






25
Feb
【搜出来的文本】⋅(四)通过增、删、改来用词造句
By 苏剑林 | 2021-02-25 | 48703位读者 | 引用“用词造句”是小学阶段帮助我们理解和运用词语的一个经典任务,从自然语言处理的角度来看,它是一个句子扩写或者句子补全任务,它其实要求我们具有不定向地进行文本生成的能力。然而,当前主流的语言模型都是单方向生成的(多数是正向的,即从左往右,少数是反向的,即从右往左),但用词造句任务中所给的若干个词未必一定出现在句首或者句末,这导致无法直接用语言模型来完成造句任务。
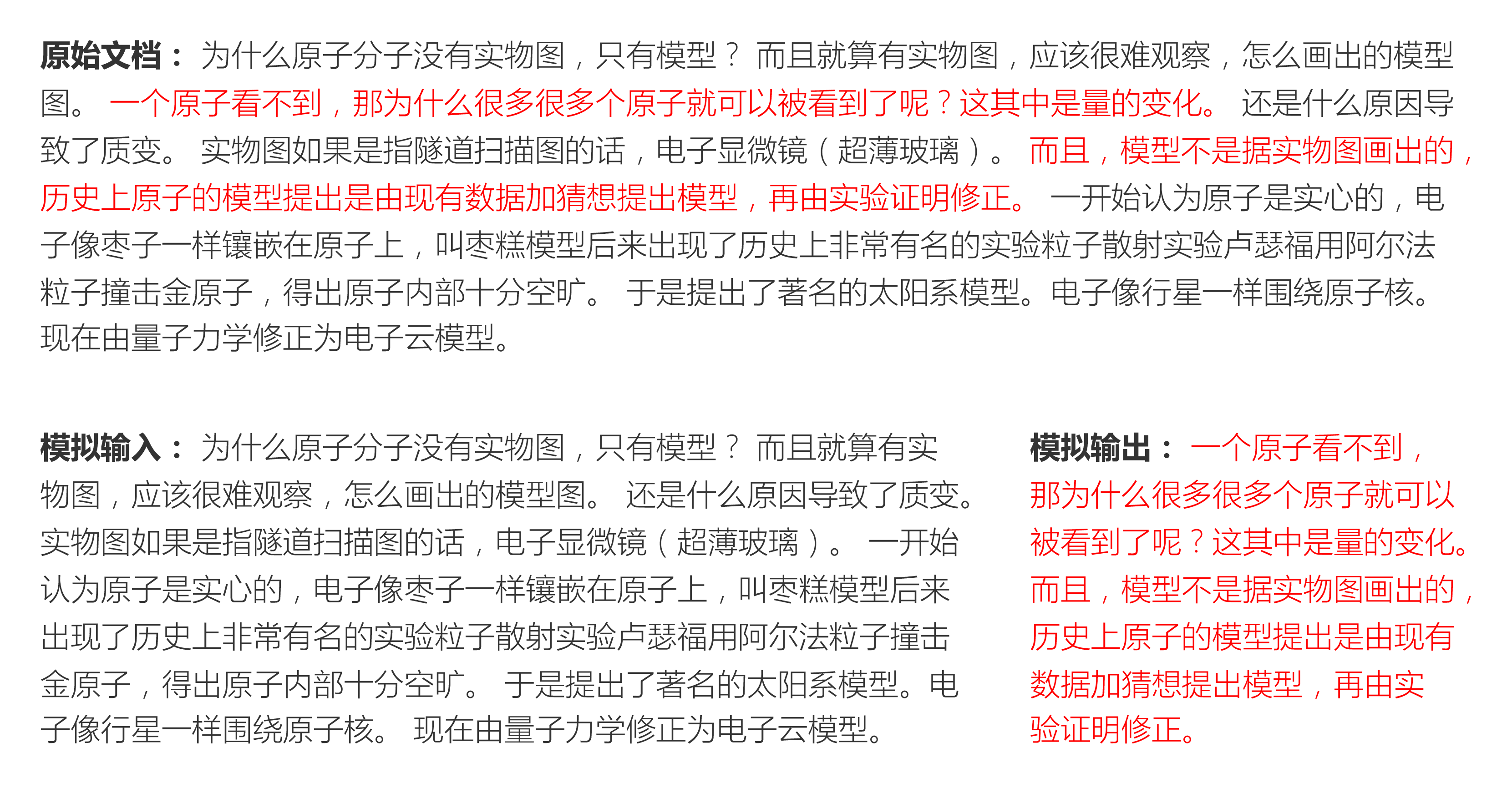
本文我们将介绍论文《CGMH: Constrained Sentence Generation by Metropolis-Hastings Sampling》,它使用MCMC采样使得单向语言模型也可以做到不定向生成,通过增、删、改操作模拟了人的写作润色过程,从而能无监督地完成用词造句等多种文本生成任务。
问题设置
无监督地进行文本采样,那么直接可以由语言模型来完成,而我们同样要做的,是往这个采样过程中加入一些信号$\boldsymbol{c}$,使得它能生成我们期望的一些文本。在本系列第一篇文章《【搜出来的文本】⋅(一)从文本生成到搜索采样》的“明确目标”一节中,我们就介绍了本系列的指导思想:把我们要寻找的目标量化地写下来,然后最大化它或者从中采样。
3
Mar
T5 PEGASUS:开源一个中文生成式预训练模型
By 苏剑林 | 2021-03-03 | 191377位读者 | 引用去年在文章《那个屠榜的T5模型,现在可以在中文上玩玩了》中我们介绍了Google的多国语言版T5模型(mT5),并给出了用mT5进行中文文本生成任务的例子。诚然,mT5做中文生成任务也是一个可用的方案,但缺乏完全由中文语料训练出来模型总感觉有点别扭,于是决心要搞一个出来。
经过反复斟酌测试,我们决定以mT5为基础架构和初始权重,先结合中文的特点完善Tokenizer,然后模仿PEGASUS来构建预训练任务,从而训练一版新的T5模型,这就是本文所开源的T5 PEGASUS。
T5 PEGASUS的训练数据示例
23
Mar
Transformer升级之路:2、博采众长的旋转式位置编码
By 苏剑林 | 2021-03-23 | 298978位读者 | 引用上一篇文章中,我们对原始的Sinusoidal位置编码做了较为详细的推导和理解,总的感觉是Sinusoidal位置编码是一种“想要成为相对位置编码的绝对位置编码”。一般来说,绝对位置编码具有实现简单、计算速度快等优点,而相对位置编码则直接地体现了相对位置信号,跟我们的直观理解吻合,实际性能往往也更好。由此可见,如果可以通过绝对位置编码的方式实现相对位置编码,那么就是“集各家之所长”、“鱼与熊掌兼得”了。Sinusoidal位置编码隐约做到了这一点,但并不够好。
本文将会介绍我们自研的Rotary Transformer(RoFormer)模型,它的主要改动是应用了笔者构思的“旋转式位置编码(Rotary Position Embedding,RoPE)”,这是一种配合Attention机制能达到“绝对位置编码的方式实现相对位置编码”的设计。而也正因为这种设计,它还是目前唯一一种可用于线性Attention的相对位置编码。
3
Apr
P-tuning:自动构建模版,释放语言模型潜能
By 苏剑林 | 2021-04-03 | 149356位读者 | 引用在之前的文章《必须要GPT3吗?不,BERT的MLM模型也能小样本学习》中,我们介绍了一种名为Pattern-Exploiting Training(PET)的方法,它通过人工构建的模版与BERT的MLM模型结合,能够起到非常好的零样本、小样本乃至半监督学习效果,而且该思路比较优雅漂亮,因为它将预训练任务和下游任务统一起来了。然而,人工构建这样的模版有时候也是比较困难的,而且不同的模版效果差别也很大,如果能够通过少量样本来自动构建模版,也是非常有价值的。
![P-tuning直接使用[unused]来构建模版,不关心模版的自然语言性](/usr/uploads/2021/04/2868831073.png)
P-tuning直接使用[unused]来构建模版,不关心模版的自然语言性
最近Arxiv上的论文《GPT Understands, Too》提出了名为P-tuning的方法,成功地实现了模版的自动构建。不仅如此,借助P-tuning,GPT在SuperGLUE上的成绩首次超过了同等级别的BERT模型,这颠覆了一直以来“GPT不擅长NLU”的结论,也是该论文命名的缘由。
1
May
GlobalPointer:用统一的方式处理嵌套和非嵌套NER
By 苏剑林 | 2021-05-01 | 312395位读者 | 引用(注:本文的相关内容已整理成论文《Global Pointer: Novel Efficient Span-based Approach for Named Entity Recognition》,如需引用可以直接引用英文论文,谢谢。)
本文将介绍一个称为GlobalPointer的设计,它利用全局归一化的思路来进行命名实体识别(NER),可以无差别地识别嵌套实体和非嵌套实体,在非嵌套(Flat NER)的情形下它能取得媲美CRF的效果,而在嵌套(Nested NER)情形它也有不错的效果。还有,在理论上,GlobalPointer的设计思想就比CRF更合理;而在实践上,它训练的时候不需要像CRF那样递归计算分母,预测的时候也不需要动态规划,是完全并行的,理想情况下时间复杂度是$\mathcal{O}(1)$!
简单来说,就是更漂亮、更快速、更强大!真有那么好的设计吗?不妨继续看看。
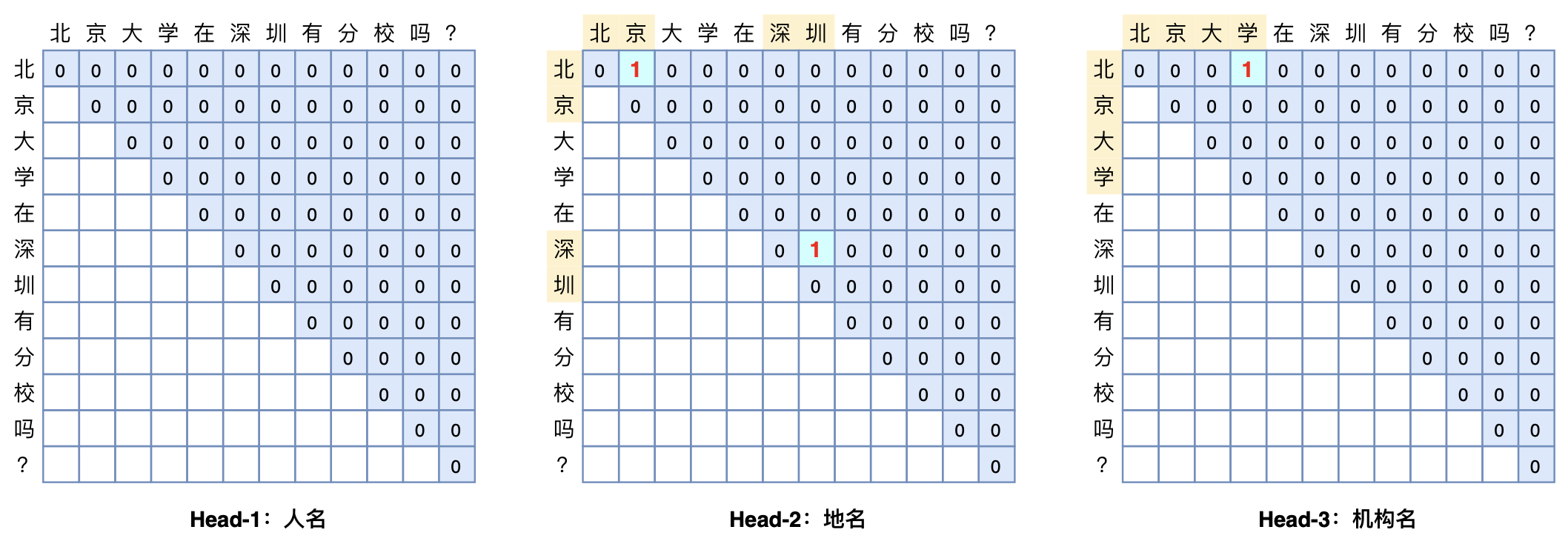
GlobalPointer多头识别嵌套实体示意图
11
Jun
SimBERTv2来了!融合检索和生成的RoFormer-Sim模型
By 苏剑林 | 2021-06-11 | 111310位读者 | 引用去年我们放出了SimBERT模型,它算是我们开源的比较成功的模型之一,获得了不少读者的认可。简单来说,SimBERT是一个融生成和检索于一体的模型,可以用来作为句向量的一个比较高的baseline,也可以用来实现相似问句的自动生成,可以作为辅助数据扩增工具使用,这一功能是开创性的。
近段时间,我们以RoFormer为基础模型,对SimBERT相关技术进一步整合和优化,最终发布了升级版的RoFormer-Sim模型。
简介
RoFormer-Sim是SimBERT的升级版,我们也可以通俗地称之为“SimBERTv2”,而SimBERT则默认是指旧版。从外部看,除了基础架构换成了RoFormer外,RoFormer-Sim跟SimBERT没什么明显差别,事实上它们主要的区别在于训练的细节上,我们可以用两个公式进行对比:
\begin{array}{c}
\text{SimBERT} = \text{BERT} + \text{UniLM} + \text{对比学习} \\[5pt]
\text{RoFormer-Sim} = \text{RoFormer} + \text{UniLM} + \text{对比学习} + \text{BART} + \text{蒸馏}\\
\end{array}
18
Oct
初始化方法中非方阵的维度平均策略思考
By 苏剑林 | 2021-10-18 | 31411位读者 | 引用在《从几何视角来理解模型参数的初始化策略》、《浅谈Transformer的初始化、参数化与标准化》等文章,我们讨论过模型的初始化方法,大致的思路是:如果一个$n\times n$的方阵用均值为0、方差为$1/n$的独立同分布初始化,那么近似于一个正交矩阵,使得数据二阶矩(或方差)在传播过程中大致保持不变。
那如果是$m\times n$的非方阵呢?常见的思路(Xavier初始化)是综合考虑前向传播和反向传播,所以使用均值为0、方差为$2/(m+n)$的独立同分布初始化。但这个平均更多是“拍脑袋”的,本文就来探究一下有没有更好的平均方案。
基础回顾
Xavier初始化是考虑如下的全连接层(设输入节点数为$m$,输出节点数为$n$)
\begin{equation} y_j = b_j + \sum_i x_i w_{i,j}\end{equation}
11
Dec
输入梯度惩罚与参数梯度惩罚的一个不等式
By 苏剑林 | 2021-12-11 | 23620位读者 | 引用在本博客中,已经多次讨论过梯度惩罚相关内容了。从形式上来看,梯度惩罚项分为两种,一种是关于输入的梯度惩罚$\Vert\nabla_{\boldsymbol{x}} f(\boldsymbol{x};\boldsymbol{\theta})\Vert^2$,在《对抗训练浅谈:意义、方法和思考(附Keras实现)》、《泛化性乱弹:从随机噪声、梯度惩罚到虚拟对抗训练》等文章中我们讨论过,另一种则是关于参数的梯度惩罚$\Vert\nabla_{\boldsymbol{\theta}} f(\boldsymbol{x};\boldsymbol{\theta})\Vert^2$,在《从动力学角度看优化算法(五):为什么学习率不宜过小?》、《我们真的需要把训练集的损失降低到零吗?》等文章我们讨论过。
在相关文章中,两种梯度惩罚都声称有着提高模型泛化性能的能力,那么两者有没有什么联系呢?笔者从Google最近的一篇论文《The Geometric Occam's Razor Implicit in Deep Learning》学习到了两者的一个不等式,算是部分地回答了这个问题,并且感觉以后可能用得上,在此做个笔记。
最终结果
假设有一个$l$层的MLP模型,记为
\begin{equation}\boldsymbol{h}^{(t+1)} = g^{(t)}(\boldsymbol{W}^{(t)}\boldsymbol{h}^{(t)}+\boldsymbol{b}^{(t)})\end{equation}
其中$g^{(t)}$是当前层的激活函数,$t\in\{1,2,\cdots,l\}$,并记$\boldsymbol{h}^{(1)}$为$\boldsymbol{x}$,即模型的原始输入,为了方便后面的推导,我们记$\boldsymbol{z}^{(t+1)}=\boldsymbol{W}^{(t)}\boldsymbol{h}^{(t)}+\boldsymbol{b}^{(t)}$;参数全体为$\boldsymbol{\theta}=\{\boldsymbol{W}^{(1)},\boldsymbol{b}^{(1)},\boldsymbol{W}^{(2)},\boldsymbol{b}^{(2)},\cdots,\boldsymbol{W}^{(l)},\boldsymbol{b}^{(l)}\}$。设$f$是$\boldsymbol{h}^{(l+1)}$的任意标量函数,那么成立不等式
\begin{equation}\Vert\nabla_{\boldsymbol{x}} f\Vert^2\left(\frac{1 + \Vert \boldsymbol{h}^{(1)}\Vert^2}{\Vert\boldsymbol{W}^{(1)}\Vert^2 \Vert\nabla_{\boldsymbol{x}}\boldsymbol{h}^{(1)}\Vert^2}+\cdots+\frac{1 + \Vert \boldsymbol{h}^{(l)}\Vert^2}{\Vert\boldsymbol{W}^{(l)}\Vert^2 \Vert\nabla_{\boldsymbol{x}}\boldsymbol{h}^{(l)}\Vert^2}\right)\leq \Vert\nabla_{\boldsymbol{\theta}} f\Vert^2\label{eq:f}\end{equation}

最近评论