






29
Jun
UniVAE:基于Transformer的单模型、多尺度的VAE模型
By 苏剑林 | 2021-06-29 | 74182位读者 | 引用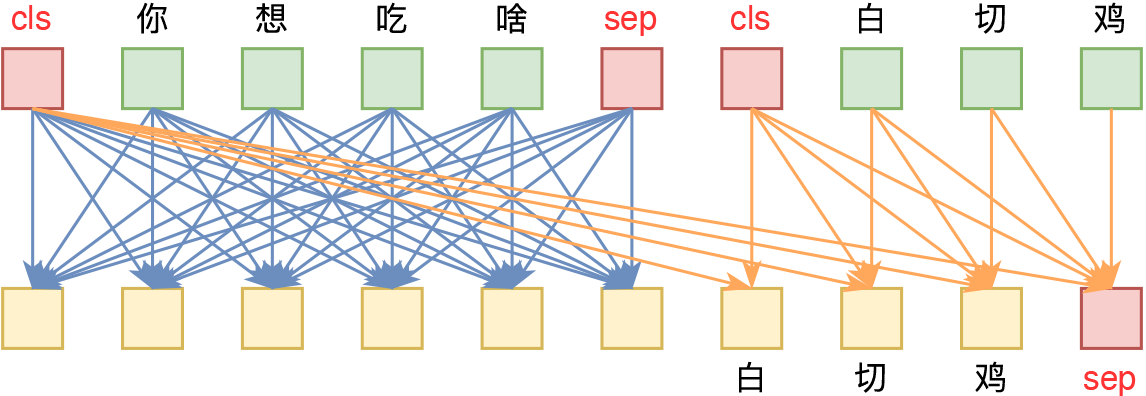
26
Jul
FlatNCE:小批次对比学习效果差的原因竟是浮点误差?
By 苏剑林 | 2021-07-26 | 46649位读者 | 引用自SimCLR在视觉无监督学习大放异彩以来,对比学习逐渐在CV乃至NLP中流行了起来,相关研究和工作越来越多。标准的对比学习的一个广为人知的缺点是需要比较大的batch_size(SimCLR在batch_size=4096时效果最佳),小batch_size的时候效果会明显降低,为此,后续工作的改进方向之一就是降低对大batch_size的依赖。那么,一个很自然的问题是:标准的对比学习在小batch_size时效果差的原因究竟是什么呢?
近日,一篇名为《Simpler, Faster, Stronger: Breaking The log-K Curse On Contrastive Learners With FlatNCE》对此问题作出了回答:因为浮点误差。看起来真的很让人难以置信,但论文的分析确实颇有道理,并且所提出的改进FlatNCE确实也工作得更好,让人不得不信服。
细微之处
接下来,笔者将按照自己的理解和记号来介绍原论文的主要内容。对比学习(Contrastive Learning)就不帮大家详细复习了,大体上来说,对于某个样本$x$,我们需要构建$K$个配对样本$y_1,y_2,\cdots,y_K$,其中$y_t$是正样本而其余都是负样本,然后分别给每个样本对$(x, y_i)$打分,分别记为$s_1,s_2,\cdots,s_K$,对比学习希望拉大正负样本对的得分差,通常直接用交叉熵作为损失:
\begin{equation}-\log \frac{e^{s_t}}{\sum\limits_i e^{s_i}} = \log \left(\sum_i e^{s_i}\right) - s_t = \log \left(1 + \sum_{i\neq t} e^{s_i - s_t}\right)\end{equation}
6
Aug
Transformer升级之路:5、作为无限维的线性Attention
By 苏剑林 | 2021-08-06 | 23752位读者 | 引用在《Performer:用随机投影将Attention的复杂度线性化》中我们了解到Google提出的Performer模型,它提出了一种随机投影方案,可以将标准Attention转化为线性Attention,并保持一定的近似。理论上来说,只要投影的维度足够大,那么可以足够近似标准Attention。换句话说,标准Attention可以视作一个无限维的线性Attention。
本文将介绍笔者构思的另外两种将标准Attention转换为无限维线性Attention的思路,不同于Performer的随机投影,笔者构思的这两种方案都是确定性的,并且能比较方便地感知近似程度。
简要介绍
关于标准Attention和线性Attention,这里就不多做介绍了,还不了解的读者可以参考笔者之前的文章《线性Attention的探索:Attention必须有个Softmax吗?》和《Transformer升级之路:3、从Performer到线性Attention》。简单来说,标准Attention的计算方式为
\begin{equation}a_{i,j}=\frac{e^{\boldsymbol{q}_i\cdot \boldsymbol{k}_j}}{\sum\limits_j e^{\boldsymbol{q}_i\cdot \boldsymbol{k}_j}}\end{equation}
17
Sep
让人惊叹的Johnson-Lindenstrauss引理:理论篇
By 苏剑林 | 2021-09-17 | 85830位读者 | 引用今天我们来学习Johnson-Lindenstrauss引理,由于名字比较长,下面都简称“JL引理”。
个人认为,JL引理是每一个计算机科学的同学都必须了解的神奇结论之一,它是一个关于降维的著名的结果,它也是高维空间中众多反直觉的“维度灾难”现象的经典例子之一。可以说,JL引理是机器学习中各种降维、Hash等技术的理论基础,此外,在现代机器学习中,JL引理也为我们理解、调试模型维度等相关参数提供了重要的理论支撑。
对数的维度
JL引理,可以非常通俗地表达为:
通俗版JL引理: 塞下$N$个向量,只需要$\mathcal{O}(\log N)$维空间。
10
Sep
曾被嫌弃的预训练任务NSP,做出了优秀的Zero Shot效果
By 苏剑林 | 2021-09-10 | 55804位读者 | 引用在五花八门的预训练任务设计中,NSP通常认为是比较糟糕的一种,因为它难度较低,加入到预训练中并没有使下游任务微调时有明显受益,甚至RoBERTa的论文显示它会带来负面效果。所以,后续的预训练工作一般有两种选择:一是像RoBERTa一样干脆去掉NSP任务,二是像ALBERT一样想办法提高NSP的难度。也就是说,一直以来NSP都是比较“让人嫌弃”的。
不过,反转来了,NSP可能要“翻身”了。最近的一篇论文《NSP-BERT: A Prompt-based Zero-Shot Learner Through an Original Pre-training Task--Next Sentence Prediction》(下面简称NSP-BERT)显示NSP居然也可以做到非常不错的Zero Shot效果!这又是一个基于模版(Prompt)的Few/Zero Shot的经典案例,只不过这一次的主角是NSP。
背景回顾
曾经我们认为预训练纯粹就是预训练,它只是为下游任务的训练提供更好的初始化,像BERT的预训练任务有MLM(Masked Language Model和NSP(Next Sentence Prediction),在相当长的一段时间内,大家都不关心这两个预训练任务本身,而只是专注于如何通过微调来使得下游任务获得更好的性能。哪怕是T5将模型参数训练到了110亿,走的依然是“预训练+微调”这一路线。
22
Nov
ChildTuning:试试把Dropout加到梯度上去?
By 苏剑林 | 2021-11-22 | 66590位读者 | 引用Dropout是经典的防止过拟合的思路了,想必很多读者已经了解过它。有意思的是,最近Dropout有点“老树发新芽”的感觉,出现了一些有趣的新玩法,比如最近引起过热议的SimCSE和R-Drop,尤其是在文章《又是Dropout两次!这次它做到了有监督任务的SOTA》中,我们发现简单的R-Drop甚至能媲美对抗训练,不得不说让人意外。
一般来说,Dropout是被加在每一层的输出中,或者是加在模型参数上,这是Dropout的两个经典用法。不过,最近笔者从论文《Raise a Child in Large Language Model: Towards Effective and Generalizable Fine-tuning》中学到了一种新颖的用法:加到梯度上面。
梯度加上Dropout?相信大部分读者都是没听说过的。那么效果究竟如何呢?让我们来详细看看。
17
Dec
Seq2Seq+前缀树:检索任务新范式(以KgCLUE为例)
By 苏剑林 | 2021-12-17 | 66249位读者 | 引用两年前,在《万能的seq2seq:基于seq2seq的阅读理解问答》和《“非自回归”也不差:基于MLM的阅读理解问答》中,我们在尝试过分别利用“Seq2Seq+前缀树”和“MLM+前缀树”的方式做抽取式阅读理解任务,并获得了不错的结果。而在去年的ICLR2021上,Facebook的论文《Autoregressive Entity Retrieval》同样利用“Seq2Seq+前缀树”的组合,在实体链接和文档检索上做到了效果与效率的“双赢”。
事实上,“Seq2Seq+前缀树”的组合理论上可以用到任意检索型任务中,堪称是检索任务的“新范式”。本文将再次回顾“Seq2Seq+前缀树”的思路,并用它来实现最近推出的KgCLUE知识图谱问答榜单的一个baseline。
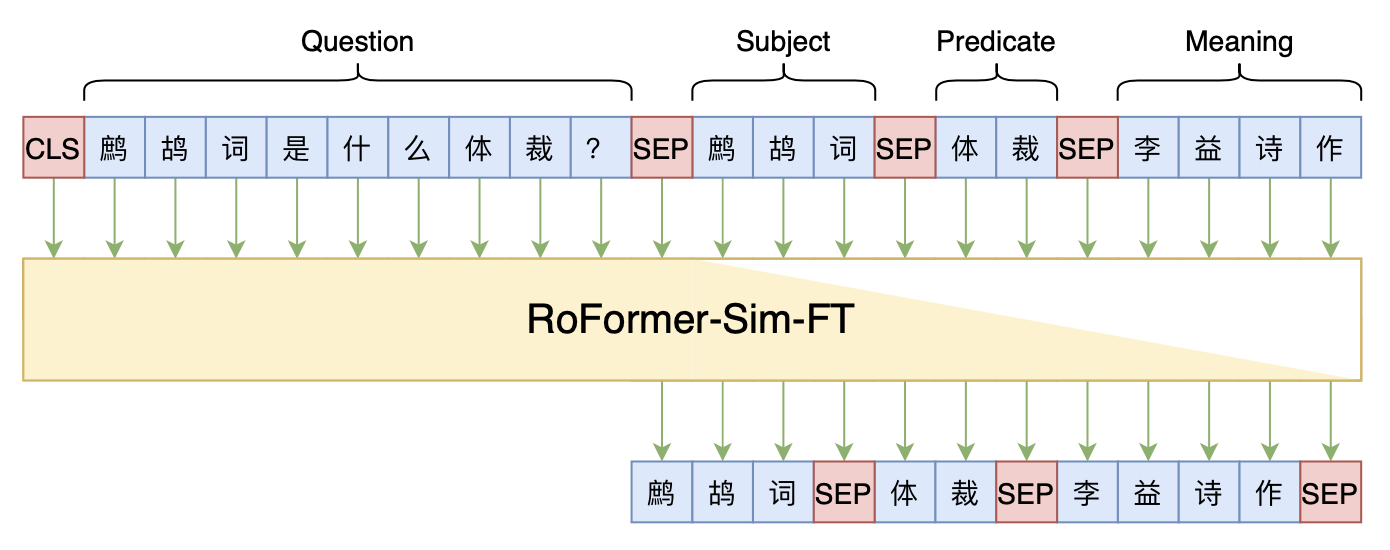
本文baseline模型示意图
21
Dec
从熵不变性看Attention的Scale操作
By 苏剑林 | 2021-12-21 | 117646位读者 | 引用当前Transformer架构用的最多的注意力机制,全称为“Scaled Dot-Product Attention”,其中“Scaled”是因为在$Q,K$转置相乘之后还要除以一个$\sqrt{d}$再做Softmax(下面均不失一般性地假设$Q,K,V\in\mathbb{R}^{n\times d}$):
\begin{equation}Attention(Q,K,V) = softmax\left(\frac{QK^{\top}}{\sqrt{d}}\right)V\label{eq:std}\end{equation}
在《浅谈Transformer的初始化、参数化与标准化》中,我们已经初步解释了除以$\sqrt{d}$的缘由。而在这篇文章中,笔者将从“熵不变性”的角度来理解这个缩放操作,并且得到一个新的缩放因子。在MLM的实验显示,新的缩放因子具有更好的长度外推性能。
熵不变性
我们将一般的Scaled Dot-Product Attention改写成
\begin{equation}\boldsymbol{o}_i = \sum_{j=1}^n a_{i,j}\boldsymbol{v}_j,\quad a_{i,j}=\frac{e^{\lambda \boldsymbol{q}_i\cdot \boldsymbol{k}_j}}{\sum\limits_{j=1}^n e^{\lambda \boldsymbol{q}_i\cdot \boldsymbol{k}_j}}\end{equation}
其中$\lambda$是缩放因子,它跟$\boldsymbol{q}_i,\boldsymbol{k}_j$无关,但原则上可以跟长度$n$、维度$d$等参数有关,目前主流的就是$\lambda=1/\sqrt{d}$。

最近评论