






18
Jan
多任务学习漫谈(一):以损失之名
By 苏剑林 | 2022-01-18 | 146981位读者 | 引用能提升模型性能的方法有很多,多任务学习(Multi-Task Learning)也是其中一种。简单来说,多任务学习是希望将多个相关的任务共同训练,希望不同任务之间能够相互补充和促进,从而获得单任务上更好的效果(准确率、鲁棒性等)。然而,多任务学习并不是所有任务堆起来就能生效那么简单,如何平衡每个任务的训练,使得各个任务都尽量获得有益的提升,依然是值得研究的课题。
最近,笔者机缘巧合之下,也进行了一些多任务学习的尝试,借机也学习了相关内容,在此挑部分结果与大家交流和讨论。
加权求和
从损失函数的层面看,多任务学习就是有多个损失函数$\mathcal{L}_1,\mathcal{L}_2,\cdots,\mathcal{L}_n$,一般情况下它们有大量的共享参数、少量的独立参数,而我们的目标是让每个损失函数都尽可能地小。为此,我们引入权重$\alpha_1,\alpha_2,\cdots,\alpha_n\geq 0$,通过加权求和的方式将它转化为如下损失函数的单任务学习
\begin{equation}\mathcal{L} = \sum_{i=1}^n \alpha_i \mathcal{L}_i\label{eq:w-loss}\end{equation}
在这个视角下,多任务学习的主要难点就是如何确定各个$\alpha_i$了。
8
Feb
多任务学习漫谈(二):行梯度之事
By 苏剑林 | 2022-02-08 | 50568位读者 | 引用在《多任务学习漫谈(一):以损失之名》中,我们从损失函数的角度初步探讨了多任务学习问题,最终发现如果想要结果同时具有缩放不变性和平移不变性,那么用梯度的模长倒数作为任务的权重是一个比较简单的选择。我们继而分析了,该设计等价于将每个任务的梯度单独进行归一化后再相加,这意味着多任务的“战场”从损失函数转移到了梯度之上:看似在设计损失函数,实则在设计更好的梯度,所谓“以损失之名,行梯度之事”。
那么,更好的梯度有什么标准呢?如何设计出更好的梯度呢?本文我们就从梯度的视角来理解多任务学习,试图直接从设计梯度的思路出发构建多任务学习算法。
整体思路
我们知道,对于单任务学习,常用的优化方法就是梯度下降,那么它是怎么推导的呢?同样的思路能不能直接用于多任务学习呢?这便是这一节要回答的问题。
14
Feb
多任务学习漫谈(三):分主次之序
By 苏剑林 | 2022-02-14 | 34634位读者 | 引用多任务学习是一个很宽泛的命题,不同场景下多任务学习的目标不尽相同。在《多任务学习漫谈(一):以损失之名》和《多任务学习漫谈(二):行梯度之事》中,我们将多任务学习的目标理解为“做好每一个任务”,具体表现是“尽量平等地处理每一个任务”,我们可以称之为“平行型多任务学习”。然而,并不是所有多任务学习的目标都是如此,在很多场景下,我们主要还是想学好某一个主任务,其余任务都只是辅助,希望通过增加其他任务的学习来提升主任务的效果罢了,此类场景我们可以称为“主次型多任务学习”。
在这个背景下,如果还是沿用平行型多任务学习的“做好每一个任务”的学习方案,那么就可能会明显降低主任务的效果了。所以本文继续沿着“行梯度之事”的想法,探索主次型多任务学习的训练方案。
目标形式
在这篇文章中,我们假设读者已经阅读并且基本理解《多任务学习漫谈(二):行梯度之事》里边的思想和方法,那么在梯度视角下,让某个损失函数保持下降的必要条件是更新量与其梯度夹角至少大于90度,这是贯穿全文的设计思想。
16
Apr
搜狐文本匹配:基于条件LayerNorm的多任务baseline
By 苏剑林 | 2021-04-16 | 85999位读者 | 引用前段时间看到了“2021搜狐校园文本匹配算法大赛”,觉得赛题颇有意思,便尝试了一下,不过由于比赛本身只是面向在校学生,所以笔者是不能作为正式参赛人员参赛的,因此把自己的做法开源出来,作为比赛baseline供大家参考。
赛题介绍
顾名思义,比赛的任务是文本匹配,即判断两个文本是否相似,本来是比较常规的任务,但有意思的是它分了多个子任务。具体来说,它分A、B两大类,A类匹配标准宽松一些,B类匹配标准严格一些,然后每个大类下又分为“短短匹配”、“短长匹配”、“长长匹配”3个小类,因此,虽然任务类型相同,但严格来看它是六个不同的子任务。
27
Sep
必须要GPT3吗?不,BERT的MLM模型也能小样本学习
By 苏剑林 | 2020-09-27 | 148948位读者 | 引用大家都知道现在GPT3风头正盛,然而,到处都是GPT3、GPT3地推,读者是否记得GPT3论文的名字呢?事实上,GPT3的论文叫做《Language Models are Few-Shot Learners》,标题里边已经没有G、P、T几个单词了,只不过它跟开始的GPT是一脉相承的,因此还是以GPT称呼它。顾名思义,GPT3主打的是Few-Shot Learning,也就是小样本学习。此外,GPT3的另一个特点就是大,最大的版本多达1750亿参数,是BERT Base的一千多倍。
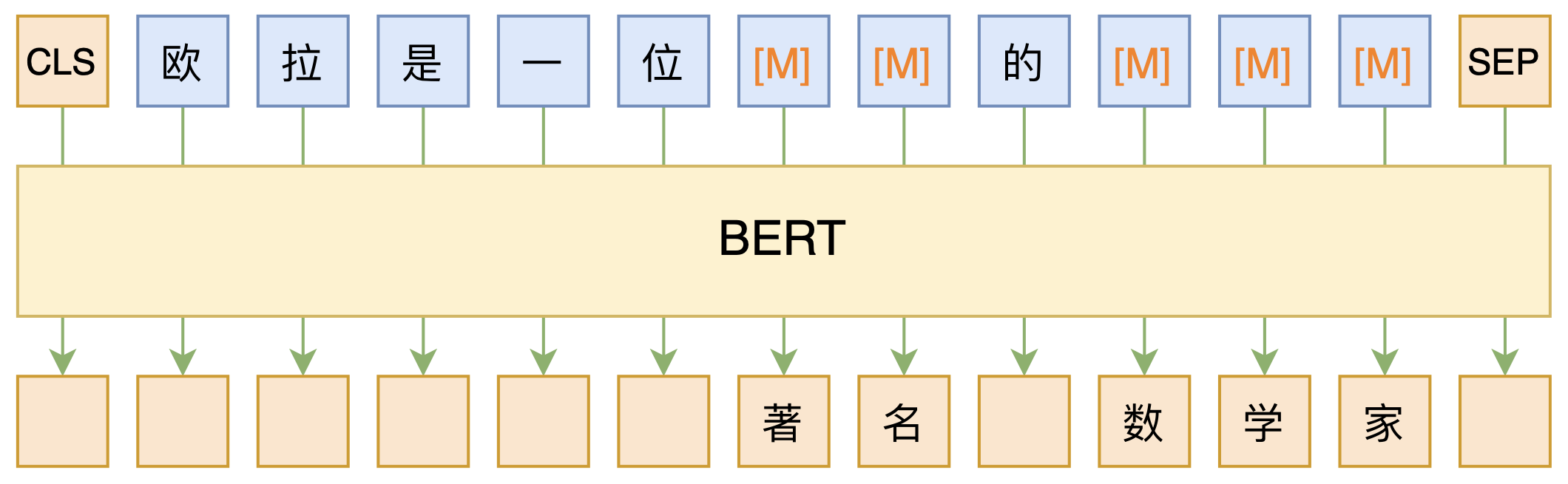
BERT的MLM模型简单示意图
正因如此,前些天Arxiv上的一篇论文《It's Not Just Size That Matters: Small Language Models Are Also Few-Shot Learners》便引起了笔者的注意,意译过来就是“谁说一定要大的?小模型也可以做小样本学习”。显然,这标题对标的就是GPT3,于是笔者饶有兴趣地点进去看看是谁这么有勇气挑战GPT3,又是怎样的小模型能挑战GPT3?经过阅读,原来作者提出通过适当的构造,用BERT的MLM模型也可以做小样本学习,看完之后颇有一种“原来还可以这样做”的恍然大悟感~在此与大家分享一下。
21
Mar
RoFormerV2:自然语言理解的极限探索
By 苏剑林 | 2022-03-21 | 56879位读者 | 引用大概在1年前,我们提出了旋转位置编码(RoPE),并发布了对应的预训练模型RoFormer。随着时间的推移,RoFormer非常幸运地得到了越来越多的关注和认可,比如EleutherAI新发布的60亿和200亿参数的GPT模型中就用上了RoPE位置编码,Google新提出的FLASH模型论文中则明确指出了RoPE对Transformer效果有明显的提升作用。
与此同时,我们也一直在尝试继续加强RoFormer模型,试图让RoFormer的性能“更上一层楼”。经过近半年的努力,我们自认为取得了还不错的成果,因此将其作为“RoFormerV2”正式发布:
20
Apr
你的语言模型有没有“无法预测的词”?
By 苏剑林 | 2022-04-20 | 20102位读者 | 引用众所周知,分类模型通常都是先得到编码向量,然后接一个Dense层预测每个类别的概率,而预测时则是输出概率最大的类别。但大家是否想过这样一种可能:训练好的分类模型可能存在“无法预测的类别”,即不管输入是什么,都不可能预测出某个类别$k$,类别$k$永远不可能成为概率最大的那个。
当然,这种情况一般只出现在类别数远远超过编码向量维度的场景,常规的分类问题很少这么极端的。然而,我们知道语言模型本质上也是一个分类模型,它的类别数也就是词表的总大小,往往是远超过向量维度的,那么我们的语言模型是否有“无法预测的词”?(只考虑Greedy解码)
是否存在
ACL2022的论文《Low-Rank Softmax Can Have Unargmaxable Classes in Theory but Rarely in Practice》首先探究了这个问题,正如其标题所言,答案是“理论上存在但实际出现概率很小”。
7
Feb
你的CRF层的学习率可能不够大
By 苏剑林 | 2020-02-07 | 99815位读者 | 引用CRF是做序列标注的经典方法,它理论优雅,实际也很有效,如果还不了解CRF的读者欢迎阅读旧作《简明条件随机场CRF介绍(附带纯Keras实现)》。在BERT模型出来之后,也有不少工作探索了BERT+CRF用于序列标注任务的做法。然而,很多实验结果显示(比如论文《BERT Meets Chinese Word Segmentation》)不管是中文分词还是实体识别任务,相比于简单的BERT+Softmax,BERT+CRF似乎并没有带来什么提升,这跟传统的BiLSTM+CRF或CNN+CRF的模型表现并不一样。

基于CRF的4标签分词模型示意图
这两天给bert4keras增加了用CRF做中文分词的例子(task_sequence_labeling_cws_crf.py),在调试过程中发现了CRF层可能存在学习不充分的问题,进一步做了几个对比实验,结果显示这可能是CRF在BERT中没什么提升的主要原因,遂在此记录一下分析过程,与大家分享。

最近评论