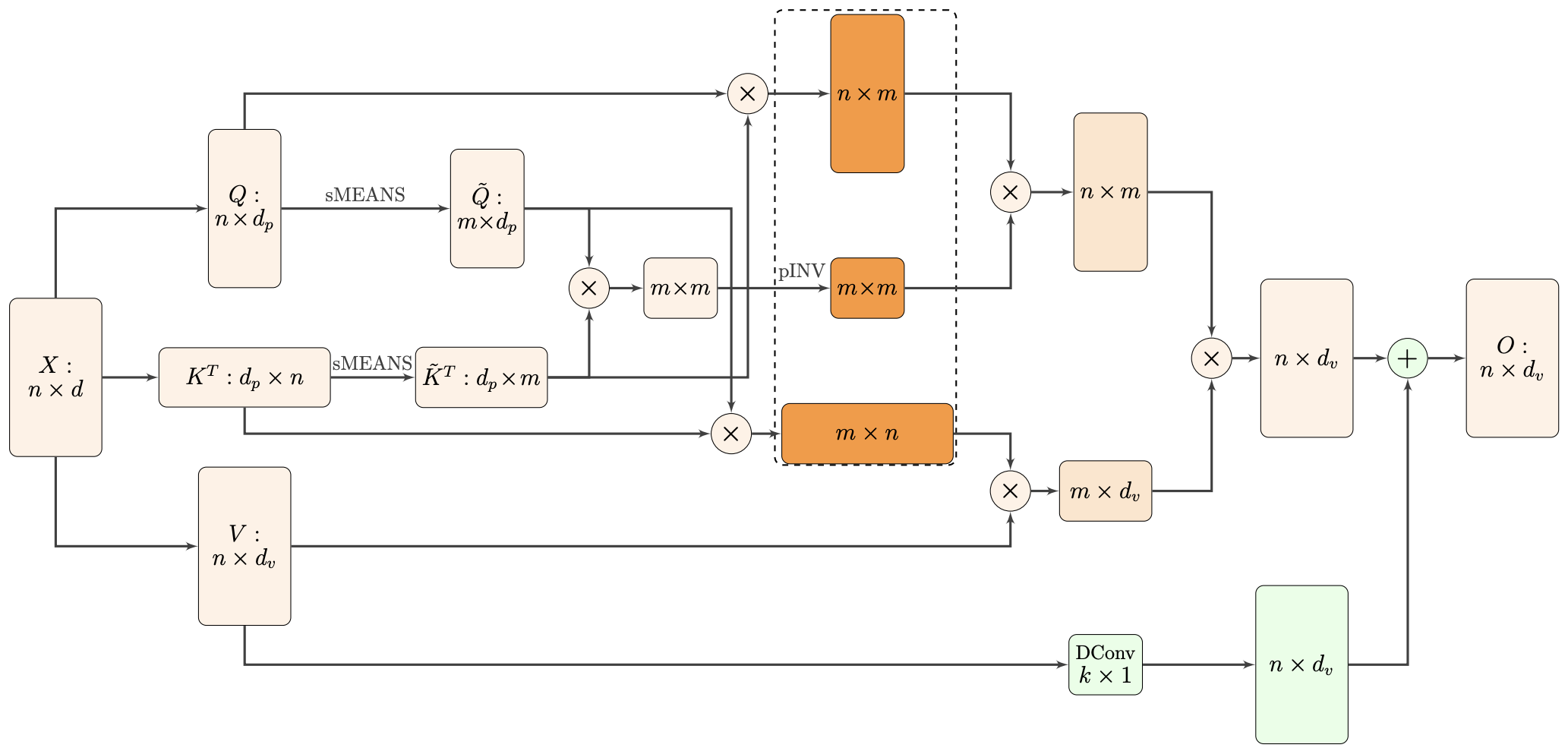
Nyströmformer结构示意图
该方案写的是Nyström-Based,顾名思义是利用了Nyström方法来近似标准Attention的。但是坦白说,在看到这篇论文之前,笔者也完全没听说过Nyström方法,而纵观整篇论文,里边也全是笔者一眼看上去感觉很茫然的矩阵分解推导,理解起来颇为困难。不过有趣的是,尽管作者的推导很复杂,但笔者发现最终的结果可以通过一个相对来说更简明的方式来理解,遂将笔者对Nyströmformer的理解整理在此,供大家参考。
1
May
GlobalPointer:用统一的方式处理嵌套和非嵌套NER
By 苏剑林 | 2021-05-01 | 311175位读者 | 引用(注:本文的相关内容已整理成论文《Global Pointer: Novel Efficient Span-based Approach for Named Entity Recognition》,如需引用可以直接引用英文论文,谢谢。)
本文将介绍一个称为GlobalPointer的设计,它利用全局归一化的思路来进行命名实体识别(NER),可以无差别地识别嵌套实体和非嵌套实体,在非嵌套(Flat NER)的情形下它能取得媲美CRF的效果,而在嵌套(Nested NER)情形它也有不错的效果。还有,在理论上,GlobalPointer的设计思想就比CRF更合理;而在实践上,它训练的时候不需要像CRF那样递归计算分母,预测的时候也不需要动态规划,是完全并行的,理想情况下时间复杂度是$\mathcal{O}(1)$!
简单来说,就是更漂亮、更快速、更强大!真有那么好的设计吗?不妨继续看看。
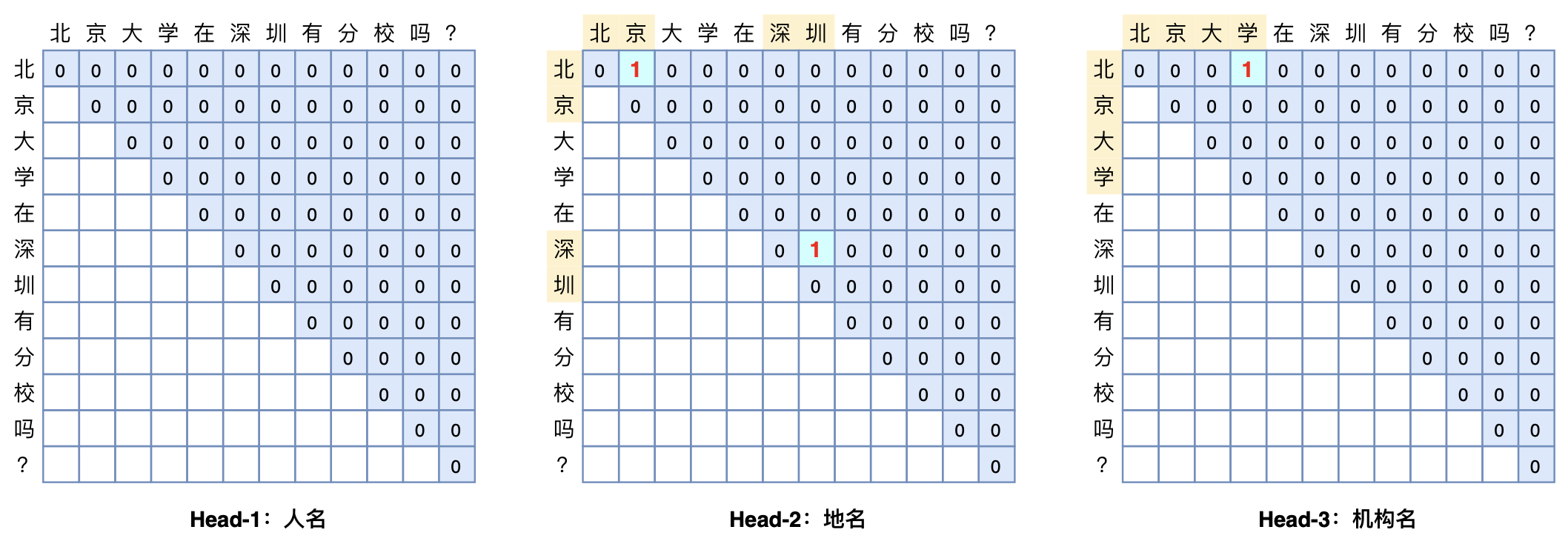
GlobalPointer多头识别嵌套实体示意图
10
May
Transformer升级之路:4、二维位置的旋转式位置编码
By 苏剑林 | 2021-05-10 | 107833位读者 | 引用在之前的文章《Transformer升级之路:2、博采众长的旋转式位置编码》中我们提出了旋转式位置编码RoPE以及对应的Transformer模型RoFormer。由于笔者主要研究的领域还是NLP,所以本来这个事情对于笔者来说已经完了。但是最近一段时间,Transformer模型在视觉领域也大火,各种Vision Transformer(ViT)层出不穷,于是就有了问题:二维情形的RoPE应该是怎样的呢?
咋看上去,这个似乎应该只是一维情形的简单推广,但其中涉及到的推导和理解却远比我们想象中复杂,本文就对此做一个分析,从而深化我们对RoPE的理解。
二维RoPE
什么是二维位置?对应的二维RoPE又是怎样的?它的难度在哪里?在这一节中,我们先简单介绍二维位置,然后直接给出二维RoPE的结果和推导思路,在随后的几节中,我们再详细给出推导过程。
9
Aug
线性Transformer应该不是你要等的那个模型
By 苏剑林 | 2021-08-09 | 102754位读者 | 引用在本博客中,我们已经多次讨论过线性Attention的相关内容。介绍线性Attention的逻辑大体上都是:标准Attention具有$\mathcal{O}(n^2)$的平方复杂度,是其主要的“硬伤”之一,于是我们$\mathcal{O}(n)$复杂度的改进模型,也就是线性Attention。有些读者看到线性Attention的介绍后,就一直很期待我们发布基于线性Attention的预训练模型,以缓解他们被BERT的算力消耗所折腾的“死去活来”之苦。
然而,本文要说的是:抱有这种念头的读者可能要失望了,标准Attention到线性Attention的转换应该远远达不到你的预期,而BERT那么慢的原因也并不是因为标准Attention的平方复杂度。
BERT之反思
按照直观理解,平方复杂度换成线性复杂度不应该要“突飞猛进”才对嘛?怎么反而“远远达不到预期”?出现这个疑惑的主要原因,是我们一直以来都没有仔细评估一下常规的Transformer模型(如BERT)的整体计算量。
26
Jul
FlatNCE:小批次对比学习效果差的原因竟是浮点误差?
By 苏剑林 | 2021-07-26 | 46505位读者 | 引用自SimCLR在视觉无监督学习大放异彩以来,对比学习逐渐在CV乃至NLP中流行了起来,相关研究和工作越来越多。标准的对比学习的一个广为人知的缺点是需要比较大的batch_size(SimCLR在batch_size=4096时效果最佳),小batch_size的时候效果会明显降低,为此,后续工作的改进方向之一就是降低对大batch_size的依赖。那么,一个很自然的问题是:标准的对比学习在小batch_size时效果差的原因究竟是什么呢?
近日,一篇名为《Simpler, Faster, Stronger: Breaking The log-K Curse On Contrastive Learners With FlatNCE》对此问题作出了回答:因为浮点误差。看起来真的很让人难以置信,但论文的分析确实颇有道理,并且所提出的改进FlatNCE确实也工作得更好,让人不得不信服。
细微之处
接下来,笔者将按照自己的理解和记号来介绍原论文的主要内容。对比学习(Contrastive Learning)就不帮大家详细复习了,大体上来说,对于某个样本$x$,我们需要构建$K$个配对样本$y_1,y_2,\cdots,y_K$,其中$y_t$是正样本而其余都是负样本,然后分别给每个样本对$(x, y_i)$打分,分别记为$s_1,s_2,\cdots,s_K$,对比学习希望拉大正负样本对的得分差,通常直接用交叉熵作为损失:
\begin{equation}-\log \frac{e^{s_t}}{\sum\limits_i e^{s_i}} = \log \left(\sum_i e^{s_i}\right) - s_t = \log \left(1 + \sum_{i\neq t} e^{s_i - s_t}\right)\end{equation}

最近评论