






15
Sep
殊途同归的策略梯度与零阶优化
By 苏剑林 | 2020-09-15 | 54625位读者 | 引用深度学习如此成功的一个巨大原因就是基于梯度的优化算法(SGD、Adam等)能有效地求解大多数神经网络模型。然而,既然是基于梯度,那么就要求模型是可导的,但随着研究的深入,我们时常会有求解不可导模型的需求,典型的例子就是直接优化准确率、F1、BLEU等评测指标,或者在神经网络里边加入了不可导模块(比如“跳读”操作)。
Gradient
本文将简单介绍两种求解不可导的模型的有效方法:强化学习的重要方法之一策略梯度(Policy Gradient),以及干脆不需要梯度的零阶优化(Zeroth Order Optimization)。表面上来看,这是两种思路完全不一样的优化方法,但本文将进一步证明,在一大类优化问题中,其实两者基本上是等价的。
13
Nov
也来谈谈RNN的梯度消失/爆炸问题
By 苏剑林 | 2020-11-13 | 87236位读者 | 引用尽管Transformer类的模型已经攻占了NLP的多数领域,但诸如LSTM、GRU之类的RNN模型依然在某些场景下有它的独特价值,所以RNN依然是值得我们好好学习的模型。而对于RNN梯度的相关分析,则是一个从优化角度思考分析模型的优秀例子,值得大家仔细琢磨理解。君不见,诸如“LSTM为什么能解决梯度消失/爆炸”等问题依然是目前流行的面试题之一...
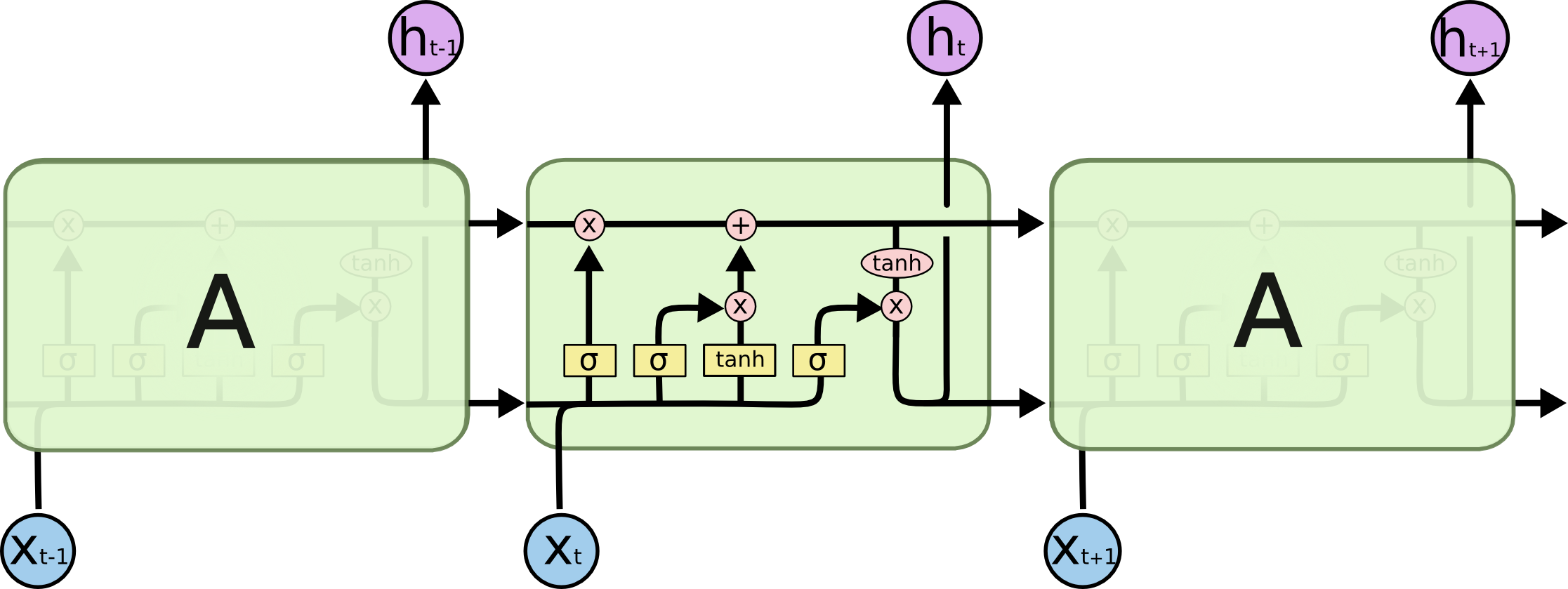
经典的LSTM
关于此类问题,已有不少网友做出过回答,然而笔者查找了一些文章(包括知乎上的部分回答、专栏以及经典的英文博客),发现没有找到比较好的答案:有些推导记号本身就混乱不堪,有些论述过程没有突出重点,整体而言感觉不够清晰自洽。为此,笔者也尝试给出自己的理解,供大家参考。
17
Jun
对比学习可以使用梯度累积吗?
By 苏剑林 | 2021-06-17 | 57816位读者 | 引用在之前的文章《用时间换取效果:Keras梯度累积优化器》中,我们介绍过“梯度累积”,它是在有限显存下实现大batch_size效果的一种技巧。一般来说,梯度累积适用的是loss是独立同分布的场景,换言之每个样本单独计算loss,然后总loss是所有单个loss的平均或求和。然而,并不是所有任务都满足这个条件的,比如最近比较热门的对比学习,每个样本的loss还跟其他样本有关。
那么,在对比学习场景,我们还可以使用梯度累积来达到大batch_size的效果吗?本文就来分析这个问题。
简介
一般情况下,对比学习的loss可以写为
\begin{equation}\mathcal{L}=-\sum_{i,j=1}^b t_{i,j}\log p_{i,j} = -\sum_{i,j=1}^b t_{i,j}\log \frac{e^{s_{i,j}}}{\sum\limits_j e^{s_{i,j}}}=-\sum_{i,j=1}^b t_{i,j}s_{i,j} + \sum_{i=1}^b \log\sum_{j=1}^b e^{s_{i,j}}\label{eq:loss}\end{equation}
这里的$b$是batch_size;$t_{i,j}$是事先给定的标签,满足$t_{i,j}=t_{j,i}$,它是一个one hot矩阵,每一列只有一个1,其余都为0;而$s_{i,j}$是样本$i$和样本$j$的相似度,满足$s_{i,j}=s_{j,i}$,一般情况下还有个温度参数,这里假设温度参数已经整合到$s_{i,j}$中,从而简化记号。模型参数存在于$s_{i,j}$中,假设为$\theta$。
24
Aug
隐藏在动量中的梯度累积:少更新几步,效果反而更好?
By 苏剑林 | 2021-08-24 | 32220位读者 | 引用我们知道,梯度累积是在有限显存下实现大batch_size训练的常用技巧。在之前的文章《用时间换取效果:Keras梯度累积优化器》中,我们就简单介绍过梯度累积的实现,大致的思路是新增一组参数来缓存梯度,最后用缓存的梯度来更新模型。美中不足的是,新增一组参数会带来额外的显存占用。
这几天笔者在思考优化器的时候,突然意识到:梯度累积其实可以内置在带动量的优化器中!带着这个思路,笔者对优化了进行了一些推导和实验,最后还得到一个有意思但又有点反直觉的结论:少更新几步参数,模型最终效果可能会变好!
注:本文下面的结果,几乎原封不动且没有引用地出现在Google的论文《Combined Scaling for Zero-shot Transfer Learning》中,在此不做过多评价,请读者自行品评。
SGDM
在正式讨论之前,我们定义函数
\begin{equation}\chi_{t/k} = \left\{ \begin{aligned}&1,\quad t \equiv 0\,(\text{mod}\, k) \\
&0,\quad t \not\equiv 0\,(\text{mod}\, k)
\end{aligned}\right.\end{equation}
也就是说,$t$是一个整数,当它是$k$的倍数时,$\chi_{t/k}=1$,否则$\chi_{t/k}=0$,这其实就是一个$t$能否被$k$整除的示性函数。在后面的讨论中,我们将反复用到这个函数。
15
Nov
WGAN新方案:通过梯度归一化来实现L约束
By 苏剑林 | 2021-11-15 | 53158位读者 | 引用当前,WGAN主流的实现方式包括参数裁剪(Weight Clipping)、谱归一化(Spectral Normalization)、梯度惩罚(Gradient Penalty),本来则来介绍一种新的实现方案:梯度归一化(Gradient Normalization),该方案出自两篇有意思的论文,分别是《Gradient Normalization for Generative Adversarial Networks》和《GraN-GAN: Piecewise Gradient Normalization for Generative Adversarial Networks》。
有意思在什么地方呢?从标题可以看到,这两篇论文应该是高度重合的,甚至应该是同一作者的。但事实上,这是两篇不同团队的、大致是同一时期的论文,一篇中了ICCV,一篇中了WACV,它们基于同样的假设推出了几乎一样的解决方案,内容重合度之高让我一直以为是同一篇论文。果然是巧合无处不在啊~
22
Nov
ChildTuning:试试把Dropout加到梯度上去?
By 苏剑林 | 2021-11-22 | 64253位读者 | 引用Dropout是经典的防止过拟合的思路了,想必很多读者已经了解过它。有意思的是,最近Dropout有点“老树发新芽”的感觉,出现了一些有趣的新玩法,比如最近引起过热议的SimCSE和R-Drop,尤其是在文章《又是Dropout两次!这次它做到了有监督任务的SOTA》中,我们发现简单的R-Drop甚至能媲美对抗训练,不得不说让人意外。
一般来说,Dropout是被加在每一层的输出中,或者是加在模型参数上,这是Dropout的两个经典用法。不过,最近笔者从论文《Raise a Child in Large Language Model: Towards Effective and Generalizable Fine-tuning》中学到了一种新颖的用法:加到梯度上面。
梯度加上Dropout?相信大部分读者都是没听说过的。那么效果究竟如何呢?让我们来详细看看。
11
Dec
输入梯度惩罚与参数梯度惩罚的一个不等式
By 苏剑林 | 2021-12-11 | 23052位读者 | 引用在本博客中,已经多次讨论过梯度惩罚相关内容了。从形式上来看,梯度惩罚项分为两种,一种是关于输入的梯度惩罚$\Vert\nabla_{\boldsymbol{x}} f(\boldsymbol{x};\boldsymbol{\theta})\Vert^2$,在《对抗训练浅谈:意义、方法和思考(附Keras实现)》、《泛化性乱弹:从随机噪声、梯度惩罚到虚拟对抗训练》等文章中我们讨论过,另一种则是关于参数的梯度惩罚$\Vert\nabla_{\boldsymbol{\theta}} f(\boldsymbol{x};\boldsymbol{\theta})\Vert^2$,在《从动力学角度看优化算法(五):为什么学习率不宜过小?》、《我们真的需要把训练集的损失降低到零吗?》等文章我们讨论过。
在相关文章中,两种梯度惩罚都声称有着提高模型泛化性能的能力,那么两者有没有什么联系呢?笔者从Google最近的一篇论文《The Geometric Occam's Razor Implicit in Deep Learning》学习到了两者的一个不等式,算是部分地回答了这个问题,并且感觉以后可能用得上,在此做个笔记。
最终结果
假设有一个$l$层的MLP模型,记为
\begin{equation}\boldsymbol{h}^{(t+1)} = g^{(t)}(\boldsymbol{W}^{(t)}\boldsymbol{h}^{(t)}+\boldsymbol{b}^{(t)})\end{equation}
其中$g^{(t)}$是当前层的激活函数,$t\in\{1,2,\cdots,l\}$,并记$\boldsymbol{h}^{(1)}$为$\boldsymbol{x}$,即模型的原始输入,为了方便后面的推导,我们记$\boldsymbol{z}^{(t+1)}=\boldsymbol{W}^{(t)}\boldsymbol{h}^{(t)}+\boldsymbol{b}^{(t)}$;参数全体为$\boldsymbol{\theta}=\{\boldsymbol{W}^{(1)},\boldsymbol{b}^{(1)},\boldsymbol{W}^{(2)},\boldsymbol{b}^{(2)},\cdots,\boldsymbol{W}^{(l)},\boldsymbol{b}^{(l)}\}$。设$f$是$\boldsymbol{h}^{(l+1)}$的任意标量函数,那么成立不等式
\begin{equation}\Vert\nabla_{\boldsymbol{x}} f\Vert^2\left(\frac{1 + \Vert \boldsymbol{h}^{(1)}\Vert^2}{\Vert\boldsymbol{W}^{(1)}\Vert^2 \Vert\nabla_{\boldsymbol{x}}\boldsymbol{h}^{(1)}\Vert^2}+\cdots+\frac{1 + \Vert \boldsymbol{h}^{(l)}\Vert^2}{\Vert\boldsymbol{W}^{(l)}\Vert^2 \Vert\nabla_{\boldsymbol{x}}\boldsymbol{h}^{(l)}\Vert^2}\right)\leq \Vert\nabla_{\boldsymbol{\theta}} f\Vert^2\label{eq:f}\end{equation}
8
Feb
多任务学习漫谈(二):行梯度之事
By 苏剑林 | 2022-02-08 | 50427位读者 | 引用在《多任务学习漫谈(一):以损失之名》中,我们从损失函数的角度初步探讨了多任务学习问题,最终发现如果想要结果同时具有缩放不变性和平移不变性,那么用梯度的模长倒数作为任务的权重是一个比较简单的选择。我们继而分析了,该设计等价于将每个任务的梯度单独进行归一化后再相加,这意味着多任务的“战场”从损失函数转移到了梯度之上:看似在设计损失函数,实则在设计更好的梯度,所谓“以损失之名,行梯度之事”。
那么,更好的梯度有什么标准呢?如何设计出更好的梯度呢?本文我们就从梯度的视角来理解多任务学习,试图直接从设计梯度的思路出发构建多任务学习算法。
整体思路
我们知道,对于单任务学习,常用的优化方法就是梯度下降,那么它是怎么推导的呢?同样的思路能不能直接用于多任务学习呢?这便是这一节要回答的问题。

最近评论