






3
May
从动力学角度看优化算法(四):GAN的第三个阶段
By 苏剑林 | 2019-05-03 | 136170位读者 |在对GAN的学习和思考过程中,我发现我不仅学习到了一种有效的生成模型,而且它全面地促进了我对各种模型各方面的理解,比如模型的优化和理解视角、正则项的意义、损失函数与概率分布的联系、概率推断等等。GAN不单单是一个“造假的玩具”,而是具有深刻意义的概率模型和推断方法。
作为事后的总结,我觉得对GAN的理解可以粗糙地分为三个阶段:
1、样本阶段:在这个阶段中,我们了解了GAN的“鉴别者-造假者”诠释,懂得从这个原理出发来写出基本的GAN公式(如原始GAN、LSGAN),比如判别器和生成器的loss,并且完成简单GAN的训练;同时,我们知道GAN有能力让图片更“真”,利用这个特性可以把GAN嵌入到一些综合模型中。
2、分布阶段:在这个阶段中,我们会从概率分布及其散度的视角来分析GAN,典型的例子是WGAN和f-GAN,同时能基本理解GAN的训练困难问题,比如梯度消失和mode collapse等,甚至能基本地了解变分推断,懂得自己写出一些概率散度,继而构造一些新的GAN形式。
3、动力学阶段:在这个阶段中,我们开始结合优化器来分析GAN的收敛过程,试图了解GAN是否能真的达到理论的均衡点,进而理解GAN的loss和正则项等因素如何影响的收敛过程,由此可以针对性地提出一些训练策略,引导GAN模型到达理论均衡点,从而提高GAN的效果。
事实上,不仅仅是GAN,对于一般的模型理解,也可以大致上分为这三个阶段。当然也许有热衷于几何解释或其他诠释的读者会不同意第二点,觉得没必要非得概率分布的角度来理解。但事实上几何视角和概率视角都有一定的相通之处,而本文所写的三个阶段只是一个粗糙的总结,简单来说就是从局部到整体,然后再到优化器。
而本文主要聚焦于GAN的第三个阶段:GAN的动力学。
基本原理 #
一般情况下,GAN可以表示为一个min-max过程,记作
\begin{equation}\min_G \max_D L(G,D)\end{equation}
其中$\max\limits_D L(G,D)$这一步定义了一个概率散度而$\min\limits_G$这一步则在最小化散度,相关的讨论也可以参考本网站的《f-GAN简介:GAN模型的生产车间》和《不用L约束又不会梯度消失的GAN,了解一下?》。
注意,从理论上讲,这个min-max过程是有序的,即需要彻底地、精确地完成$\max\limits_D$这一步,然后才去$\min\limits_G$。但是很显然,实际训练GAN时我们做不到这一点,我们都是$D,G$交替训练的,理想情况下我们还希望$D,G$每次只各自训练一次,这样训练效率最高,而这样的训练方法对应于一个动力系统。
动力系统 #
在我们的“从动力学角度看优化算法”系列中,我们将梯度下降看成是在数学求解动力系统(也就是一个常微分方程组,简称ODEs)
\begin{equation}\dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})\end{equation}
其中$L(\boldsymbol{\theta})$是模型的loss,而$\boldsymbol{\theta}$是模型的参数。如果考虑随机性,那么则需要加上一个噪声项,变成一个随机微分方程,但本文我们不考虑随机性,这不影响我们对局部收敛性的分析。假定读者已经熟悉了这种转换,下面就来讨论GAN对应的过程。
GAN是一个min-max的过程,换句话说,一边是梯度下降,另一边是梯度上升,假设$\boldsymbol{\varphi}$是判别器的参数,$\boldsymbol{\theta}$是生成器的参数,那么GAN对应的动力系统是
\begin{equation}\begin{pmatrix}\dot{\boldsymbol{\varphi}}\\ \dot{\boldsymbol{\theta}}\end{pmatrix} = \begin{pmatrix} \nabla_{\boldsymbol{\varphi}} L(\boldsymbol{\varphi},\boldsymbol{\theta})\\ - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\varphi},\boldsymbol{\theta})\end{pmatrix}\end{equation}
当然,对于更一般的GAN,有时候两个$L$会稍微不一样:
\begin{equation}\begin{pmatrix}\dot{\boldsymbol{\varphi}}\\ \dot{\boldsymbol{\theta}}\end{pmatrix} = \begin{pmatrix} \nabla_{\boldsymbol{\varphi}} L_1(\boldsymbol{\varphi},\boldsymbol{\theta})\\ - \nabla_{\boldsymbol{\theta}} L_2(\boldsymbol{\varphi},\boldsymbol{\theta})\end{pmatrix}\end{equation}
不管是哪一种,右端两项都是一正一负,而就是因为这一正一负的差异,导致了GAN训练上的困难~我们下面就逐步认识到这一点。
相关工作 #
将GAN的优化过程视为一个(随机)动力系统,基于这个观点进行研究分析的文献已有不少,我读到的包括《The Numerics of GANs》、《GANs Trained by a Two Time-Scale Update Rule Converge to a Local Nash Equilibrium》、《Gradient descent GAN optimization is locally stable》、《Which Training Methods for GANs do actually Converge?》,而本文只不过是前辈大牛们的工作的一个学习总结。
在这几篇文献中,大家可能比较熟悉的是第二篇,因为就是第二篇提出了TTUR的GAN训练策略以及提出了FID作为GAN的性能指标,而这篇论文的理论基础也是将GAN的优化看成前述的随机动力系统,然后引用了随机优化中的一个定理,得出可以给生成器和判别器分别使用不同的学习率(TTUR)。而其余几篇,都是直接将GAN的优化看成确定性的动力系统(ODEs),然后用分析ODEs的方法来分析GAN。由于ODEs的理论分析/数值求解都说得上相当成熟,因此可以直接将很多ODEs的结论用到GAN中。
Dirac GAN #
本文的思路和结果主要参考《Which Training Methods for GANs do actually Converge?》,这篇论文的主要贡献如下:
1、提出了Dirac GAN的概念,借助它可以快速地对GAN的性态有个基本的认识;
2、完整地分析了带零中心梯度惩罚的WGAN(也是WGAN-div)的局部收敛性;
3、利用零中心梯度惩罚的WGAN训练了1024的人脸、256的LSUN生成,并且不需要像PGGAN那样渐进式训练。
由于实验设备限制,第三点我们难以复现,而第二点涉及到比较复杂的理论分析,我们也不作过多讨论,有兴趣攻克的读者直接读原论文即可。本文主要关心第一点:Dirac GAN。
所谓Dirac GAN,就是考虑真样本分布只有一个样本点的情况下,待研究的GAN模型的表现。假设真实样本点是零向量$\boldsymbol{0}$,而假样本为$\boldsymbol{\theta}$,其实它也代表着生成器的参数;而判别器采用最简单的线性模型,即(加激活函数之前)为$D(\boldsymbol{x})=\boldsymbol{x}\cdot \boldsymbol{\varphi}$,其中$\boldsymbol{\varphi}$代表着判别器的参数。Dirac GAN就是考虑这样的一个极简模型下,假样本最终能否收敛到真样本,也就是说$\boldsymbol{\theta}$最终能否收敛到$\boldsymbol{0}$。
然而,原论文只考虑了样本点的维度是一维的情形,即$\boldsymbol{0},\boldsymbol{\theta},\boldsymbol{\varphi}$都是标量,但本文后面的案例表明,对于某些例子,一维Dirac GAN不足以揭示它的收敛性态,一般情况下至少需要2维Dirac GAN才能较好地分析一个GAN的渐近收敛性。
常见GAN分析 #
上一节我们给出了Dirac GAN的基本概念,指出它可以帮助我们对GAN的收敛性态有个快速的认识。在这部分内容中,我们通过分析若干常见GAN,来更详细地表明Dirac GAN怎么做到这一点。
Vanilla GAN #
Vanilla GAN,或者叫做原始GAN、标准GAN,它就是指Goodfellow最早提出来的GAN,它有saturating和non-saturating两种形式。作为例子,我们来分析比较常用的non-saturating形式:
\begin{equation}\begin{aligned}&\min_D \mathbb{E}_{\boldsymbol{x}\sim p(\boldsymbol{x})}[-\log D(\boldsymbol{x})]+\mathbb{E}_{\boldsymbol{x}\sim q(\boldsymbol{x})}[-\log (1-D(\boldsymbol{x}))]\\
&\min_G \mathbb{E}_{\boldsymbol{z}\sim q(\boldsymbol{z})}[-\log D(G(\boldsymbol{z}))]
\end{aligned}\end{equation}
这里的$p(\boldsymbol{x}),q(\boldsymbol{x})$分别是真假样本分布,而$q(\boldsymbol{z})$是噪声分布,$D(\boldsymbol{x})$用sigmoid激活。对应到Dirac GAN下,那就简单得多,因为真样本只有一个点而且为$\boldsymbol{0}$,所以判别器的loss只有一项,而判别器可以完全写出为$\boldsymbol{\theta}\cdot \boldsymbol{\varphi}$,其中$\boldsymbol{\theta}$也就是假样本,或者说生成器,最终结果是:
\begin{equation}\begin{aligned}&\min_{\boldsymbol{\varphi}} -\log (1-\sigma(\boldsymbol{\theta}\cdot \boldsymbol{\varphi}))\\
&\min_{\boldsymbol{\theta}} -\log \sigma(\boldsymbol{\theta}\cdot \boldsymbol{\varphi})
\end{aligned}\end{equation}
对应的动力系统是:
\begin{equation}\begin{pmatrix}\dot{\boldsymbol{\varphi}}\\ \dot{\boldsymbol{\theta}}\end{pmatrix} = \begin{pmatrix} \nabla_{\boldsymbol{\varphi}} \log (1-\sigma(\boldsymbol{\theta}\cdot \boldsymbol{\varphi}))\\ \nabla_{\boldsymbol{\theta}} \log \sigma(\boldsymbol{\theta}\cdot \boldsymbol{\varphi})\end{pmatrix} = \begin{pmatrix} - \sigma(\boldsymbol{\theta}\cdot \boldsymbol{\varphi}) \boldsymbol{\theta}\\ (1 - \sigma(\boldsymbol{\theta}\cdot \boldsymbol{\varphi}))\boldsymbol{\varphi}\end{pmatrix}\end{equation}
这个动力系统的均衡点(让右端直接等于0)是$\boldsymbol{\varphi}=\boldsymbol{\theta}=\boldsymbol{0}$,也就是假样本变成了真样本。但问题是从一个初始点出发,该初始点最终能否收敛到均衡点却是个未知数。
数值求解的non-saturating的Dirac GAN的优化轨迹(二维情形),可以发现它确实只是在均衡点(红色点)周围振荡,不收敛
为了做出判断,我们假设系统已经跑到了均衡点附近,即$\boldsymbol{\varphi}\approx \boldsymbol{0}, \boldsymbol{\theta}\approx \boldsymbol{0}$,那么可以近似地线性展开:
\begin{equation}\begin{pmatrix}\dot{\boldsymbol{\varphi}}\\ \dot{\boldsymbol{\theta}}\end{pmatrix} = \begin{pmatrix} - \sigma(\boldsymbol{\theta}\cdot \boldsymbol{\varphi}) \boldsymbol{\theta}\\ (1 - \sigma(\boldsymbol{\theta}\cdot \boldsymbol{\varphi}))\boldsymbol{\varphi}\end{pmatrix} \approx \begin{pmatrix} - \boldsymbol{\theta} / 2\\ \boldsymbol{\varphi} / 2\end{pmatrix}\end{equation}
最终近似地有
\begin{equation}\ddot{\boldsymbol{\theta}}\approx - \boldsymbol{\theta} / 4\end{equation}
学过常微分方程的同学都知道,这是最简单的线性常微分方程之一,只要初始值不是$\boldsymbol{0}$,那么它的解是一个周期解,也就是说并不会出现$\boldsymbol{\theta}\to \boldsymbol{0}$的特性。换句话说,对于non-saturating的Vanilla GAN,哪怕模型的初始化已经相当接近均衡点了,但是它始终不会收敛到均衡点,而是在均衡点附近振荡。数值模拟的结果则进一步证明了这一点。
事实上,类似的结果出现在任何形式的f-GAN中,即以f散度为基础的所有GAN都存在同样的问题(不计正则项),即它们会慢慢收敛到均衡点附近,最终都只是在均衡点附近振荡,无法完全收敛到均衡点。
这里再重复一下逻辑:我们知道系统的理论均衡点确实是我们想要的,但是从任意一个初值(相当于模型的初始化)出发,经过迭代后最终是否能跑到理论均衡点(相当于理想地完成GAN的训练),这无法很显然地得到结果,至少需要在均衡点附近做线性展开,分析它的收敛性,这就是说所谓的局部渐近收敛性态。
WGAN #
f-GAN败下阵来了,那WGAN又如何呢?它又能否收敛到理想的均衡点呢?
WGAN的一般形式是
\begin{equation}\min_G \max_{D, \Vert D\Vert_L\leq 1} \mathbb{E}_{\boldsymbol{x}\sim p(\boldsymbol{x})}[D(\boldsymbol{x})] - \mathbb{E}_{\boldsymbol{z}\sim q(\boldsymbol{z})}[D(G(\boldsymbol{z}))]\end{equation}
对应到Dirac GAN,$D(\boldsymbol{x})=\boldsymbol{x}\cdot \boldsymbol{\varphi}$,而$\Vert D\Vert_L\leq 1$可以由$\Vert \boldsymbol{\varphi}\Vert=1$来保证($\Vert\cdot\Vert$是$l_2$模长),换言之,$D(\boldsymbol{x})$加上L约束后为$D(\boldsymbol{x})=\boldsymbol{x}\cdot \boldsymbol{\varphi} / \Vert\boldsymbol{\varphi}\Vert$,那么WGAN对应的Dirac GAN为
\begin{equation}\min_{\boldsymbol{\theta}}\max_{\boldsymbol{\varphi}} \frac{-\boldsymbol{\theta}\cdot \boldsymbol{\varphi}}{\Vert\boldsymbol{\varphi}\Vert}\end{equation}
对应的动力系统是:
\begin{equation}\begin{pmatrix}\dot{\boldsymbol{\varphi}}\\ \dot{\boldsymbol{\theta}}\end{pmatrix} = \begin{pmatrix} \nabla_{\boldsymbol{\varphi}} (-\boldsymbol{\theta}\cdot \boldsymbol{\varphi} / \Vert \boldsymbol{\varphi}\Vert)\\ \nabla_{\boldsymbol{\theta}} (\boldsymbol{\theta}\cdot \boldsymbol{\varphi} / \Vert \boldsymbol{\varphi}\Vert)\end{pmatrix} = \begin{pmatrix} -\boldsymbol{\theta} / \Vert \boldsymbol{\varphi}\Vert + (\boldsymbol{\theta}\cdot \boldsymbol{\varphi})\boldsymbol{\varphi} / \Vert \boldsymbol{\varphi}\Vert^3\\ \boldsymbol{\varphi} / \Vert \boldsymbol{\varphi}\Vert\end{pmatrix}\end{equation}
我们主要关心$\boldsymbol{\theta}$是否会趋于$\boldsymbol{0}$,可以引入类似前一节的线性展开,但是由于$\Vert \boldsymbol{\varphi}\Vert$在分母,所以讨论起来会比较困难。最干脆的方法是直接数值求解这个方程组,结果如下图:
数值求解的WGAN对应的Dirac GAN的优化轨迹(二维情形),可以发现它确实只是在均衡点(红色点)周围振荡,不收敛
可以看到,结果依然是在均衡点附近振荡,并没能够达到均衡点。这个结果表明了,WGAN(同时自然也包括了谱归一化)都没有局部收敛性,哪怕已经跑到了均衡点附近,依然无法准确地落在均衡点上。
(注:稍加分析就能得出,如果只考虑一维的Dirac GAN,那么将无法分析本节的WGAN和后面的GAN-QP,这就是只考虑一维情形的局限性。)
WGAN-GP #
大家可能会疑惑,前面不是讨论了WGAN了吗,怎么还要讨论WGAN-GP?
事实上,从优化角度看,前面所说的WGAN和WGAN-GP是两类不一样的模型。前面的WGAN是指事先在判别器上加上L约束(比如谱归一化),然后进行对抗学习;这里的WGAN-GP指的是判别器不加L约束,而是通过梯度惩罚项(Gradient Penalty)来迫使判别器具有L约束。这里讨论的梯度惩罚有两种,第一种是《Improved Training of Wasserstein GANs》提出来的“以1为中心的梯度惩罚”,第二种是《Wasserstein Divergence for GANs》、《Which Training Methods for GANs do actually Converge?》等文章提倡的“以0为中心的梯度惩罚”。下面我们会对比这两种梯度惩罚的不同表现。
梯度惩罚的一般形式是:
\begin{equation}\begin{aligned}&\min_{D} \mathbb{E}_{\boldsymbol{x}\sim q(\boldsymbol{x})}[D(\boldsymbol{x})] - \mathbb{E}_{\boldsymbol{x}\sim p(\boldsymbol{x})}[D(\boldsymbol{x})] + \lambda \mathbb{E}_{\boldsymbol{x}\sim r(\boldsymbol{x})}\left[(\left\Vert\nabla_{\boldsymbol{x}}D(\boldsymbol{x})\right\Vert - c)^2\right]\\
&\min_{G} \mathbb{E}_{\boldsymbol{z}\sim q(\boldsymbol{z})}[-D(G(\boldsymbol{z}))] \end{aligned}\end{equation}
其中$c=0$或$c=1$,而$r(\boldsymbol{x})$是$p(\boldsymbol{x})$和$q(\boldsymbol{x})$的某个衍生分布,一般直接取真样本分布、假样本分布或者真假样本插值。
对于Dirac GAN来说:
\begin{equation}\nabla_{\boldsymbol{x}}D(\boldsymbol{x}) = \nabla_{\boldsymbol{x}}(\boldsymbol{x}\cdot\boldsymbol{\varphi})=\boldsymbol{\varphi}\end{equation}
也就是说它跟$\boldsymbol{x}$没关系,所以$r(\boldsymbol{x})$怎么取都不影响结果了。因此,WGAN-GP版本的Dirac GAN形式为:
\begin{equation}\begin{aligned}&\min_{\boldsymbol{\varphi}} \boldsymbol{\theta}\cdot\boldsymbol{\varphi} + \lambda (\left\Vert \boldsymbol{\varphi}\right\Vert - c)^2\\
&\min_{\boldsymbol{\theta}} -\boldsymbol{\theta}\cdot\boldsymbol{\varphi}\end{aligned}\end{equation}
对应的动力系统是:
\begin{equation}\begin{pmatrix}\dot{\boldsymbol{\varphi}}\\ \dot{\boldsymbol{\theta}}\end{pmatrix} = \begin{pmatrix} \nabla_{\boldsymbol{\varphi}} (-\boldsymbol{\theta}\cdot\boldsymbol{\varphi} - \lambda (\left\Vert \boldsymbol{\varphi}\right\Vert - c)^2)\\ \nabla_{\boldsymbol{\theta}} (\boldsymbol{\theta}\cdot\boldsymbol{\varphi})\end{pmatrix} = \begin{pmatrix} -\boldsymbol{\theta} - 2\lambda (1 - c / \Vert \boldsymbol{\varphi}\Vert) \boldsymbol{\varphi} \\ \boldsymbol{\varphi} \end{pmatrix}\end{equation}
下面我们分别观察$c=0,c=1$时$\boldsymbol{\theta}$是否会趋于$\boldsymbol{0}$,当$c=0$时其实只是一个线性常微分方程组,可以解析求解,但$c=1$时比较复杂,因此简单起见,我们还是直接用数值求解的方式:
数值求解的WGAN-GP(c=0)对应的Dirac GAN的优化轨迹(二维情形),可以发现它能够渐近收敛到均衡点(红色点)

数值求解的WGAN-GP(c=1)对应的Dirac GAN的优化轨迹(二维情形),可以发现它确实只是在均衡点(红色点)周围振荡,不收敛
上图是在同样的初始条件(初始化)下,$c=0,c=1$的梯度惩罚的不同表现,两图的其他参数都一样。可以看到,加入“以1为中心的梯度惩罚”后,Dirac GAN并没有渐近收敛到原点,反而只是收敛到一个圆上;而加入“以0为中心的梯度惩罚”则可以达到这个目的。这说明早期提出的梯度惩罚项确实是存在一些缺陷的,而“以0为中心的梯度惩罚”在收敛性态上更好。尽管上述仅仅对Dirac GAN做了分析,但结论具有代表性,因为关于0中心的梯度惩罚的优越性的一般证明在《Which Training Methods for GANs do actually Converge?》中已经给出,并得到实验验证。
GAN-QP #
最后来分析一下自己提出的GAN-QP表现如何。相比WGAN-GP,GAN-QP用二次型的差分惩罚项替换了梯度惩罚,并补充了一些证明。相比梯度惩罚,差分惩罚的最主要优势是计算速度更快。
GAN-QP可以有多种形式,一种基本形式是:
\begin{equation}\begin{aligned}&\min_{D} \mathbb{E}_{\boldsymbol{x}_r\sim p(\boldsymbol{x}_r),\boldsymbol{x}_f\sim q(\boldsymbol{x}_f)}\left[D(\boldsymbol{x}_f) - D(\boldsymbol{x}_r) + \frac{(D(\boldsymbol{x}_f) - D(\boldsymbol{x}_r))^2}{2\lambda \Vert \boldsymbol{x}_f - \boldsymbol{x}_r\Vert}\right]\\
&\min_{G} \mathbb{E}_{\boldsymbol{z}\sim q(\boldsymbol{z})}[-D(G(\boldsymbol{z}))] \end{aligned}\end{equation}
对应的Dirac GAN为
\begin{equation}\begin{aligned}&\min_{\boldsymbol{\varphi}} \boldsymbol{\theta}\cdot\boldsymbol{\varphi} + \frac{(\boldsymbol{\theta}\cdot\boldsymbol{\varphi})^2}{2\lambda \Vert \boldsymbol{\theta}\Vert}\\
&\min_{\boldsymbol{\theta}} -\boldsymbol{\theta}\cdot\boldsymbol{\varphi}\end{aligned}\end{equation}
对应的动力系统是:
\begin{equation}\begin{pmatrix}\dot{\boldsymbol{\varphi}}\\ \dot{\boldsymbol{\theta}}\end{pmatrix} = \begin{pmatrix} \nabla_{\boldsymbol{\varphi}} (-\boldsymbol{\theta}\cdot\boldsymbol{\varphi} - (\boldsymbol{\theta}\cdot\boldsymbol{\varphi})^2 / (2\lambda \Vert \boldsymbol{\theta}\Vert))\\ \nabla_{\boldsymbol{\theta}} (\boldsymbol{\theta}\cdot\boldsymbol{\varphi})\end{pmatrix} = \begin{pmatrix} -\boldsymbol{\theta} - (\boldsymbol{\theta}\cdot\boldsymbol{\varphi})\boldsymbol{\theta}/(\lambda \Vert \boldsymbol{\theta}\Vert)\\ \boldsymbol{\varphi} \end{pmatrix}\end{equation}
数值结果如下图(第一个图像):
数值求解的GAN-QP对应的Dirac GAN的优化轨迹(二维情形),可以发现它确实只是在均衡点(红色点)周围振荡,不收敛
数值求解的带有L2正则项的GAN-QP版本的Dirac GAN,其他条件一样,仅加入了L2正则,这表明适当的L2正则项有可能诱导收敛
很遗憾,同大多数GAN一样,GAN-QP也是振荡的。
缓解策略 #
通过上面的分析,我们得到的结论是:目前零中心的WGAN-GP(或者称为WGAN-div)的理论性质最好,只有它是局部收敛的,其余的GAN变体都一定的振荡性,无法真正做到渐近收敛。当然,实际情况可能复杂得多,Dirac GAN的结论只能一定程度上说明问题,带来一个直观感知。
那么,如果Dirac GAN的结论具有代表性的话(即多数GAN实际情况下都难以真正收敛,而是在均衡点附近振荡),我们应该如何缓解这个问题呢?
L2正则项 #
第一个方案是考虑往(任意GAN的)判别器的权重加入L2正则项。综上所述,零中心的梯度惩罚确实很好,但无奈梯度惩罚太慢,如果不愿意加梯度惩罚,那么可以考虑加入L2正则项。
直观上看,GAN在均衡点附近陷入振荡,达到一种动态平衡(周期解,而不是静态解),而L2正则项会迫使判别器的权重向零移动,从而有可能打破这种平衡,如上图中的第二个图像。在我自己的GAN实验中,往判别器加入一个轻微的L2正则项,能使得模型收敛更稳定,效果也有轻微提升。(当然,正则项的权重需要根据模型来调整好。)
权重滑动平均 #
事实上,缓解这个问题最有力的技巧,当属权重滑动平均(EMA)。
权重滑动平均的基本概念,我们在《“让Keras更酷一些!”:中间变量、权重滑动和安全生成器》已经介绍过。对于GAN上的应用,其实不难理解,因为可以观察到,尽管多数GAN最终都是在振荡,但它们振荡中心就是均衡点!所以解决方法很简单,直接将振荡的轨迹上的点平均一下,得到近似的振荡中心,然后就得到了一个更接近均衡点(也就是更高质量)的解!
权重滑动平均带来的提升是非常可观的,如下图比较了有无权重滑动平均时,O-GAN的生成效果图:

没有权重滑动平均时的随机生成效果

权重滑动平均的衰减率为0.999时的随机生成效果

权重滑动平均的衰减率为0.9999时的随机生成效果
可以看到,权重滑动平均几乎给生成效果带来了质的提升。衰减率越大,所得到的生成结果越平滑,但同时会丧失一些细节;衰减率越小,保留的细节越多,但自然也可能保留了额外的噪声。现在主流的GAN都使用了权重滑动平均,衰减率一般为0.999。
顺便说一下,在普通的监督训练模型中,权重滑动平均一般也能带来收敛速度的提升,比如下图是有/无权重滑动平均时,ResNet20模型在cifar10上的训练曲线,全程采用Adam优化器训练,学习率恒为0.001,权重滑动平均的衰减率为0.9999:
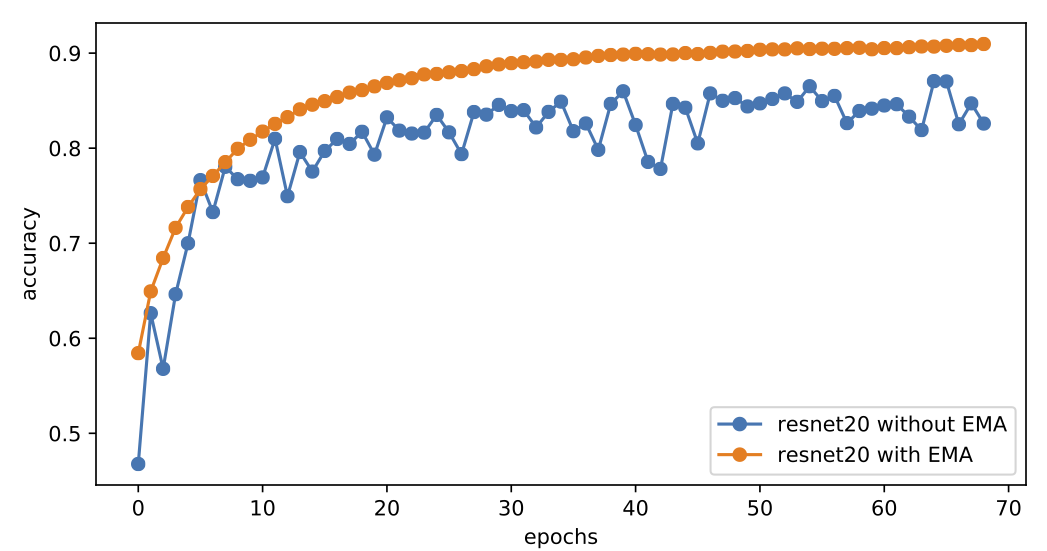
有无EMA时Adam默认学习率训练ResNet20的表现
可以看到,加上权重滑动平均之后,模型以一种非常平稳、快速的姿态收敛到90%+的准确率,而不加的话模型准确率一直在86%左右振荡。这说明类似GAN的振荡现象在深度学习训练时是普遍存在的,通过权重平均可以得到质量更好的模型。
文章小结 #
本文主要从动力学角度探讨了GAN的优化问题。跟本系列的其他文章一样,将优化过程视为常微分方程组的求解,对于GAN的优化,这个常微分方程组稍微复杂一些。
分析的过程采用了Dirac GAN的思路,利用单点分布的极简情形对GAN的收敛过程形成快速认识,得到的结论是大多数GAN都无法真正收敛到均衡点,而只是在均衡点附近振荡。而为了缓解这个问题,最有力的方法是权重滑动平均,它对GAN和普通模型训练都有一定帮助。
(本文作图代码参考:https://github.com/bojone/gan/blob/master/gan_numeric.py)
转载到请包括本文地址:https://spaces.ac.cn/archives/6583
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (May. 03, 2019). 《从动力学角度看优化算法(四):GAN的第三个阶段 》[Blog post]. Retrieved from https://spaces.ac.cn/archives/6583
@online{kexuefm-6583,
title={从动力学角度看优化算法(四):GAN的第三个阶段},
author={苏剑林},
year={2019},
month={May},
url={\url{https://spaces.ac.cn/archives/6583}},
}

May 6th, 2019
过程看的有点懵,结论看得似懂非懂。请问博主,你说的的滑动平均应该是加在判别器还是生成器上?在pggan里EMA是在G网络更新时用到的。然后文中提到的L2正则项约束是对判别器加的。一个是判别器一个生成器,感觉这两trick似乎作用在不同的方面的,却都实现了约束振荡的效果?
L2正则和梯度惩罚,都是在判别器加的,它们都会改变原来的优化轨迹。
但是EMA根本就不影响原来优化轨迹,而一般情况下,GAN训练好之后只保留生成器,判别器是没用的,那自然只加在生成器中呀。当然,都加也无所谓,反正不改变原来的优化轨迹~
May 9th, 2019
你好,请问一下,使用你的代码得出的结果,使用权重滑动平均在测试集上重构性能变差了,这是正常的吗?按理说权重滑动平均应该提高泛化能力的啊。
你用什么指标测试重构性能?我目测没有什么明显下降呀。
苏神不好意思,可能之前没有刷新页面,我一直以为您没有回复我。
我就用的简单的l1和l2 loss作为重构指标,OGAN使用ema_decay之后测试集(训练集还是不错的)重构指标存在一定的效能下降,感觉有点奇怪,因为按理说是泛化性能会提高。我是直接load weights进行测试的,不知道这样处理有没有问题。
此外在实验中发现实验结果对pearson相关系数前面的权重有些敏感(不同数据集,合适的权重不太一样),还有卷积核size大小敏感(比如cifar10数据集,用4×4出现模式坍塌,5×5则效果较好)
补充一下第一个问题,重构效能确实不是明显下降,也就1%-3%吧,我是说奇怪他没有提高,不知道是否正常。当然了GAN本来就是生成模型,这个方面可能不是重点?
其实我一直有疑问,重构指标能直接用l1、l2 loss吗?我知道不少文章都是这样做的,但如果用l1、l2 loss,那干脆优化l1、l2 loss就行了,理论上vae就是最好的了?
不同的图像尺寸,pearson相关系数可能会比较敏感,但是同一图像尺寸估计不会特别敏感。至于卷积核,你举的例子太特殊了,作为一个生成任务,cifar10是非常难的,很多时候还需要定制网络效果才好些~
嗯,你说的很有道理,我也认同。主要目前也没找到更好的方法,用隐层的loss的话,效果也没有那么好,只是先这么用了。我也尝试过用你说的互信息,可能是没处理好,效果也一般。
对不同数据集应该是需要探索定制网络,不过那就是另一个研究内容了。
May 30th, 2019
这些图收敛画的很形象,想请问下是怎么画出来的,有相应代码吗
本文最后一行已经给出了代码地址。
请问公式(8)线性展开是怎么推导的,算了半天都没算出来 :(
sigmoid函数在0的解就是1/2
July 8th, 2019
7和8式少写了一个右括号
谢谢,已经修正。
July 10th, 2019
我现在有一个疑惑我想知道gan原文中说gan不再有马尔可夫链了。这个具体表现在哪里呀,很多解释都说gan是一步生成不再迭代了。而是采用反向传播不再是马尔可夫链的方法了。
我反而想问你两个问题:
1、你心目中的马尔可夫链是怎样的?
2、你知道哪些模型有马尔可夫链?
因为在一般人思想里,没有马尔科夫链才是正常的吧...
那我再思考一下,补补课,谢谢老师。
September 3rd, 2019
假设φ是判别器的参数,θ是判别器的参数??????写的啥??
笔误而已,不需要如此惊讶。已经修正了,谢谢指出~
September 29th, 2019
烦请苏老师评论一下这篇paper,谢谢
Rethinking Generative Mode Coverage: A Pointwise Guaranteed Approach
https://arxiv.org/abs/1902.04697
October 28th, 2020
博主你好,请问一下动力学视角研究GAN的收敛性或者优化方面,现在还有啥可做的?或者说还有啥paper的坑可填(笑哭)刚入计算数学大坑觉得这方面的内容能扯上关系,但是不知道如何下手,发现梯度惩罚、谱归一化这些都被做过了,所以还能挑哪一块下手呢?
坑很大很多,不少问题都没有解决,而且看上去解决了的也许会有更好的方案,比如L约束除了谱归一化和梯度惩罚还有别的方法吗?等等。
今天才看到一篇新文章《LEAD: Least-Action Dynamics for Min-Max Optimization》(https://arxiv.org/abs/2010.13846)。
不过都得需要有一定的基本和研究基础才能入坑吧,我也不好说还能做哪块,毕竟我也不是做这个方向的。
January 5th, 2022
苏神,请教一下,第8式子和第9式子的结果是怎么计算出来的?谢谢。
假设$\boldsymbol{\varphi}\approx \boldsymbol{0}, \boldsymbol{\theta}\approx \boldsymbol{0}$都是小量,那么$(8)$就只是泰勒展开,而$(9)$是$(8)$的变量代换。
May 16th, 2025
苏神你好,代码不应该展示的是theta与varphi的关系吗?为什么全是theta的关系呢?还有就是为啥要用四阶的呢,我代码有点懵,微分方程出来的就是一个梯度场吗不就是?我用二阶来求解为啥出不来你的图像呢
$\boldsymbol{\theta}$是生成器的参数,我主要关心生成器是否收敛。
苏神你好,感谢你的回答,我是在看的 Which Training Methods for GANs do actually Converge? 这篇文章中,它是生成器参数与判别器参数两个做的图像,这两个构成了一个系统,我寻思这是观察这两个是否收敛到0,难道是我理解错了吗,麻烦苏神解答一下再,谢谢
观察生成器,是因为在Dirac GAN的设置下,我们知道生成器应该收敛到哪里,但对于判别器,我们不知道它收敛到哪里。