






26
Mar
GELU的两个初等函数近似是怎么来的
By 苏剑林 | 2020-03-26 | 52269位读者 | 引用GELU,全称为Gaussian Error Linear Unit,也算是RELU的变种,是一个非初等函数形式的激活函数。它由论文《Gaussian Error Linear Units (GELUs)》提出,后来被用到了GPT中,再后来被用在了BERT中,再再后来的不少预训练语言模型也跟着用到了它。随着BERT等预训练语言模型的兴起,GELU也跟着水涨船高,莫名其妙地就成了热门的激活函数了。
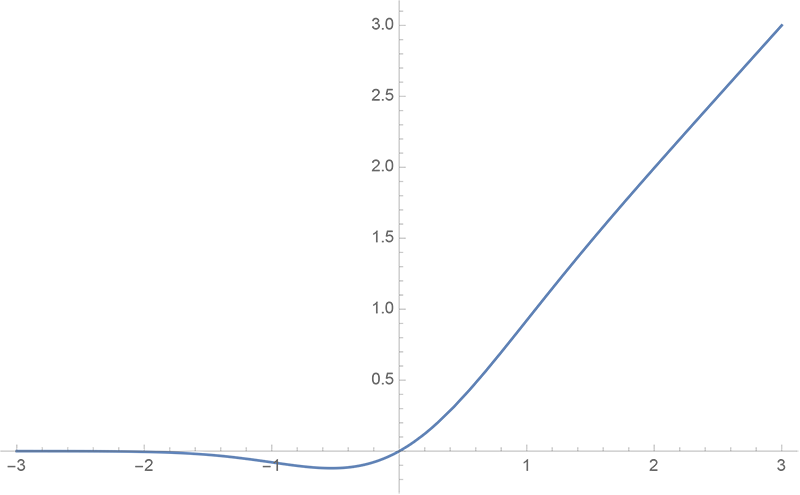
gelu函数图像
在GELU的原始论文中,作者不仅提出了GELU的精确形式,还给出了两个初等函数的近似形式,本文来讨论它们是怎么得到的。
20
Apr
EAE:自编码器 + BN + 最大熵 = 生成模型
By 苏剑林 | 2020-04-20 | 59045位读者 | 引用生成模型一直是笔者比较关注的主题,不管是NLP和CV的生成模型都是如此。这篇文章里,我们介绍一个新颖的生成模型,来自论文《Batch norm with entropic regularization turns deterministic autoencoders into generative models》,论文中称之为EAE(Entropic AutoEncoder)。它要做的事情给变分自编码器(VAE)基本一致,最终效果其实也差不多(略优),说它新颖并不是它生成效果有多好,而是思路上的新奇,颇有别致感。此外,借着这个机会,我们还将学习一种统计量的估计方法——$k$邻近方法,这是一种很有用的非参数估计方法。
自编码器vs生成模型
普通的自编码器是一个“编码-解码”的重构过程,如下图所示:
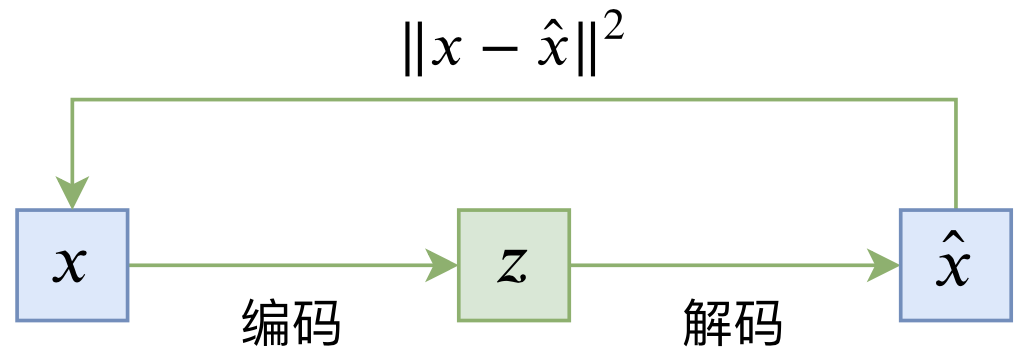
典型自编码器示意图
其loss一般为
\begin{equation}L_{AE} = \mathbb{E}_{x\sim \tilde{p}(x)}\left[\left\Vert x - \hat{x}\right\Vert^2\right] = \mathbb{E}_{x\sim \tilde{p}(x)}\left[\left\Vert x - D(E(x))\right\Vert^2\right]\end{equation}
29
Apr
节省显存的重计算技巧也有了Keras版了
By 苏剑林 | 2020-04-29 | 49946位读者 | 引用不少读者最近可能留意到了公众号文章《BERT重计算:用22.5%的训练时间节省5倍的显存开销(附代码)》,里边介绍了一个叫做“重计算”的技巧,简单来说就是用来省显存的方法,让平均训练速度慢一点,但batch_size可以增大好几倍。该技巧首先发布于论文《Training Deep Nets with Sublinear Memory Cost》,其实在2016年就已经提出了,只不过似乎还没有特别流行起来。
探索
公众号文章提到该技巧在pytorch和paddlepaddle都有原生实现了,但tensorflow还没有。但事实上从tensorflow 1.8开始,tensorflow就已经自带了该功能了,当时被列入了tf.contrib这个子库中,而从tensorflow 1.15开始,它就被内置为tensorflow的主函数之一,那就是tf.recompute_grad。
找到tf.recompute_grad之后,笔者就琢磨了一下它的用法,经过一番折腾,最终居然真的成功地用起来了,居然成功地让batch_size从48增加到了144!然而,在继续整理测试的过程中,发现这玩意居然在tensorflow 2.x是失效的...于是再折腾了两天,查找了各种资料并反复调试,最终算是成功地补充了这一缺陷。
最后是笔者自己的开源实现:
该实现已经内置在bert4keras中,使用bert4keras的读者可以升级到最新版本(0.7.5+)来测试该功能。
11
May
AdaX优化器浅析(附开源实现)
By 苏剑林 | 2020-05-11 | 34490位读者 | 引用这篇文章简单介绍一个叫做AdaX的优化器,来自《AdaX: Adaptive Gradient Descent with Exponential Long Term Memory》。介绍这个优化器的原因是它再次印证了之前在《AdaFactor优化器浅析(附开源实现)》一文中提到的一个结论,两篇文章可以对比着阅读。
Adam & AdaX
AdaX的更新格式是
\begin{equation}\left\{\begin{aligned}&g_t = \nabla_{\theta} L(\theta_t)\\
&m_t = \beta_1 m_{t-1} + \left(1 - \beta_1\right) g_t\\
&v_t = (1 + \beta_2) v_{t-1} + \beta_2 g_t^2\\
&\hat{v}_t = v_t\left/\left(\left(1 + \beta_2\right)^t - 1\right)\right.\\
&\theta_t = \theta_{t-1} - \alpha_t m_t\left/\sqrt{\hat{v}_t + \epsilon}\right.
\end{aligned}\right.\end{equation}
其中$\beta_2$的默认值是$0.0001$。对了,顺便附上自己的Keras实现:https://github.com/bojone/adax
13
May
从EMD、WMD到WRD:文本向量序列的相似度计算
By 苏剑林 | 2020-05-13 | 60035位读者 | 引用在NLP中,我们经常要去比较两个句子的相似度,其标准方法是想办法将句子编码为固定大小的向量,然后用某种几何距离(欧氏距离、$\cos$距离等)作为相似度。这种方案相对来说比较简单,而且检索起来比较快速,一定程度上能满足工程需求。
此外,还可以直接比较两个变长序列的差异性,比如编辑距离,它通过动态规划找出两个字符串之间的最优映射,然后算不匹配程度;现在我们还有Word2Vec、BERT等工具,可以将文本序列转换为对应的向量序列,所以也可以直接比较这两个向量序列的差异,而不是先将向量序列弄成单个向量。
后一种方案速度相对慢一点,但可以比较得更精细一些,并且理论比较优雅,所以也有一定的应用场景。本文就来简单介绍一下属于后者的两个相似度指标,分别简称为WMD、WRD。
Earth Mover's Distance
本文要介绍的两个指标都是以Wasserstein距离为基础,这里会先对它做一个简单的介绍,相关内容也可以阅读笔者旧作《从Wasserstein距离、对偶理论到WGAN》。Wasserstein距离也被形象地称之为“推土机距离”(Earth Mover's Distance,EMD),因为它可以用一个“推土”的例子来通俗地表达它的含义。
1
Jun
泛化性乱弹:从随机噪声、梯度惩罚到虚拟对抗训练
By 苏剑林 | 2020-06-01 | 98585位读者 | 引用提高模型的泛化性能是机器学习致力追求的目标之一。常见的提高泛化性的方法主要有两种:第一种是添加噪声,比如往输入添加高斯噪声、中间层增加Dropout以及进来比较热门的对抗训练等,对图像进行随机平移缩放等数据扩增手段某种意义上也属于此列;第二种是往loss里边添加正则项,比如$L_1, L_2$惩罚、梯度惩罚等。本文试图探索几种常见的提高泛化性能的手段的关联。
随机噪声
我们记模型为$f(x)$,$\mathcal{D}$为训练数据集合,$l(f(x), y)$为单个样本的loss,那么我们的优化目标是
\begin{equation}\mathop{\text{argmin}}_{\theta} L(\theta)=\mathbb{E}_{(x,y)\sim \mathcal{D}}[l(f(x), y)]\end{equation}
$\theta$是$f(x)$里边的可训练参数。假如往模型输入添加噪声$\varepsilon$,其分布为$q(\varepsilon)$,那么优化目标就变为
\begin{equation}\mathop{\text{argmin}}_{\theta} L_{\varepsilon}(\theta)=\mathbb{E}_{(x,y)\sim \mathcal{D}, \varepsilon\sim q(\varepsilon)}[l(f(x + \varepsilon), y)]\end{equation}
当然,可以添加噪声的地方不仅仅是输入,也可以是中间层,也可以是权重$\theta$,甚至可以是输出$y$(等价于标签平滑),噪声也不一定是加上去的,比如Dropout是乘上去的。对于加性噪声来说,$q(\varepsilon)$的常见选择是均值为0、方差固定的高斯分布;而对于乘性噪声来说,常见选择是均匀分布$U([0,1])$或者是伯努利分布。
添加随机噪声的目的很直观,就是希望模型能学会抵御一些随机扰动,从而降低对输入或者参数的敏感性,而降低了这种敏感性,通常意味着所得到的模型不再那么依赖训练集,所以有助于提高模型泛化性能。
23
Jun
从采样看优化:可导优化与不可导优化的统一视角
By 苏剑林 | 2020-06-23 | 57207位读者 | 引用不少读者都应该知道,损失函数与评测指标的不一致性是机器学习的典型现象之一,比如分类问题中损失函数用交叉熵,评测指标则是准确率或者F1,又比如文本生成中损失函数是teacher-forcing形式的交叉熵,评测指标则是BLEU、ROUGE等。理想情况下,当然是评测什么指标,我们就去优化这个指标,然而评测指标通常都是不可导的,而我们多数都是使用基于梯度的优化器,这就要求最小化的目标必须是可导的,这是不一致性的来源。
前些天在arxiv刷到了一篇名为《MLE-guided parameter search for task loss minimization in neural sequence modeling》的论文,顾名思义,它是研究如何直接优化文本生成的评测指标的。经过阅读,笔者发现这篇论文很有价值,事实上它提供了一种优化评测指标的新思路,适用范围并不局限于文本生成中。不仅如此,它甚至还包含了一种理解可导优化与不可导优化的统一视角。
采样视角
首先,我们可以通过采样的视角来重新看待优化问题:设模型当前参数为$\theta$,优化目标为$l(\theta)$,我们希望决定下一步的更新量$\Delta\theta$,为此,我们先构建分布
\begin{equation}p(\Delta\theta|\theta)=\frac{e^{-[l(\theta + \Delta\theta) - l(\theta)]/\alpha}}{Z(\theta)},\quad Z(\theta) = \int e^{-[l(\theta + \Delta\theta) - l(\theta)]/\alpha} d(\Delta\theta)\end{equation}
28
Jun
积分梯度:一种新颖的神经网络可视化方法
By 苏剑林 | 2020-06-28 | 92554位读者 | 引用本文介绍一种神经网络的可视化方法:积分梯度(Integrated Gradients),它首先在论文《Gradients of Counterfactuals》中提出,后来《Axiomatic Attribution for Deep Networks》再次介绍了它,两篇论文作者都是一样的,内容也大体上相同,后一篇相对来说更易懂一些,如果要读原论文的话,建议大家优先读后一篇。当然,它已经是2016~2017年间的工作了,“新颖”说的是它思路上的创新有趣,而不是指最近发表。
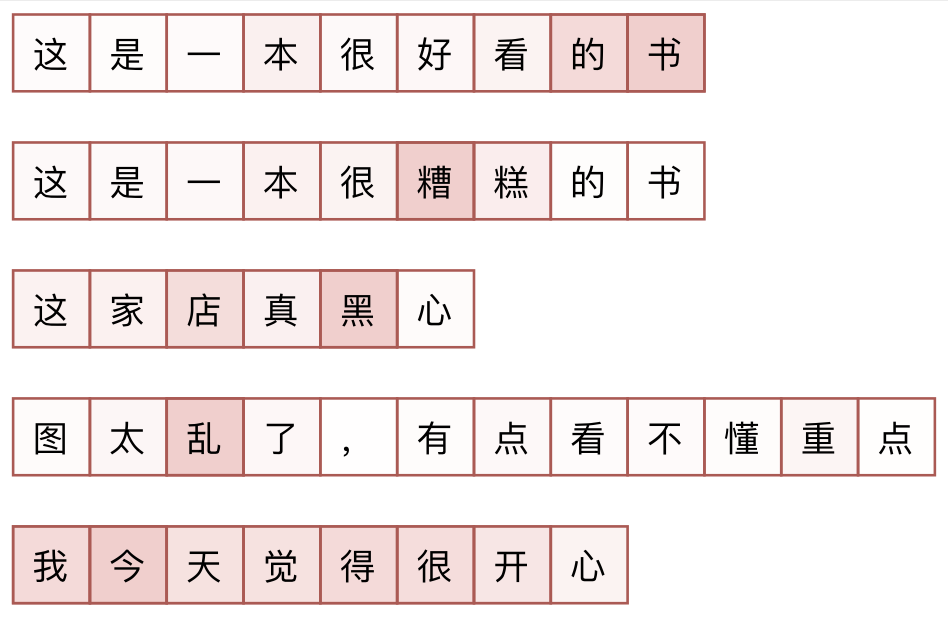
笔者在中文情感分类上对积分梯度的实验效果(越红的token越重要)
所谓可视化,简单来说就是对于给定的输入$x$以及模型$F(x)$,我们想办法指出$x$的哪些分量对模型的决策有重要影响,或者说对$x$各个分量的重要性做个排序,用专业的话术来说那就是“归因”。一个朴素的思路是直接使用梯度$\nabla_x F(x)$来作为$x$各个分量的重要性指标,而积分梯度是对它的改进。然而,笔者认为,很多介绍积分梯度方法的文章(包括原论文),都过于“生硬”(形式化),没有很好地突出积分梯度能比朴素梯度更有效的本质原因。本文试图用自己的思路介绍一下积分梯度方法。

最近评论