






27
Aug
自己实现了一个bert4keras
By 苏剑林 | 2019-08-27 | 173707位读者 | 引用分享个人实现的bert4keras:
8
Jul
用时间换取效果:Keras梯度累积优化器
By 苏剑林 | 2019-07-08 | 78275位读者 | 引用现在Keras中你也可以用小的batch size实现大batch size的效果了——只要你愿意花$n$倍的时间,可以达到$n$倍batch size的效果,而不需要增加显存。
Github地址:https://github.com/bojone/accum_optimizer_for_keras
扯淡
在一两年之前,做NLP任务都不用怎么担心OOM问题,因为相比CV领域的模型,其实大多数NLP模型都是很浅的,极少会显存不足。幸运或者不幸的是,Bert出世了,然后火了。Bert及其后来者们(GPT-2、XLNET等)都是以足够庞大的Transformer模型为基础,通过足够多的语料预训练模型,然后通过fine tune的方式来完成特定的NLP任务。
21
Jul
思考:两个椭圆片能粘合成一个立体吗?
By 苏剑林 | 2019-07-21 | 58280位读者 | 引用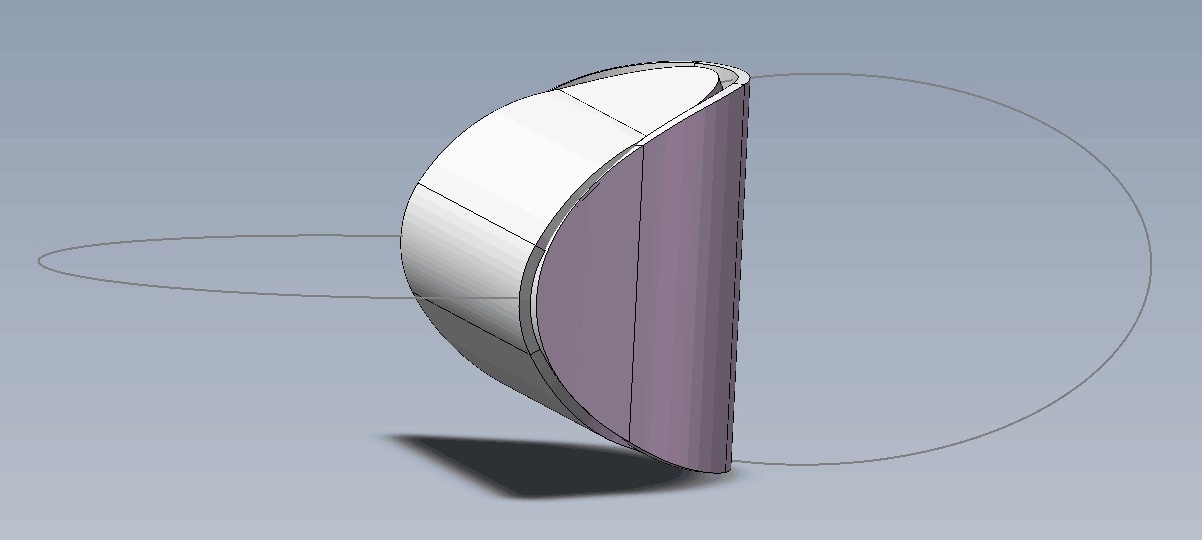
9
Sep
重新写了之前的新词发现算法:更快更好的新词发现
By 苏剑林 | 2019-09-09 | 95084位读者 | 引用新词发现是NLP的基础任务之一,主要是希望通过无监督发掘一些语言特征(主要是统计特征),来判断一批语料中哪些字符片段可能是一个新词。本站也多次围绕“新词发现”这个话题写过文章,比如:
在这些文章之中,笔者觉得理论最漂亮的是《基于语言模型的无监督分词》,而作为新词发现算法来说综合性能比较好的应该是《更好的新词发现算法》,本文就是复现这篇文章的新词发现算法。
29
Jan
抛开约束,增强模型:一行代码提升albert表现
By 苏剑林 | 2020-01-29 | 78022位读者 | 引用
2
Apr
bert4keras在手,baseline我有:百度LIC2020
By 苏剑林 | 2020-04-02 | 91065位读者 | 引用百度的“2020语言与智能技术竞赛”开赛了,今年有五个赛道,分别是机器阅读理解、推荐任务对话、语义解析、关系抽取、事件抽取。每个赛道中,主办方都给出了基于PaddlePaddle的baseline模型,这里笔者也基于bert4keras给出其中三个赛道的个人baseline,从中我们可以看到用bert4keras搭建baseline模型的方便快捷与简练。
思路简析
这里简单分析一下这三个赛道的任务特点以及对应的baseline设计。
25
May
Google新作Synthesizer:我们还不够了解自注意力
By 苏剑林 | 2020-05-25 | 87615位读者 | 引用深度学习这个箱子,远比我们想象的要黑。
写在开头
据说物理学家费曼说过一句话[来源]:“谁要是说他懂得量子力学,那他就是真的不懂量子力学。”我现在越来越觉得,这句话中的“量子力学”也可以替换为“深度学习”。尽管深度学习已经在越来越多的领域证明了其有效性,但我们对它的解释性依然相当无力。当然,这几年来已经有不少工作致力于打开深度学习这个黑箱,但是很无奈,这些工作基本都是“马后炮”式的,也就是在已有的实验结果基础上提出一些勉强能说服自己的解释,无法做到自上而下的构建和理解模型的原理,更不用说提出一些前瞻性的预测。
本文关注的是自注意力机制。直观上来看,自注意力机制算是解释性比较强的模型之一了,它通过自己与自己的Attention来自动捕捉了token与token之间的关联,事实上在《Attention is All You Need》那篇论文中,就给出了如下的看上去挺合理的可视化效果:
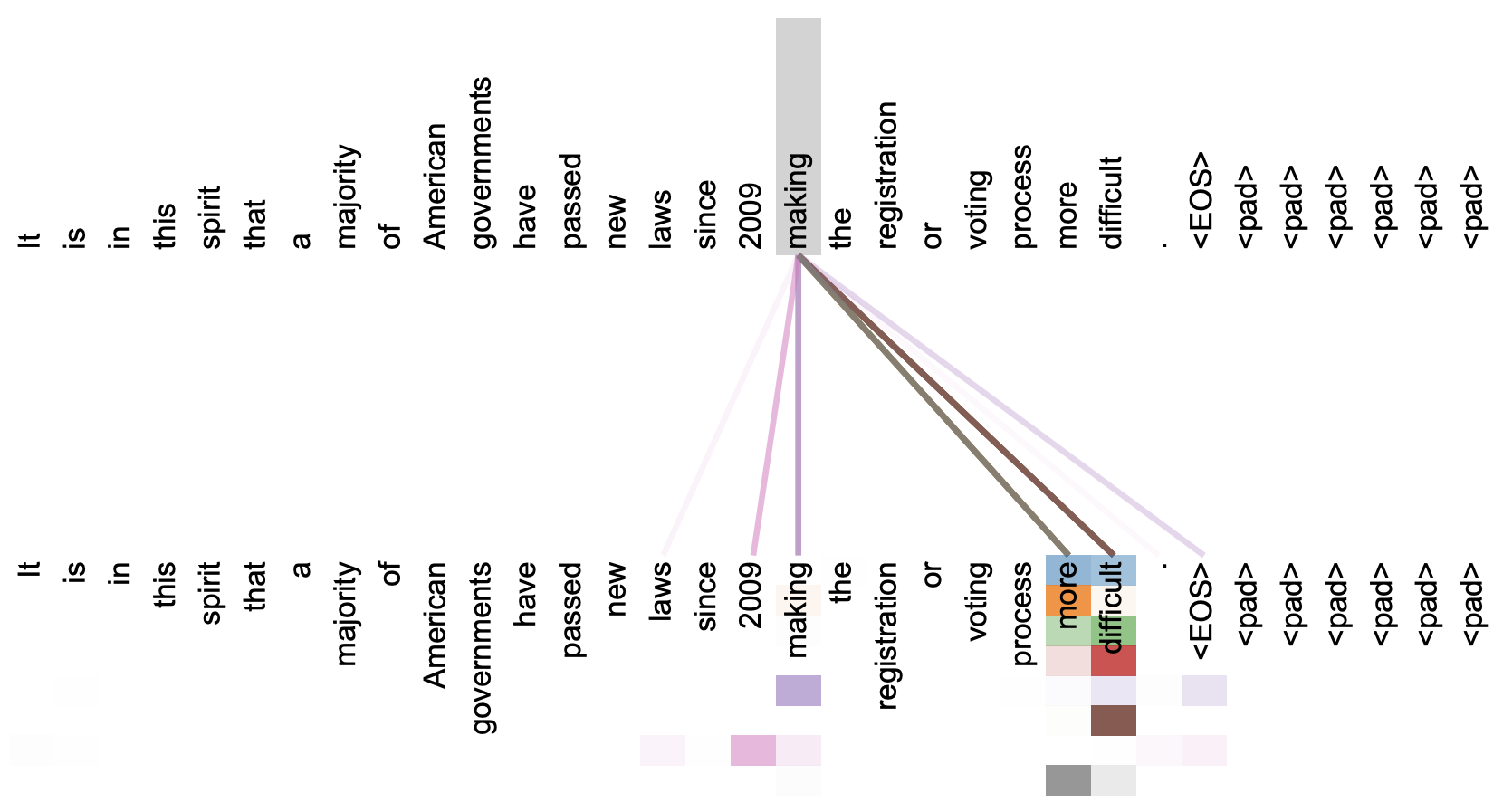
《Attention is All You Need》一文中对Attention的可视化例子
但自注意力机制真的是这样生效的吗?这种“token对token”的注意力是必须的吗?前不久Google的新论文《Synthesizer: Rethinking Self-Attention in Transformer Models》对自注意力机制做了一些“异想天开”的探索,里边的结果也许会颠覆我们对自注意力的认知。
5
Jun
为什么梯度裁剪能加速训练过程?一个简明的分析
By 苏剑林 | 2020-06-05 | 32373位读者 | 引用本文介绍来自MIT的一篇ICLR 2020满分论文《Why gradient clipping accelerates training: A theoretical justification for adaptivity》,顾名思义,这篇论文就是分析为什么梯度裁剪能加速深度学习的训练过程。原文很长,公式很多,还有不少研究复杂性的概念,说实话对笔者来说里边的大部分内容也是懵的,不过大概能捕捉到它的核心思想:引入了比常用的L约束更宽松的约束条件,从新的条件出发论证了梯度裁剪的必要性。本文就是来简明分析一下这个过程,供读者参考。
梯度裁剪
假设需要最小化的函数为$f(\theta)$,$\theta$就是优化参数,那么梯度下降的更新公式就是
\begin{equation}\theta \leftarrow \theta-\eta \nabla_{\theta} f(\theta)\end{equation}
其中$\eta$就是学习率。而所谓梯度裁剪(gradient clipping),就是根据梯度的模长来对更新量做一个缩放,比如
\begin{equation}\theta \leftarrow \theta- \eta \nabla_{\theta} f(\theta)\times \min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\label{eq:clip-1}\end{equation}
或者
\begin{equation}\theta \leftarrow \theta- \eta \nabla_{\theta} f(\theta)\times \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert+\gamma}\label{eq:clip-2}\end{equation}
其中$\gamma > 0$是一个常数。这两种方式都被视为梯度裁剪,总的来说就是控制更新量的模长不超过一个常数,第二种形式也跟RMSProp等自适应学习率优化器相关。此外,更精确地,我们有下面的不等式
\begin{equation}\frac{1}{2}\min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\leq \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert+\gamma}\leq \min\left\{1, \frac{\gamma}{\Vert \nabla_{\theta} f(\theta)\Vert}\right\}\end{equation}
也就是说两者是可以相互控制的,所以其实两者基本是等价的。
关于站长
智能搜索
支持整句搜索!网站自动使用结巴分词进行分词,并结合ngrams排序算法给出合理的搜索结果。

最近评论