






5
Jun
为什么梯度裁剪能加速训练过程?一个简明的分析
By 苏剑林 | 2020-06-05 | 43621位读者 |本文介绍来自MIT的一篇ICLR 2020满分论文《Why gradient clipping accelerates training: A theoretical justification for adaptivity》,顾名思义,这篇论文就是分析为什么梯度裁剪能加速深度学习的训练过程。原文很长,公式很多,还有不少研究复杂性的概念,说实话对笔者来说里边的大部分内容也是懵的,不过大概能捕捉到它的核心思想:引入了比常用的L约束更宽松的约束条件,从新的条件出发论证了梯度裁剪的必要性。本文就是来简明分析一下这个过程,供读者参考。
梯度裁剪 #
假设需要最小化的函数为$f(\theta)$,$\theta$就是优化参数,那么梯度下降的更新公式就是
\begin{equation}\theta \leftarrow \theta-\eta \nabla_{\theta} f(\theta)\end{equation}
其中$\eta$就是学习率。而所谓梯度裁剪(gradient clipping),就是根据梯度的模长来对更新量做一个缩放,比如
\begin{equation}\theta \leftarrow \theta- \eta \nabla_{\theta} f(\theta)\times \min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\label{eq:clip-1}\end{equation}
或者
\begin{equation}\theta \leftarrow \theta- \eta \nabla_{\theta} f(\theta)\times \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert+\gamma}\label{eq:clip-2}\end{equation}
其中$\gamma > 0$是一个常数。这两种方式都被视为梯度裁剪,总的来说就是控制更新量的模长不超过一个常数,第二种形式也跟RMSProp等自适应学习率优化器相关。此外,更精确地,我们有下面的不等式
\begin{equation}\frac{1}{2}\min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\leq \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert+\gamma}\leq \min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\end{equation}
也就是说两者是可以相互控制的,所以其实两者基本是等价的。
L约束 #
有不少优化器相关的理论结果,在其证明中都假设了待优化函数$f(\theta)$的梯度满足如下的L约束:
\begin{equation}\Vert \nabla_{\theta} f(\theta + \Delta \theta) - \nabla_{\theta} f(\theta)\Vert\leq L\Vert \Delta\theta\Vert\label{eq:l-cond}\end{equation}
由于$\frac{\Vert \nabla_{\theta} f(\theta + \Delta \theta) - \nabla_{\theta} f(\theta)\Vert}{\Vert \Delta\theta\Vert}$是梯度的波动程度,实际上衡量的就是$f(\theta)$的光滑程度,所以上述约束也称为“L光滑性条件(L-smooth)”。
关于L约束,本博客也出现过多次,可以参考的文章有《深度学习中的Lipschitz约束:泛化与生成模型》、《BN究竟起了什么作用?一个闭门造车的分析》。值得提醒的是,不同的场景可能会需要不同的L约束,比如有时候我们要假设模型输出关于输入满足L约束,有时候我们要假设模型输出关于参数满足L约束,而上面假设的是模型loss的梯度关于参数满足L约束。
如果条件$\eqref{eq:l-cond}$成立,那么很多优化问题都将大大简化。因为我们可以证明(证明过程可参考这里)
\begin{equation}f(\theta+\Delta\theta) \leq f(\theta) + \left\langle \nabla_{\theta}f(\theta), \Delta\theta\right\rangle + \frac{1}{2}L \Vert \Delta\theta\Vert^2\label{eq:neq-1}\end{equation}
对于梯度下降来说,$\Delta\theta = -\eta \nabla_{\theta} f(\theta)$,代入上式得到
\begin{equation}f(\theta+\Delta\theta) \leq f(\theta) + \left(\frac{1}{2}L\eta^2 - \eta\right) \Vert \nabla_{\theta}f(\theta)\Vert^2\end{equation}
因此,为了保证每一步优化都使得$f(\theta)$下降,一个充分条件是$\frac{1}{2}L\eta^2 - \eta < 0$,即$\eta < \frac{2}{L}$,而$\frac{1}{2}L\eta^2 - \eta$的最小值在$\eta^* = \frac{1}{L} < \frac{2}{L}$时取到,所以只需要让学习率为$\frac{1}{L}$,那么每步迭代都可以使得$f(\theta)$下降,并且下降速度最快。
放松约束 #
条件$\eqref{eq:l-cond}$还可以带来很多漂亮的结果,然而问题是在很多实际优化问题中条件$\eqref{eq:l-cond}$并不成立,比如四次函数$f(\theta)=\theta^4$,这就导致了理论与实际的差距。而本文要介绍的论文,则引入了一个新的更宽松的约束:
\begin{equation}\Vert \nabla_{\theta} f(\theta + \Delta \theta) - \nabla_{\theta} f(\theta)\Vert\leq \left(L_0 + L_1\Vert \nabla_{\theta} f(\theta)\Vert\right)\Vert \Delta\theta\Vert\end{equation}
也就是将常数$L$换成动态的$L_0 + L_1\Vert \nabla_{\theta} f(\theta)\Vert$,原文称之为“(L0, L1)-smooth”,这里也称为“(L0, L1)约束”。显然这个条件就宽松多了,比如可以检验$\theta^4$是满足这个条件的,因此基于此条件所推导出的理论结果适用范围会更广。
作者们是怎么提出这个条件的呢?论文说做实验观察出来的:
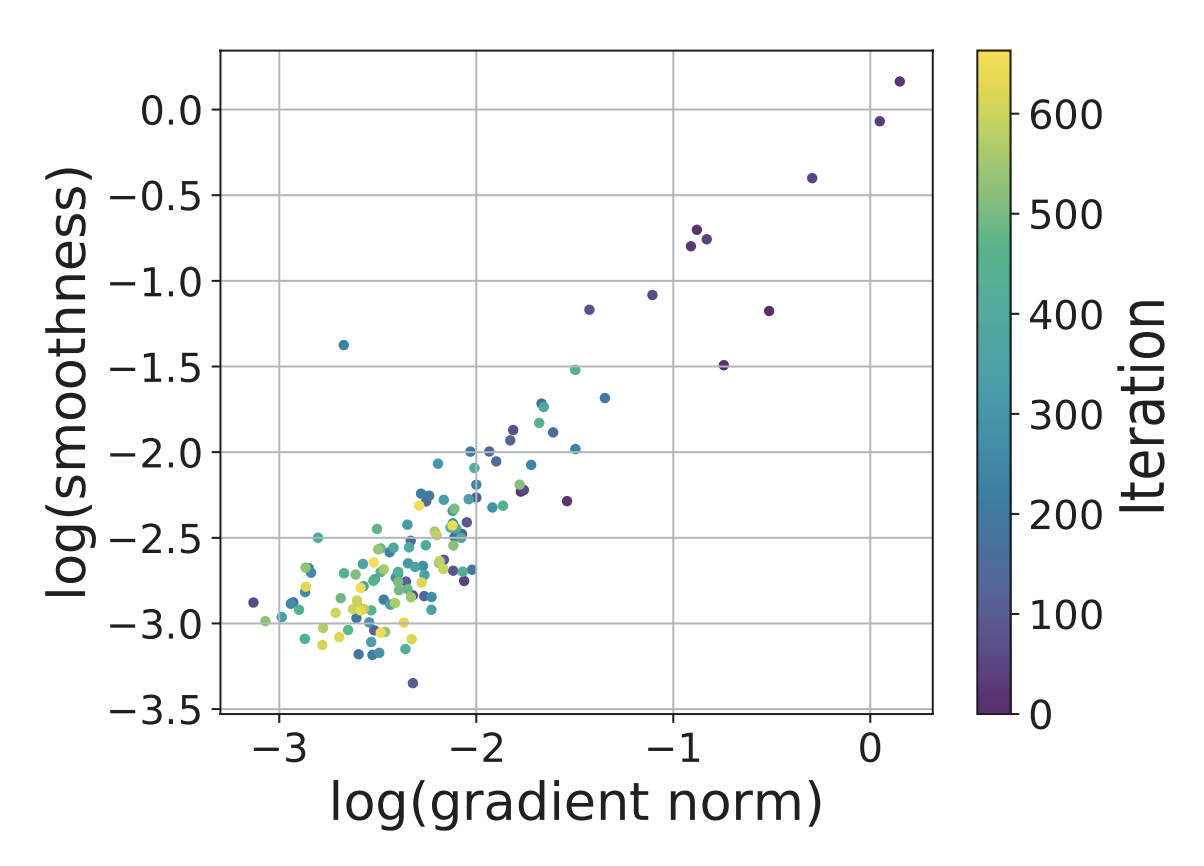
论文观察到损失函数的光滑程度与梯度模长呈“线性相关”关系
但笔者感觉吧,至少应该还有些从结果反推的成分在里边,不然谁那么无聊会去观察这两者的关系呢?
在新的约束之下,不等式$\eqref{eq:neq-1}$依旧是成立的,只不过$L$换成对应的动态项:
\begin{equation}f(\theta+\Delta\theta) \leq f(\theta) + \left\langle \nabla_{\theta}f(\theta), \Delta\theta\right\rangle + \frac{1}{2}\left(L_0 + L_1\Vert \nabla_{\theta} f(\theta)\Vert\right) \Vert \Delta\theta\Vert^2\end{equation}
代入$\Delta\theta = -\eta \nabla_{\theta} f(\theta)$得到
\begin{equation}f(\theta+\Delta\theta) \leq f(\theta) + \left(\frac{1}{2}\left(L_0 + L_1\Vert \nabla_{\theta} f(\theta)\Vert\right)\eta^2 - \eta\right) \Vert \nabla_{\theta}f(\theta)\Vert^2\end{equation}
所以很明显了,现在要保证每一步下降,那么就要求
\begin{equation}\eta < \frac{2}{L_0 + L_1\Vert \nabla_{\theta} f(\theta)\Vert}\end{equation}
以及最优学习率是
\begin{equation}\eta^* = \frac{1}{L_0 + L_1\Vert \nabla_{\theta} f(\theta)\Vert}\end{equation}
这就导出了梯度裁剪$\eqref{eq:clip-2}$。而保证了每一步都下降,那么就意味着在优化过程中每一步都没有做无用功,所以也就加速了训练过程。
文章小结 #
本文简要介绍了ICLR 2020的一篇分析梯度裁剪的满分论文,主要思路是引入了更宽松普适的假设条件,在新的条件下能体现出了梯度裁剪的必要性,并且由于放松了传统的约束,因此理论结果的适用范围更广,这也就表明,梯度裁剪确实是很多场景下都适用的技巧之一。
转载到请包括本文地址:https://spaces.ac.cn/archives/7469
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Jun. 05, 2020). 《为什么梯度裁剪能加速训练过程?一个简明的分析 》[Blog post]. Retrieved from https://spaces.ac.cn/archives/7469
@online{kexuefm-7469,
title={为什么梯度裁剪能加速训练过程?一个简明的分析},
author={苏剑林},
year={2020},
month={Jun},
url={\url{https://spaces.ac.cn/archives/7469}},
}

June 17th, 2020
个人认为剃度裁剪会削弱模型跳出局部最优解的能力,当模型局部位于山腰上某个小坑时,根据文中所说,每一步更新都是剃度下降方向,那么模型的解就会陷入这个局部位置,无法跳出,从本质上来说,剃度裁剪依然是自适应学习率的范畴。
以上是个人拙见,如有不妥还请作者指正。
其实很多理论结果都是针对纯粹梯度下降的,也就是不包含动量,而动量有助于找到更好的局部最小值点。
对于动量,或许我们可以将它看成是梯度的滑动平均,可以视为一种更精准的梯度估计,所以梯度裁剪就变成了动量裁剪,从某种意义上来看其实也等价于Adam。