






14
Feb
多任务学习漫谈(三):分主次之序
By 苏剑林 | 2022-02-14 | 34649位读者 | 引用多任务学习是一个很宽泛的命题,不同场景下多任务学习的目标不尽相同。在《多任务学习漫谈(一):以损失之名》和《多任务学习漫谈(二):行梯度之事》中,我们将多任务学习的目标理解为“做好每一个任务”,具体表现是“尽量平等地处理每一个任务”,我们可以称之为“平行型多任务学习”。然而,并不是所有多任务学习的目标都是如此,在很多场景下,我们主要还是想学好某一个主任务,其余任务都只是辅助,希望通过增加其他任务的学习来提升主任务的效果罢了,此类场景我们可以称为“主次型多任务学习”。
在这个背景下,如果还是沿用平行型多任务学习的“做好每一个任务”的学习方案,那么就可能会明显降低主任务的效果了。所以本文继续沿着“行梯度之事”的想法,探索主次型多任务学习的训练方案。
目标形式
在这篇文章中,我们假设读者已经阅读并且基本理解《多任务学习漫谈(二):行梯度之事》里边的思想和方法,那么在梯度视角下,让某个损失函数保持下降的必要条件是更新量与其梯度夹角至少大于90度,这是贯穿全文的设计思想。
25
Feb
FLASH:可能是近来最有意思的高效Transformer设计
By 苏剑林 | 2022-02-25 | 172901位读者 | 引用高效Transformer,泛指所有概率Transformer效率的工作,笔者算是关注得比较早了,最早的博客可以追溯到2019年的《为节约而生:从标准Attention到稀疏Attention》,当时做这块的工作很少。后来,这类工作逐渐多了,笔者也跟进了一些,比如线性Attention、Performer、Nyströmformer,甚至自己也做了一些探索,比如之前的“Transformer升级之路”。再后来,相关工作越来越多,但大多都很无趣,所以笔者就没怎么关注了。
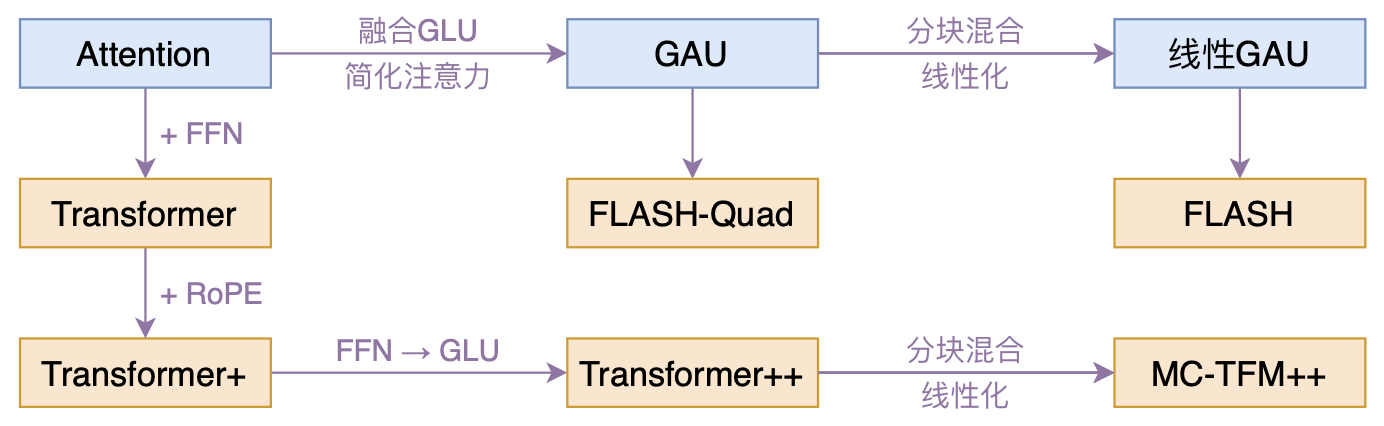
本文模型脉络图
大抵是“久旱逢甘霖”的感觉,最近终于出现了一个比较有意思的高效Transformer工作——来自Google的《Transformer Quality in Linear Time》,经过细读之后,笔者认为论文里边真算得上是“惊喜满满”了~
21
Mar
RoFormerV2:自然语言理解的极限探索
By 苏剑林 | 2022-03-21 | 56906位读者 | 引用大概在1年前,我们提出了旋转位置编码(RoPE),并发布了对应的预训练模型RoFormer。随着时间的推移,RoFormer非常幸运地得到了越来越多的关注和认可,比如EleutherAI新发布的60亿和200亿参数的GPT模型中就用上了RoPE位置编码,Google新提出的FLASH模型论文中则明确指出了RoPE对Transformer效果有明显的提升作用。
与此同时,我们也一直在尝试继续加强RoFormer模型,试图让RoFormer的性能“更上一层楼”。经过近半年的努力,我们自认为取得了还不错的成果,因此将其作为“RoFormerV2”正式发布:
7
Apr
听说Attention与Softmax更配哦~
By 苏剑林 | 2022-04-07 | 71249位读者 | 引用不知道大家留意到一个细节没有,就是当前NLP主流的预训练模式都是在一个固定长度(比如512)上进行,然后直接将预训练好的模型用于不同长度的任务中。大家似乎也没有对这种模式有过怀疑,仿佛模型可以自动泛化到不同长度是一个“理所应当”的能力。
当然,笔者此前同样也没有过类似的质疑,直到前几天笔者做了Base版的GAU实验后才发现GAU的长度泛化能力并不如想象中好。经过进一步分析后,笔者才明白原来这种长度泛化的能力并不是“理所当然”的......
模型回顾
在《FLASH:可能是近来最有意思的高效Transformer设计》中,我们介绍了“门控注意力单元GAU”,它是一种融合了GLU和Attention的新设计。
除了效果,GAU在设计上给我们带来的冲击主要有两点:一是它显示了单头注意力未必就逊色于多头注意力,这奠定了它“快”、“省”的地位;二是它是显示了注意力未必需要Softmax归一化,可以换成简单的$\text{relu}^2$除以序列长度:
\begin{equation}\boldsymbol{A}=\frac{1}{n}\text{relu}^2\left(\frac{\mathcal{Q}(\boldsymbol{Z})\mathcal{K}(\boldsymbol{Z})^{\top}}{\sqrt{s}}\right)=\frac{1}{ns}\text{relu}^2\left(\mathcal{Q}(\boldsymbol{Z})\mathcal{K}(\boldsymbol{Z})^{\top}\right)\end{equation}
17
Mar
为什么现在的LLM都是Decoder-only的架构?
By 苏剑林 | 2023-03-17 | 99938位读者 | 引用LLM是“Large Language Model”的简写,目前一般指百亿参数以上的语言模型,主要面向文本生成任务。跟小尺度模型(10亿或以内量级)的“百花齐放”不同,目前LLM的一个现状是Decoder-only架构的研究居多,像OpenAI一直坚持Decoder-only的GPT系列就不说了,即便是Google这样的并非全部押注在Decoder-only的公司,也确实投入了不少的精力去研究Decoder-only的模型,如PaLM就是其中之一。那么,为什么Decoder-only架构会成为LLM的主流选择呢?
知乎上也有同款问题《为什么现在的LLM都是Decoder only的架构?》,上面的回答大多数聚焦于Decoder-only在训练效率和工程实现上的优势,那么它有没有理论上的优势呢?本文试图从这个角度进行简单的分析。
统一视角
需要指出的是,笔者目前训练过的模型,最大也就是10亿级别的,所以从LLM的一般概念来看是没资格回答这个问题的,下面的内容只是笔者根据一些研究经验,从偏理论的角度强行回答一波。文章多数推论以自己的实验结果为引,某些地方可能会跟某些文献的结果冲突,请读者自行取舍。
31
Jul
Transformer升级之路:11、将β进制位置进行到底
By 苏剑林 | 2023-07-31 | 47457位读者 | 引用在文章《Transformer升级之路:10、RoPE是一种β进制编码》中,我们给出了RoPE的$\beta$进制诠释,并基于进制转化的思路推导了能够在不微调的情况下就可以扩展Context长度的NTK-aware Scaled RoPE。不得不说,通过类比$\beta$进制的方式来理解位置编码,确实是一个非常美妙且富有启发性的视角,以至于笔者每次深入思考和回味之时,似乎总能从中得到新的领悟和收获。
本文将重新回顾RoPE的$\beta$进制诠释,并尝试将已有的NTK-aware Scaled RoPE一般化,以期望找到一种更优的策略来不微调地扩展LLM的Context长度。
进制类比
我们知道,RoPE的参数化沿用了Sinusoidal位置编码的形式。而不知道是巧合还是故意为之,整数$n$的Sinusoidal位置编码,与它的$\beta$进制编码,有很多相通之处。
7
Aug
Transformer升级之路:12、无限外推的ReRoPE?
By 苏剑林 | 2023-08-07 | 60690位读者 | 引用自从在《Transformer升级之路:11、将β进制位置进行到底》中引入混合进制的思路进一步推广了NTK-aware Scaled RoPE后,笔者感觉类似思路的效果已经达到了上限,想要更大幅度的提升就必须另辟蹊径了。这时候笔者想起了此前构思过的一个思路,该思路由于复杂度较高所以被搁置下了,既然现在已经遇到了瓶颈,那么“唯一的办法就是最好的办法”,于是便将它重拾起来。
万万没想到的是,尽管该方法增加了一些推理复杂度,但它的实验效果却惊人地好——甚至隐约有无限的长度外推能力!因此,笔者迫不及待地撰写了本文来分享该方法。由于形式上跟ReLU激活函数的相似性,所以笔者将该方法命名为“ReRoPE (Rectified Rotary Position Embeddings)”。
重温
我们知道,RoPE形式上是一种绝对位置编码,但实际上给Attention带来的是相对位置信息,即如下的Toeplitz矩阵:
20
Mar
《为什么现在的LLM都是Decoder-only的架构?》FAQ
By 苏剑林 | 2023-03-20 | 48032位读者 | 引用上周笔者写了《为什么现在的LLM都是Decoder-only的架构?》,总结了一下我在这个问题上的一些实验结论和猜测。果然是热点问题流量大,paperweekly的转发没多久阅读量就破万了,知乎上点赞数也不少。在几个平台上,陆陆续续收到了读者的一些意见或者疑问,总结了其中一些有代表性的问题,做成了本篇FAQ,希望能进一步帮助大家解决疑惑。
回顾
在《为什么现在的LLM都是Decoder-only的架构?》中,笔者对GPT和UniLM两种架构做了对比实验,然后结合以往的研究经历,猜测了如下结论:
1、输入部分的注意力改为双向不会带来收益,Encoder-Decoder架构的优势很可能只是源于参数翻倍;
2、双向注意力没有带来收益,可能是因为双向注意力的低秩问题导致效果下降。
所以,基于这两点推测,我们得到结论:
在同等参数量、同等推理成本下,Decoder-only架构是最优选择。

最近评论