






12
Jul
对齐全量微调!这是我看过最精彩的LoRA改进(一)
By 苏剑林 | 2024-07-12 | 48633位读者 | 引用众所周知,LoRA是一种常见的参数高效的微调方法,我们在《梯度视角下的LoRA:简介、分析、猜测及推广》做过简单介绍。LoRA利用低秩分解来降低微调参数量,节省微调显存,同时训练好的权重可以合并到原始权重上,推理架构不需要作出改变,是一种训练和推理都比较友好的微调方案。此外,我们在《配置不同的学习率,LoRA还能再涨一点?》还讨论过LoRA的不对称性,指出给$A,B$设置不同的学习率能取得更好的效果,该结论被称为“LoRA+”。
为了进一步提升效果,研究人员还提出了不少其他LoRA变体,如AdaLoRA、rsLoRA、DoRA、PiSSA等,这些改动都有一定道理,但没有特别让人深刻的地方觉。然而,前两天的《LoRA-GA: Low-Rank Adaptation with Gradient Approximation》,却让笔者眼前一亮,仅扫了摘要就有种必然有效的感觉,仔细阅读后更觉得它是至今最精彩的LoRA改进。
究竟怎么个精彩法?LoRA-GA的实际含金量如何?我们一起来学习一下。
17
Jul
【生活杂记】用电饭锅来煮米汤
By 苏剑林 | 2024-07-17 | 15034位读者 | 引用
29
Jul
对齐全量微调!这是我看过最精彩的LoRA改进(二)
By 苏剑林 | 2024-07-29 | 24272位读者 | 引用前两周笔者写了《对齐全量微调!这是我看过最精彩的LoRA(一)》(当时还没有编号“一”),里边介绍了一个名为“LoRA-GA”的LoRA变体,它通过梯度SVD来改进LoRA的初始化,从而实现LoRA与全量微调的对齐。当然,从理论上来讲,这样做也只能尽量对齐第一步更新后的$W_1$,所以当时就有读者提出了“后面的$W_2,W_3,\cdots$不管了吗?”的疑问,当时笔者也没想太深入,就单纯觉得对齐了第一步后,后面的优化也会严格一条较优的轨迹走。
有趣的是,LoRA-GA才出来没多久,arXiv上就新出了《LoRA-Pro: Are Low-Rank Adapters Properly Optimized?》,其所提的LoRA-Pro正好能回答这个问题!LoRA-Pro同样是想着对齐全量微调,但它对齐的是每一步梯度,从而对齐整条优化轨迹,这正好是跟LoRA-GA互补的改进点。
对齐全量
本文接着上一篇文章的记号和内容进行讲述,所以这里仅对上一节的内容做一个简单回顾,不再详细重复介绍。LoRA的参数化方式是
\begin{equation}W = (W_0 - A_0 B_0) + AB\end{equation}
19
Sep
Softmax后传:寻找Top-K的光滑近似
By 苏剑林 | 2024-09-19 | 25228位读者 | 引用Softmax,顾名思义是“soft的max”,是$\max$算子(准确来说是$\text{argmax}$)的光滑近似,它通过指数归一化将任意向量$\boldsymbol{x}\in\mathbb{R}^n$转化为分量非负且和为1的新向量,并允许我们通过温度参数来调节它与$\text{argmax}$(的one hot形式)的近似程度。除了指数归一化外,我们此前在《通向概率分布之路:盘点Softmax及其替代品》也介绍过其他一些能实现相同效果的方案。
我们知道,最大值通常又称Top-1,它的光滑近似方案看起来已经相当成熟,那读者有没有思考过,一般的Top-$k$的光滑近似又是怎么样的呢?下面让我们一起来探讨一下这个问题。
问题描述
设向量$\boldsymbol{x}=(x_1,x_2,\cdots,x_n)\in\mathbb{R}^n$,简单起见我们假设它们两两不相等,即$i\neq j \Leftrightarrow x_i\neq x_j$。记$\Omega_k(\boldsymbol{x})$为$\boldsymbol{x}$最大的$k$个分量的下标集合,即$|\Omega_k(\boldsymbol{x})|=k$以及$\forall i\in \Omega_k(\boldsymbol{x}), j \not\in \Omega_k(\boldsymbol{x})\Rightarrow x_i > x_j$。我们定义Top-$k$算子$\mathcal{T}_k$为$\mathbb{R}^n\mapsto\{0,1\}^n$的映射:
\begin{equation}
[\mathcal{T}_k(\boldsymbol{x})]_i = \left\{\begin{aligned}1,\,\, i\in \Omega_k(\boldsymbol{x}) \\ 0,\,\, i \not\in \Omega_k(\boldsymbol{x})\end{aligned}\right.
\end{equation}
说白了,如果$x_i$属于最大的$k$个元素之一,那么对应的位置变成1,否则变成0,最终结果是一个Multi-Hot向量,比如$\mathcal{T}_2([3,2,1,4]) = [1,0,0,1]$。
15
Aug
让MathJax更好地兼容谷歌翻译和延时加载
By 苏剑林 | 2024-08-15 | 17648位读者 | 引用很早之前,就有读者提出希望把Cool Papers上面的数学公式渲染一下,因为很多偏数学的论文,它们的摘要甚至标题上都带有LaTeX代码写的数学公式,如果不把这些公式渲染出来,那么看上去就像是一堆乱码,确实会比较影响阅读体验。然而,之前的测试显示,负责渲染公式的MathJax跟谷歌翻译和延时加载都不大兼容,所以尽管需求存在已久,但笔者一直没有把它加上去。
不过好消息是,经过反复查阅和调试,这两天笔者总算把兼容性问题解决了,所以现在大家看到的Cool Papers已经能够渲染数学公式了。这篇文章总结一下解决方案,供大家参考。
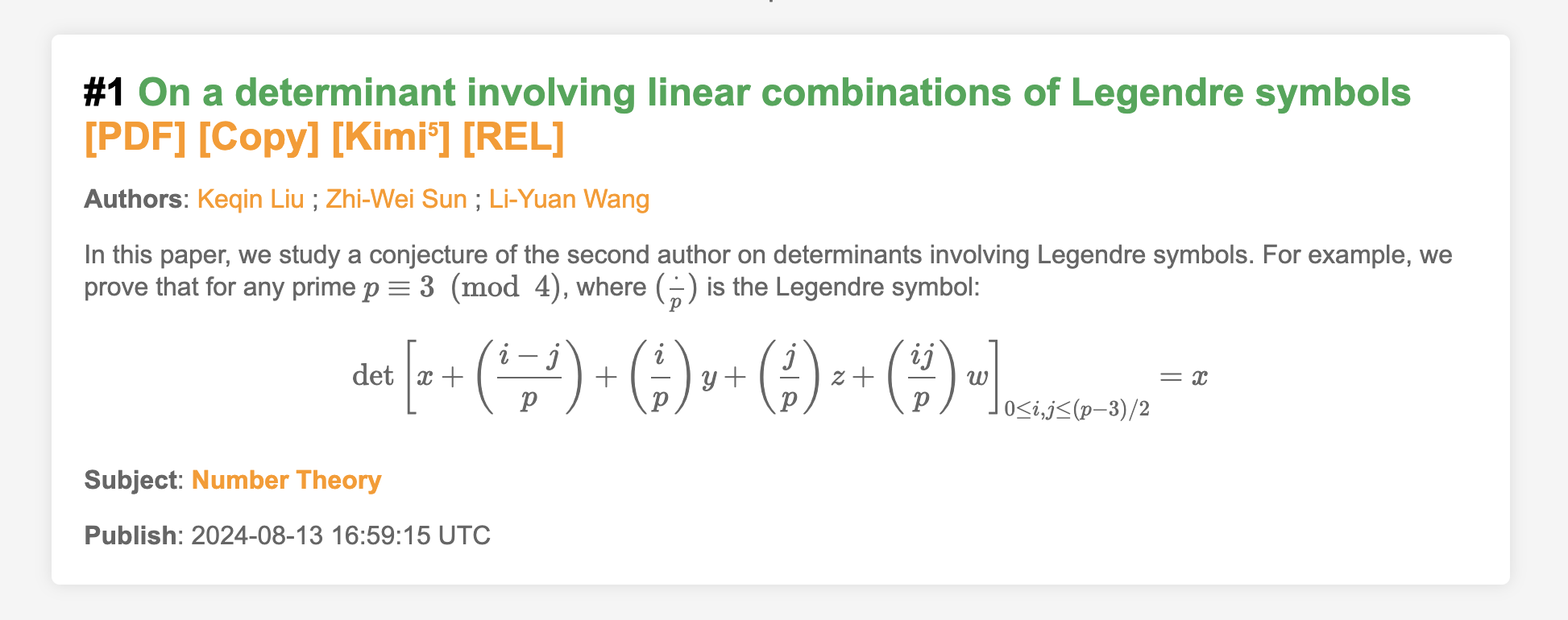
摘要带有公式的论文
1
Oct
低秩近似之路(二):SVD
By 苏剑林 | 2024-10-01 | 16908位读者 | 引用上一篇文章中我们介绍了“伪逆”,它关系到给定矩阵$\boldsymbol{M}$和$\boldsymbol{A}$(或$\boldsymbol{B}$)时优化目标$\Vert \boldsymbol{A}\boldsymbol{B} - \boldsymbol{M}\Vert_F^2$的最优解。这篇文章我们来关注$\boldsymbol{A},\boldsymbol{B}$都不给出时的最优解,即
\begin{equation}\mathop{\text{argmin}}_{\boldsymbol{A},\boldsymbol{B}}\Vert \boldsymbol{A}\boldsymbol{B} - \boldsymbol{M}\Vert_F^2\label{eq:loss-ab}\end{equation}
其中$\boldsymbol{A}\in\mathbb{R}^{n\times r}, \boldsymbol{B}\in\mathbb{R}^{r\times m}, \boldsymbol{M}\in\mathbb{R}^{n\times m},r < \min(n,m)$。说白了,这就是要寻找矩阵$\boldsymbol{M}$的“最优$r$秩近似(秩不超过$r$的最优近似)”。而要解决这个问题,就需要请出大名鼎鼎的“SVD(奇异值分解)”了。虽然本系列把伪逆作为开篇,但它的“名声”远不如SVD,听过甚至用过SVD但没听说过伪逆的应该大有人在,包括笔者也是先了解SVD后才看到伪逆。
接下来,我们将围绕着矩阵的最优低秩近似来展开介绍SVD。
结论初探
对于任意矩阵$\boldsymbol{M}\in\mathbb{R}^{n\times m}$,都可以找到如下形式的奇异值分解(SVD,Singular Value Decomposition):
\begin{equation}\boldsymbol{M} = \boldsymbol{U}\boldsymbol{\Sigma} \boldsymbol{V}^{\top}\end{equation}
6
Sep
“闭门造车”之多模态思路浅谈(三):位置编码
By 苏剑林 | 2024-09-06 | 41684位读者 | 引用在前面的文章中,我们曾表达过这样的观点:多模态LLM相比纯文本LLM的主要差异在于,前者甚至还没有形成一个公认为标准的方法论。这里的方法论,不仅包括之前讨论的生成和训练策略,还包括一些基础架构的设计,比如本文要谈的“多模态位置编码”。
对于这个主题,我们之前在《Transformer升级之路:17、多模态位置编码的简单思考》就已经讨论过一遍,并且提出了一个方案(RoPE-Tie)。然而,当时笔者对这个问题的思考仅处于起步阶段,存在细节考虑不周全、认识不够到位等问题,所以站在现在的角度回看,当时所提的方案与完美答案还有明显的距离。
因此,本文我们将自上而下地再次梳理这个问题,并且给出一个自认为更加理想的结果。
多模位置
多模态模型居然连位置编码都没有形成共识,这一点可能会让很多读者意外,但事实上确实如此。对于文本LLM,目前主流的位置编码是RoPE(RoPE就不展开介绍了,假设读者已经熟知),更准确来说是RoPE-1D,因为原始设计只适用于1D序列。后来我们推导了RoPE-2D,这可以用于图像等2D序列,按照RoPE-2D的思路我们可以平行地推广到RoPE-3D,用于视频等3D序列。
1
Sep
Decoder-only的LLM为什么需要位置编码?
By 苏剑林 | 2024-09-01 | 31455位读者 | 引用众所周知,目前主流的LLM,都是基于Causal Attention的Decoder-only模型(对此我们在《为什么现在的LLM都是Decoder-only的架构?》也有过相关讨论),而对于Causal Attention,已经有不少工作表明它不需要额外的位置编码(简称NoPE)就可以取得非平凡的结果。然而,事实是主流的Decoder-only LLM都还是加上了额外的位置编码,比如RoPE、ALIBI等。
那么问题就来了:明明说了不加位置编码也可以,为什么主流的LLM反而都加上了呢?不是说“多一事不如少一事”吗?这篇文章我们从三个角度给出笔者的看法:
1、位置编码对于Attention的作用是什么?
2、NoPE的Causal Attention是怎么实现位置编码的?
3、NoPE实现的位置编码有什么不足?

最近评论