






28
Dec
矩阵描述三维空间旋转
By 苏剑林 | 2013-12-28 | 87327位读者 | 引用本节简单介绍用矩阵来描述旋转。在二维平面上,复数无疑是描述旋转的最佳工具;然而推广到三维空间中,却要动用到“四元数”了。为了证明四元数的相关结论,我们需要三维旋转的矩阵描述。最一般的旋转运动为:绕某一根轴旋转$\theta$角度。这样我们就需要三个参数来描述它:确定一根轴至少需要两个参数,确定角度需要一个参数。因此,如果要用“数”来描述三维空间的伸缩和旋转的话,“三元数”显然是不够的,完成这一目的至少需要四元数。这也从另外一个角度反映了三元数的不存在性。
矩阵方法
首先我们认识到,如果旋转轴是坐标轴之一,那么旋转矩阵将是最简单的,比如向量$\boldsymbol{x}=(x_0,y_0,z_0)^{T}$绕$z$轴逆时针旋转$\theta$角后的坐标就可以描述为
$$\begin{equation}
\boldsymbol{R}_{\theta}\boldsymbol{x}\end{equation}$$
29
Dec
有质动力:倒立单摆的稳定性
By 苏剑林 | 2013-12-29 | 49374位读者 | 引用
11
Jan
几何的数与数的几何:超复数的浅探究
By 苏剑林 | 2014-01-11 | 58620位读者 | 引用这也是我的期末论文之一...全文共17页,包括了四元数的构造方法,初等应用等。附录包括行列式与体积、三维旋转的描述等。使用LaTex进行写作(LaTex会让你爱上数学写作的)
几何的数与数的几何
――超复数的浅探究
摘要
今天,不论是数学还是物理的高维问题,都采用向量分析为基本工具,数学物理中难觅四元数的影子。然而在历史上,四元数的发展有着重要的意义。四元数(Quaternion)运算实际上是向量分析的“鼻祖”,向量点积和叉积的概念也首先出现在四元数的运算中,四元数的诞生还标记着非交换代数的开端。即使是现在,四元数还是计算机描述三维空间旋转问题最简单的工具。另外,作为复数的推广,四元数还为某些复数问题的一般化提供了思路。
本文把矩阵与几何适当地结合起来,利用矩阵行列式$\det (AB) =(\det A)(\det B)$这一性质得出了四元数以及更高维的超复数的生成规律,并讨论了它的一些性质以及它在描述旋转方面的应用。部分证明细节和不完善的思想放到了附录之中。
7
Feb
视频演示:费曼的茶杯
By 苏剑林 | 2014-02-07 | 18881位读者 | 引用
27
Jun
Project Euler 454 :五天攻下“擂台”
By 苏剑林 | 2014-06-27 | 28469位读者 | 引用进入期末了,很多同学都开始复习了,这学期我选的几门课到现在还不是很熟悉,本想也在趁着这段时间好好看看。偏生五天前我在浏览数学研发论坛的编程擂台时看到了这样的一道题目:
设对于给定的$L$,方程
$$\frac{1}{x}+\frac{1}{y}=\frac{1}{n}$$
满足$0 < x < y \leq L$的正整数解共有$f(L)$种情况。比如$f(6)=1,f(12)=3,f(1000)=1069$,求$f(10^{12})$。
这道题目的来源是Project Euler的第454题:Diophantine reciprocals III(丢潘图倒数方程),题目简短易懂,但又不失深度,正符合我对理想题目的定义。而且最近在学习Python学习得不亦乐乎,看到这道题目就跃跃欲试。于是乎,我的五天时间就没有了,而且过程中几乎耗尽了我现在懂的所有编程技巧。由于不断地测试运行,我的电脑发热量比平时大了几倍,真是辛苦了我的电脑。最后的代码,自我感觉已经是我目前写的最精彩的代码了。在此与大家共享和共勉~
上述表达式是分式,不利于编程,由于$n=\frac{xy}{x+y}$,于是上述题目也等价于求$(x+y)|xy$(意思是$x+y$整除$xy$)的整数解。
在查找量子化有关资料的时候,笔者查找到了一系列名为《漫谈几何量子化》的文章,并进一步查询得知,作者为季候风,原来发表在繁星客栈(顺便提一下,繁星客栈是最早的理论物理论坛之一,现在已经不能发帖了,但是上面很多资料都弥足珍贵),据说这是除正则量子化和路径积分量子化外的第三种量子化方法。网上鲜有几何量子化的资料,更不用说是中文资料了,于是季候风前辈的这一十五篇文章便显得格外有意义了。
然而,虽然不少网站都转载了这系列文章,但是无一例外地,文章中的公式图片已经失效了,后来笔者在百度网盘那找到其中的十四篇pdf格式的(估计是网友在公式图片失效前保存下来的),笔者通过替换公式服务器的方式找回了第十五篇,把第十五篇也补充进去了。(见漫谈几何量子化(原文档).zip)
虽然这样已经面前能够阅读了,但是总感觉美中不足,虽然笔者花了三天时间把文章重新用$\LaTeX$录入了,主要是把公式重新录入了,简单地排版了一下。现放出来与大家分享。
在学车的时候,我堂大哥曾问我一道作圆的问题:
三圆的外切圆和内切圆 (1)
平面上给出三个两两相切的圆以及它们的圆心,求作一个圆与这三个圆都相切(尺规作图)。
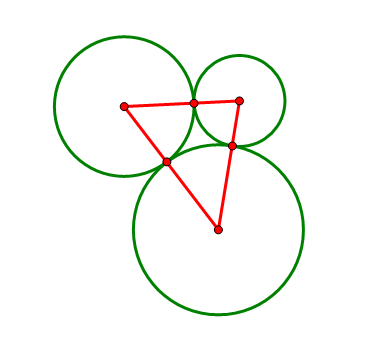
如果从纯几何的途径入手,我们甚至很难判断这样的圆是否存在。但是我之前似乎已经看过类似的题目,于是很快想到一个名词:反演。反演可以将圆反演成直线(圆过反演点),也可以将圆反演成圆(圆不过反演点),而其他的相切、相交等关系保持不变。对反演后的图形进行相同的反演,就变回原来的图形。本题的难点在于圆太多,利用反演,我们可以将它变为两条直线和一个圆的问题。
假设读者已经有了反演的基本知识,如果没有,请到
http://zh.wikipedia.org/wiki/反演
阅读相关内容。
在讨论了倒立单摆的相关分析之后,胡雄大哥(笔者的一位好友)提出了一个问题:一根均匀杆,当然质量不可忽略,只有一个力(简单起见,可以先假设为恒力)作用在其中一个点上(简单起见,可以假设为端点),那么杆是怎么运动的?
其实笔者学了不少的经典力学,也分析了不少问题,但就是对于力矩、角动量等还是模模糊糊的,对于我来说,大多数经典力学问题就是“作用量+变分”,本题也不例外。为了让题目的实验意义更加明确,不妨将题目改成:
一根中性的均匀杆,它的一个端点带有一个点电荷,那么它(仅仅)在一个均匀电场中的运动是怎样的?
在这里,我们进一步简化,只考虑平面问题。杆属于刚体,为了描述杆的运动,我们需要描述杆上一点的运动,以及杆绕这一点的转动,也就是说,即使只考虑平面的情况,该系统也是有三个自由度的。设杆的带电荷那一端点的坐标为$(x,y)$,为了描述杆的转动,以这一端点为中心建立极坐标系,设杆的极角为$\theta$。设电势的函数为$U(x,y)$,因为只有一点带电(受力),因此势能是简单的。

最近评论