






18
Jun
当Bert遇上Keras:这可能是Bert最简单的打开姿势
By 苏剑林 | 2019-06-18 | 356072位读者 | 引用Bert是什么,估计也不用笔者来诸多介绍了。虽然笔者不是很喜欢Bert,但不得不说,Bert确实在NLP界引起了一阵轩然大波。现在不管是中文还是英文,关于Bert的科普和解读已经满天飞了,隐隐已经超过了当年Word2Vec刚出来的势头了。有意思的是,Bert是Google搞出来的,当年的word2vec也是Google搞出来的,不管你用哪个,都是在跟着Google大佬的屁股跑啊~
Bert刚出来不久,就有读者建议我写个解读,但我终究还是没有写。一来,Bert的解读已经不少了,二来其实Bert也就是基于Attention的搞出来的大规模语料预训练的模型,本身在技术上不算什么创新,而关于Google的Attention我已经写过解读了,所以就提不起劲来写了。
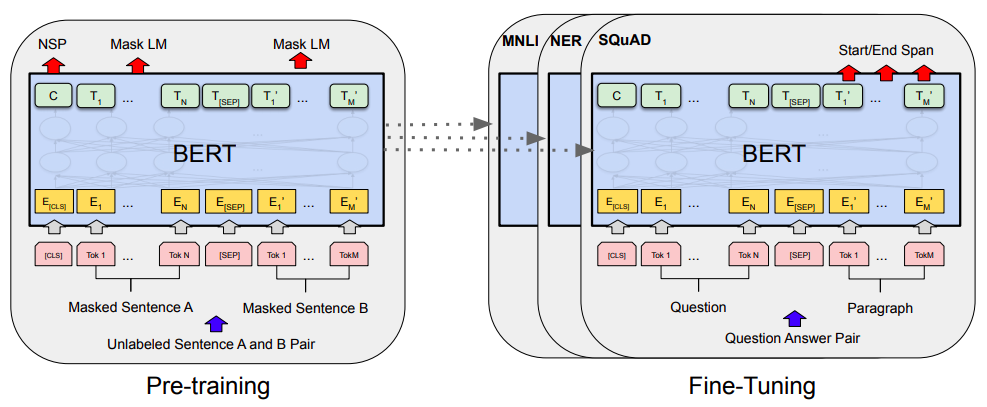
Bert的预训练和微调(图片来自Bert的原论文)
总的来说,我个人对Bert一直也没啥兴趣,直到上个月末在做信息抽取比赛时,才首次尝试了Bert。因为后来想到,即使不感兴趣,终究也是得学会它,毕竟用不用是一回事,会不会又是另一回事。再加上在Keras中使用(fine tune)Bert,似乎还没有什么文章介绍,所以就分享一下自己的使用经验。
11
Dec
从动力学角度看优化算法(六):为什么SimSiam不退化?
By 苏剑林 | 2020-12-11 | 62645位读者 | 引用自SimCLR以来,CV中关于无监督特征学习的工作层出不穷,让人眼花缭乱。这些工作大多数都是基于对比学习的,即通过适当的方式构造正负样本进行分类学习的。然而,在众多类似的工作中总有一些特立独行的研究,比如Google的BYOL和最近的SimSiam,它们提出了单靠正样本就可以完成特征学习的方案,让人觉得耳目一新。但是没有负样本的支撑,模型怎么不会退化(坍缩)为一个没有意义的常数模型呢?这便是这两篇论文最值得让人思考和回味的问题了。
其中SimSiam给出了让很多人都点赞的答案,但笔者觉得SimSiam也只是把问题换了种说法,并没有真的解决这个问题。笔者认为,像SimSiam、GAN等模型的成功,很重要的原因是使用了基于梯度的优化器(而非其他更强或者更弱的优化器),所以不结合优化动力学的答案都是不完整的。在这里,笔者尝试结合动力学来分析SimSiam不会退化的原因。
SimSiam
在看SimSiam之前,我们可以先看看BYOL,来自论文《Bootstrap your own latent: A new approach to self-supervised Learning》,其学习过程很简单,就是维护两个编码器Student和Teacher,其中Teacher是Student的滑动平均,Student则又反过来向Teacher学习,有种“左脚踩右脚”就可以飞起来的感觉。示意图如下:
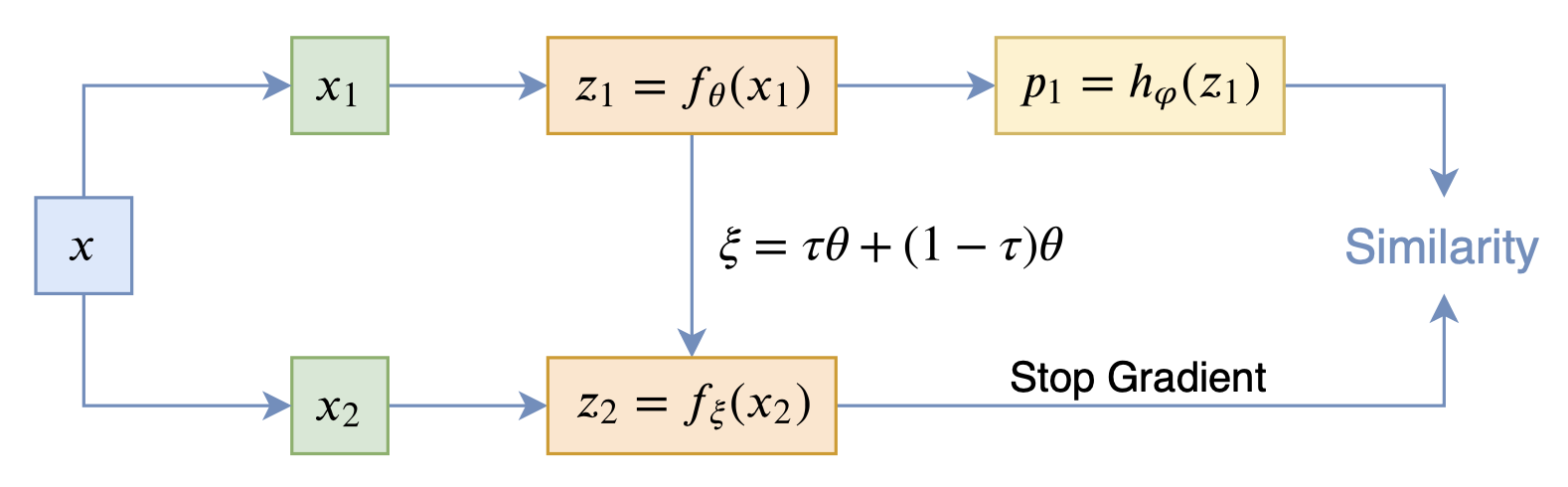
BYOL示意图
8
Nov
模型优化漫谈:BERT的初始标准差为什么是0.02?
By 苏剑林 | 2021-11-08 | 73125位读者 | 引用前几天在群里大家讨论到了“Transformer如何解决梯度消失”这个问题,答案有提到残差的,也有提到LN(Layer Norm)的。这些是否都是正确答案呢?事实上这是一个非常有趣而综合的问题,它其实关联到挺多模型细节,比如“BERT为什么要warmup?”、“BERT的初始化标准差为什么是0.02?”、“BERT做MLM预测之前为什么还要多加一层Dense?”,等等。本文就来集中讨论一下这些问题。
梯度消失说的是什么意思?
在文章《也来谈谈RNN的梯度消失/爆炸问题》中,我们曾讨论过RNN的梯度消失问题。事实上,一般模型的梯度消失现象也是类似,它指的是(主要是在模型的初始阶段)越靠近输入的层梯度越小,趋于零甚至等于零,而我们主要用的是基于梯度的优化器,所以梯度消失意味着我们没有很好的信号去调整优化前面的层。
12
Jan
CoSENT(二):特征式匹配与交互式匹配有多大差距?
By 苏剑林 | 2022-01-12 | 72015位读者 | 引用一般来说,文本匹配有交互式(Interaction-based)和特征式(Representation-based)两种实现方案,其中交互式是指将两个文本拼接在一起当成单文本进行分类,而特征式则是指两个句子分别由编码器编码为句向量后再做简单的融合处理(算cos值或者接一个浅层网络)。通常的结论是,交互式由于使得两个文本能够进行充分的比较,所以它准确性通常较好,但明显的缺点是在检索场景的效率较差;而特征式则可以提前计算并缓存好句向量,所以它有着较高的效率,但由于句子间的交互程度较浅,所以通常效果不如交互式。
上一篇文章笔者介绍了CoSENT,它本质上也是一种特征式方案,并且相比以往的特征式方案效果有所提高。于是笔者的好胜心就上来了:CoSENT能比得过交互式吗?特征式相比交互式的差距有多远呢?本文就来做个比较。
自动阈值
在文章《CoSENT(一):比Sentence-BERT更有效的句向量方案》中,我们评测CoSENT所用的指标是Spearman系数,它是一个只依赖于预测结果相对顺序的指标,不依赖于阈值,比较适合检索场景的评测。但如果评测指标是accuracy或者F1这些分类指标,则必须确定一个阈值,将预测结果大于这个数的预测结果视为正、小于则为负,然后才能计算指标。在二分类的场景,我们用二分法就可以有效地确定这个阈值。
8
Feb
多任务学习漫谈(二):行梯度之事
By 苏剑林 | 2022-02-08 | 41537位读者 | 引用在《多任务学习漫谈(一):以损失之名》中,我们从损失函数的角度初步探讨了多任务学习问题,最终发现如果想要结果同时具有缩放不变性和平移不变性,那么用梯度的模长倒数作为任务的权重是一个比较简单的选择。我们继而分析了,该设计等价于将每个任务的梯度单独进行归一化后再相加,这意味着多任务的“战场”从损失函数转移到了梯度之上:看似在设计损失函数,实则在设计更好的梯度,所谓“以损失之名,行梯度之事”。
那么,更好的梯度有什么标准呢?如何设计出更好的梯度呢?本文我们就从梯度的视角来理解多任务学习,试图直接从设计梯度的思路出发构建多任务学习算法。
整体思路
我们知道,对于单任务学习,常用的优化方法就是梯度下降,那么它是怎么推导的呢?同样的思路能不能直接用于多任务学习呢?这便是这一节要回答的问题。
30
Aug
生成扩散模型漫谈(九):条件控制生成结果
By 苏剑林 | 2022-08-30 | 90981位读者 | 引用前面的几篇文章都是比较偏理论的结果,这篇文章我们来讨论一个比较有实用价值的主题——条件控制生成。
作为生成模型,扩散模型跟VAE、GAN、flow等模型的发展史很相似,都是先出来了无条件生成,然后有条件生成就紧接而来。无条件生成往往是为了探索效果上限,而有条件生成则更多是应用层面的内容,因为它可以实现根据我们的意愿来控制输出结果。从DDPM至今,已经出来了很多条件扩散模型的工作,甚至可以说真正带火了扩散模型的就是条件扩散模型,比如脍炙人口的文生图模型DALL·E 2、Imagen。
在这篇文章中,我们对条件扩散模型的理论基础做个简单的学习和总结。
技术分析
从方法上来看,条件控制生成的方式分两种:事后修改(Classifier-Guidance)和事前训练(Classifier-Free)。
在上一篇文章中,我们已经得到了电偶极子的等势面和电场线方程,这应该可以让我们对电偶极子的力场情况有个大致的了解了。当然,我们还是希望能够求出在这样的一个受力情况下,一个带电粒子是如何运动的。简单起见,在下面的探讨中,我们假定带电粒子的质量和电荷量均为1,至于电荷的正负,可以通过改变在$U=-\frac{k \cos\theta}{r^2}$中的k值的正负来控制。我们使用的工具依旧是理论力学中的欧拉-拉格朗日方程。
也许不少读者始终对公式感到头疼,更不用说是博大精深的理论力学了。但是请相信我,如果你花一点点心思去弄懂用变分法研究力学(或其他物理系统,但我目前只会用于力学)的基本思路和步骤,那么对你的物理研究是大有裨益的。因为在我眼中,学习了一丁点的理论力学知识后,我看到的只有物理的简洁与和谐。有兴趣的朋友可以看看我的那几篇《自然极值》等相关文章。
首先写出动能的表达式:$T=\frac{1}{2} (\dot{r}^2+r^2 \dot{\theta}^2)$
还有势能:$U=-\frac{k \cos\theta}{r^2}$
3
Feb
关于“平衡态公理”的更正与思考
By 苏剑林 | 2013-02-03 | 17818位读者 | 引用在《自然极值》系列文章中,我引用了《数学方法论与解题研究》(张雄,李得虎编著)中提到的“平衡态公理”,并用它来解决了一些数学物理问题。平衡态公理讲的是系统的平衡状态总是在势能取极(小)值时取到,简单来讲就是自然界总向势能更低的方向发展,比如“水往低处流”。这在经典力学中本身是没有任何问题的,但在有些时候,我们在应用的时候可能会不自觉地将它想象成为“系统的平衡状态总是在总能量取极(小)值时取到”。然而,这却是不正确的。本文就是要探讨这个问题。
先来看看平衡态公理的来源。从最小作用量原理出发,考虑保守系统,每一个系统都应该对应着一个取极值的作用量S:
$$S=\int_{t_1}^{t_2} L(x,\dot{x})dt$$

最近评论