






22
Apr
GAU-α:尝鲜体验快好省的下一代Attention
By 苏剑林 | 2022-04-22 | 66847位读者 | 引用在《FLASH:可能是近来最有意思的高效Transformer设计》中,我们介绍了GAU(Gated Attention Unit,门控线性单元),在这里笔者愿意称之为“目前最有潜力的下一代Attention设计”,因为它真正达到了“更快(速度)、更好(效果)、更省(显存)”的特点。
然而,有些读者在自己的测试中得到了相反的结果,比如收敛更慢、效果更差等,这与笔者的测试结果大相径庭。本文就来分享一下笔者自己的训练经验,并且放出一个尝鲜版“GAU-α”供大家测试。
GAU-α
首先介绍一下开源出来的“GAU-α”在CLUE任务上的成绩单:
$$\small{\begin{array}{c|ccccccccccc}
\hline
& \text{iflytek} & \text{tnews} & \text{afqmc} & \text{cmnli} & \text{ocnli} & \text{wsc} & \text{csl} & \text{cmrc2018} & \text{c3} & \text{chid} & \text{cluener}\\
\hline
\text{BERT} & 60.06 & 56.80 & 72.41 & 79.56 & 73.93 & 78.62 & 83.93 & 56.17 & 60.54 & 85.69 & 79.45 \\
\text{RoBERTa} & 60.64 & \textbf{58.06} & 74.05 & 81.24 & 76.00 & \textbf{87.50} & 84.50 & 56.54 & 67.66 & 86.71 & 79.47\\
\text{RoFormer} & 60.91 & 57.54 & 73.52 & 80.92 & \textbf{76.07} & 86.84 & 84.63 & 56.26 & 67.24 & 86.57 & 79.72\\
\text{RoFormerV2}^* & 60.87 & 56.54 & 72.75 & 80.34 & 75.36 & 80.92 & 84.67 & 57.91 & 64.62 & 85.09 & \textbf{81.08}\\
\hline
\text{GAU-}\alpha & \textbf{61.41} & 57.76 & \textbf{74.17} & \textbf{81.82} & 75.86 & 79.93 & \textbf{85.67} & \textbf{58.09} & \textbf{68.24} & \textbf{87.91} & 80.01\\
\hline
\end{array}}$$
11
Apr
熵不变性Softmax的一个快速推导
By 苏剑林 | 2022-04-11 | 29535位读者 | 引用在文章《从熵不变性看Attention的Scale操作》中,我们推导了一版具有熵不变性质的注意力机制:
\begin{equation}Attention(Q,K,V) = softmax\left(\frac{\kappa \log n}{d}QK^{\top}\right)V\label{eq:a}\end{equation}
可以观察到,它主要是往Softmax里边引入了长度相关的缩放因子$\log n$来实现的。原来的推导比较繁琐,并且做了较多的假设,不利于直观理解,本文为其补充一个相对简明快速的推导。
推导过程
我们可以抛开注意力机制的背景,直接设有$s_1,s_2,\cdots,s_n\in\mathbb{R}$,定义
$$p_i = \frac{e^{\lambda s_i}}{\sum\limits_{i=1}^n e^{\lambda s_i}}$$
7
Apr
听说Attention与Softmax更配哦~
By 苏剑林 | 2022-04-07 | 117696位读者 | 引用不知道大家留意到一个细节没有,就是当前NLP主流的预训练模式都是在一个固定长度(比如512)上进行,然后直接将预训练好的模型用于不同长度的任务中。大家似乎也没有对这种模式有过怀疑,仿佛模型可以自动泛化到不同长度是一个“理所应当”的能力。
当然,笔者此前同样也没有过类似的质疑,直到前几天笔者做了Base版的GAU实验后才发现GAU的长度泛化能力并不如想象中好。经过进一步分析后,笔者才明白原来这种长度泛化的能力并不是“理所当然”的......
模型回顾
在《FLASH:可能是近来最有意思的高效Transformer设计》中,我们介绍了“门控注意力单元GAU”,它是一种融合了GLU和Attention的新设计。
除了效果,GAU在设计上给我们带来的冲击主要有两点:一是它显示了单头注意力未必就逊色于多头注意力,这奠定了它“快”、“省”的地位;二是它是显示了注意力未必需要Softmax归一化,可以换成简单的$\text{relu}^2$除以序列长度:
\begin{equation}\boldsymbol{A}=\frac{1}{n}\text{relu}^2\left(\frac{\mathcal{Q}(\boldsymbol{Z})\mathcal{K}(\boldsymbol{Z})^{\top}}{\sqrt{s}}\right)=\frac{1}{ns}\text{relu}^2\left(\mathcal{Q}(\boldsymbol{Z})\mathcal{K}(\boldsymbol{Z})^{\top}\right)\end{equation}
29
Mar
为什么Pre Norm的效果不如Post Norm?
By 苏剑林 | 2022-03-29 | 202022位读者 | 引用Pre Norm与Post Norm之间的对比是一个“老生常谈”的话题了,本博客就多次讨论过这个问题,比如文章《浅谈Transformer的初始化、参数化与标准化》、《模型优化漫谈:BERT的初始标准差为什么是0.02?》等。目前比较明确的结论是:同一设置之下,Pre Norm结构往往更容易训练,但最终效果通常不如Post Norm。Pre Norm更容易训练好理解,因为它的恒等路径更突出,但为什么它效果反而没那么好呢?
笔者之前也一直没有好的答案,直到前些时间在知乎上看到 @唐翔昊 的一个回复后才“恍然大悟”,原来这个问题竟然有一个非常直观的理解!本文让我们一起来学习一下。
11
Mar
门控注意力单元(GAU)还需要Warmup吗?
By 苏剑林 | 2022-03-11 | 66318位读者 | 引用在文章《训练1000层的Transformer究竟有什么困难?》发布之后,很快就有读者问到如果将其用到《FLASH:可能是近来最有意思的高效Transformer设计》中的“门控注意力单元(GAU)”,那结果是怎样的?跟标准Transformer的结果有何不同?本文就来讨论这个问题。
先说结论
事实上,GAU是非常容易训练的模型,哪怕我们不加调整地直接使用“Post Norm + Xavier初始化”,也能轻松训练个几十层的GAU,并且还不用Warmup。所以关于标准Transformer的很多训练技巧,到了GAU这里可能就无用武之地了...
为什么GAU能做到这些?很简单,因为在默认设置之下,理论上$\text{GAU}(\boldsymbol{x}_l)$相比$\boldsymbol{x}_l$几乎小了两个数量级,所以
\begin{equation}\boldsymbol{x}_{l+1} = \text{LN}(\boldsymbol{x}_l + \text{GAU}(\boldsymbol{x}_l))\approx \boldsymbol{x}_l\end{equation}
9
Mar
训练1000层的Transformer究竟有什么困难?
By 苏剑林 | 2022-03-09 | 127685位读者 | 引用众所周知,现在的Transformer越做越大,但这个“大”通常是“宽”而不是“深”,像GPT-3虽然参数有上千亿,但也只是一个96层的Transformer模型,与我们能想象的深度相差甚远。是什么限制了Transformer往“深”发展呢?可能有的读者认为是算力,但“宽而浅”的模型所需的算力不会比“窄而深”的模型少多少,所以算力并非主要限制,归根结底还是Transformer固有的训练困难。一般的观点是,深模型的训练困难源于梯度消失或者梯度爆炸,然而实践显示,哪怕通过各种手段改良了梯度,深模型依然不容易训练。
近来的一些工作(如Admin)指出,深模型训练的根本困难在于“增量爆炸”,即模型越深对输出的扰动就越大。上周的论文《DeepNet: Scaling Transformers to 1,000 Layers》则沿着这个思路进行尺度分析,根据分析结果调整了模型的归一化和初始化方案,最终成功训练出了1000层的Transformer模型。整个分析过程颇有参考价值,我们不妨来学习一下。
增量爆炸
原论文的完整分析比较长,而且有些假设或者描述细酌之下是不够合理的。所以在本文的分享中,笔者会尽量修正这些问题,试图以一个更合理的方式来得到类似结果。
25
Feb
FLASH:可能是近来最有意思的高效Transformer设计
By 苏剑林 | 2022-02-25 | 284264位读者 | 引用高效Transformer,泛指所有概率Transformer效率的工作,笔者算是关注得比较早了,最早的博客可以追溯到2019年的《为节约而生:从标准Attention到稀疏Attention》,当时做这块的工作很少。后来,这类工作逐渐多了,笔者也跟进了一些,比如线性Attention、Performer、Nyströmformer,甚至自己也做了一些探索,比如之前的“Transformer升级之路”。再后来,相关工作越来越多,但大多都很无趣,所以笔者就没怎么关注了。
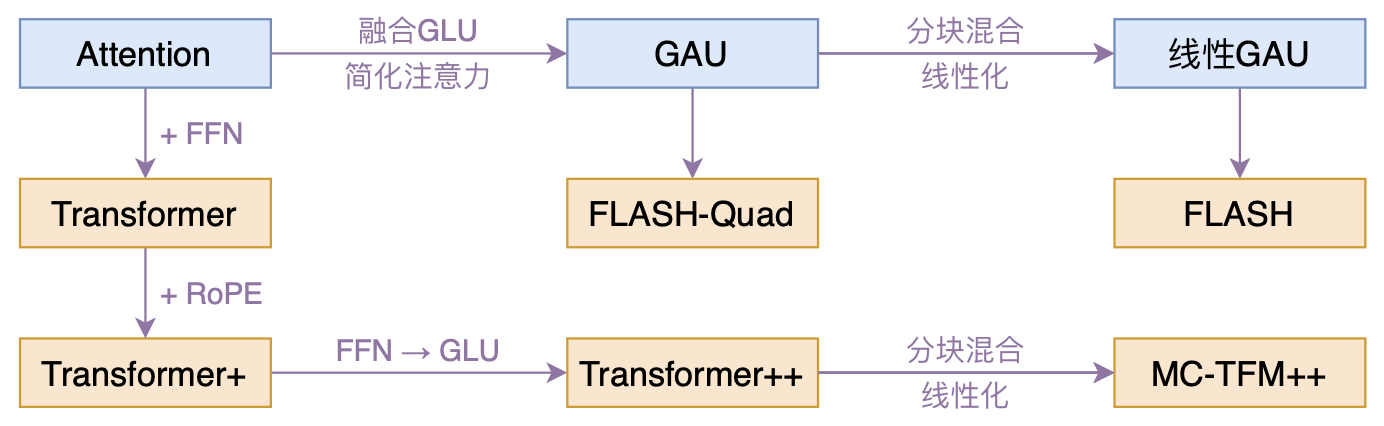
本文模型脉络图
大抵是“久旱逢甘霖”的感觉,最近终于出现了一个比较有意思的高效Transformer工作——来自Google的《Transformer Quality in Linear Time》,经过细读之后,笔者认为论文里边真算得上是“惊喜满满”了~
21
Dec
从熵不变性看Attention的Scale操作
By 苏剑林 | 2021-12-21 | 195807位读者 | 引用当前Transformer架构用的最多的注意力机制,全称为“Scaled Dot-Product Attention”,其中“Scaled”是因为在$Q,K$转置相乘之后还要除以一个$\sqrt{d}$再做Softmax(下面均不失一般性地假设$Q,K,V\in\mathbb{R}^{n\times d}$):
\begin{equation}Attention(Q,K,V) = softmax\left(\frac{QK^{\top}}{\sqrt{d}}\right)V\label{eq:std}\end{equation}
在《浅谈Transformer的初始化、参数化与标准化》中,我们已经初步解释了除以$\sqrt{d}$的缘由。而在这篇文章中,笔者将从“熵不变性”的角度来理解这个缩放操作,并且得到一个新的缩放因子。在MLM的实验显示,新的缩放因子具有更好的长度外推性能。
熵不变性
我们将一般的Scaled Dot-Product Attention改写成
\begin{equation}\boldsymbol{o}_i = \sum_{j=1}^n a_{i,j}\boldsymbol{v}_j,\quad a_{i,j}=\frac{e^{\lambda \boldsymbol{q}_i\cdot \boldsymbol{k}_j}}{\sum\limits_{j=1}^n e^{\lambda \boldsymbol{q}_i\cdot \boldsymbol{k}_j}}\end{equation}
其中$\lambda$是缩放因子,它跟$\boldsymbol{q}_i,\boldsymbol{k}_j$无关,但原则上可以跟长度$n$、维度$d$等参数有关,目前主流的就是$\lambda=1/\sqrt{d}$。

最近评论