






10
Sep
曾被嫌弃的预训练任务NSP,做出了优秀的Zero Shot效果
By 苏剑林 | 2021-09-10 | 53869位读者 | 引用在五花八门的预训练任务设计中,NSP通常认为是比较糟糕的一种,因为它难度较低,加入到预训练中并没有使下游任务微调时有明显受益,甚至RoBERTa的论文显示它会带来负面效果。所以,后续的预训练工作一般有两种选择:一是像RoBERTa一样干脆去掉NSP任务,二是像ALBERT一样想办法提高NSP的难度。也就是说,一直以来NSP都是比较“让人嫌弃”的。
不过,反转来了,NSP可能要“翻身”了。最近的一篇论文《NSP-BERT: A Prompt-based Zero-Shot Learner Through an Original Pre-training Task--Next Sentence Prediction》(下面简称NSP-BERT)显示NSP居然也可以做到非常不错的Zero Shot效果!这又是一个基于模版(Prompt)的Few/Zero Shot的经典案例,只不过这一次的主角是NSP。
背景回顾
曾经我们认为预训练纯粹就是预训练,它只是为下游任务的训练提供更好的初始化,像BERT的预训练任务有MLM(Masked Language Model和NSP(Next Sentence Prediction),在相当长的一段时间内,大家都不关心这两个预训练任务本身,而只是专注于如何通过微调来使得下游任务获得更好的性能。哪怕是T5将模型参数训练到了110亿,走的依然是“预训练+微调”这一路线。
22
Oct
CAN:借助先验分布提升分类性能的简单后处理技巧
By 苏剑林 | 2021-10-22 | 143851位读者 | 引用顾名思义,本文将会介绍一种用于分类问题的后处理技巧——CAN(Classification with Alternating Normalization),出自论文《When in Doubt: Improving Classification Performance with Alternating Normalization》。经过笔者的实测,CAN确实多数情况下能提升多分类问题的效果,而且几乎没有增加预测成本,因为它仅仅是对预测结果的简单重新归一化操作。
有趣的是,其实CAN的思想是非常朴素的,朴素到每个人在生活中都应该用过同样的思想。然而,CAN的论文却没有很好地说清楚这个思想,只是纯粹形式化地介绍和实验这个方法。本文的分享中,将会尽量将算法思想介绍清楚。
思想例子
假设有一个二分类问题,模型对于输入$a$给出的预测结果是$p^{(a)} = [0.05, 0.95]$,那么我们就可以给出预测类别为$1$;接下来,对于输入$b$,模型给出的预测结果是$p^{(b)}=[0.5,0.5]$,这时候处于最不确定的状态,我们也不知道输出哪个类别好。
11
Dec
输入梯度惩罚与参数梯度惩罚的一个不等式
By 苏剑林 | 2021-12-11 | 23103位读者 | 引用在本博客中,已经多次讨论过梯度惩罚相关内容了。从形式上来看,梯度惩罚项分为两种,一种是关于输入的梯度惩罚$\Vert\nabla_{\boldsymbol{x}} f(\boldsymbol{x};\boldsymbol{\theta})\Vert^2$,在《对抗训练浅谈:意义、方法和思考(附Keras实现)》、《泛化性乱弹:从随机噪声、梯度惩罚到虚拟对抗训练》等文章中我们讨论过,另一种则是关于参数的梯度惩罚$\Vert\nabla_{\boldsymbol{\theta}} f(\boldsymbol{x};\boldsymbol{\theta})\Vert^2$,在《从动力学角度看优化算法(五):为什么学习率不宜过小?》、《我们真的需要把训练集的损失降低到零吗?》等文章我们讨论过。
在相关文章中,两种梯度惩罚都声称有着提高模型泛化性能的能力,那么两者有没有什么联系呢?笔者从Google最近的一篇论文《The Geometric Occam's Razor Implicit in Deep Learning》学习到了两者的一个不等式,算是部分地回答了这个问题,并且感觉以后可能用得上,在此做个笔记。
最终结果
假设有一个$l$层的MLP模型,记为
\begin{equation}\boldsymbol{h}^{(t+1)} = g^{(t)}(\boldsymbol{W}^{(t)}\boldsymbol{h}^{(t)}+\boldsymbol{b}^{(t)})\end{equation}
其中$g^{(t)}$是当前层的激活函数,$t\in\{1,2,\cdots,l\}$,并记$\boldsymbol{h}^{(1)}$为$\boldsymbol{x}$,即模型的原始输入,为了方便后面的推导,我们记$\boldsymbol{z}^{(t+1)}=\boldsymbol{W}^{(t)}\boldsymbol{h}^{(t)}+\boldsymbol{b}^{(t)}$;参数全体为$\boldsymbol{\theta}=\{\boldsymbol{W}^{(1)},\boldsymbol{b}^{(1)},\boldsymbol{W}^{(2)},\boldsymbol{b}^{(2)},\cdots,\boldsymbol{W}^{(l)},\boldsymbol{b}^{(l)}\}$。设$f$是$\boldsymbol{h}^{(l+1)}$的任意标量函数,那么成立不等式
\begin{equation}\Vert\nabla_{\boldsymbol{x}} f\Vert^2\left(\frac{1 + \Vert \boldsymbol{h}^{(1)}\Vert^2}{\Vert\boldsymbol{W}^{(1)}\Vert^2 \Vert\nabla_{\boldsymbol{x}}\boldsymbol{h}^{(1)}\Vert^2}+\cdots+\frac{1 + \Vert \boldsymbol{h}^{(l)}\Vert^2}{\Vert\boldsymbol{W}^{(l)}\Vert^2 \Vert\nabla_{\boldsymbol{x}}\boldsymbol{h}^{(l)}\Vert^2}\right)\leq \Vert\nabla_{\boldsymbol{\theta}} f\Vert^2\label{eq:f}\end{equation}
17
Dec
Seq2Seq+前缀树:检索任务新范式(以KgCLUE为例)
By 苏剑林 | 2021-12-17 | 64536位读者 | 引用两年前,在《万能的seq2seq:基于seq2seq的阅读理解问答》和《“非自回归”也不差:基于MLM的阅读理解问答》中,我们在尝试过分别利用“Seq2Seq+前缀树”和“MLM+前缀树”的方式做抽取式阅读理解任务,并获得了不错的结果。而在去年的ICLR2021上,Facebook的论文《Autoregressive Entity Retrieval》同样利用“Seq2Seq+前缀树”的组合,在实体链接和文档检索上做到了效果与效率的“双赢”。
事实上,“Seq2Seq+前缀树”的组合理论上可以用到任意检索型任务中,堪称是检索任务的“新范式”。本文将再次回顾“Seq2Seq+前缀树”的思路,并用它来实现最近推出的KgCLUE知识图谱问答榜单的一个baseline。
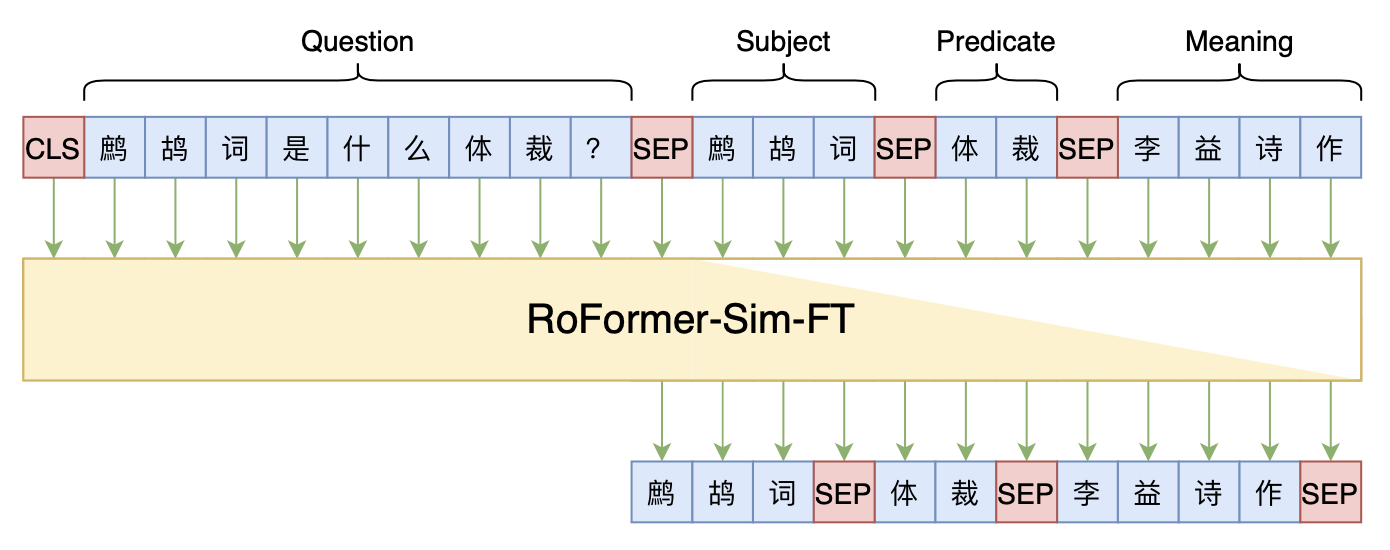
本文baseline模型示意图
6
Jan
CoSENT(一):比Sentence-BERT更有效的句向量方案
By 苏剑林 | 2022-01-06 | 215646位读者 | 引用学习句向量的方案大致上可以分为无监督和有监督两大类,其中有监督句向量比较主流的方案是Facebook提出的“InferSent”,而后的“Sentence-BERT”进一步在BERT上肯定了它的有效性。然而,不管是InferSent还是Sentence-BERT,它们在理论上依然相当令人迷惑,因为它们虽然有效,但存在训练和预测不一致的问题,而如果直接优化预测目标cos值,效果往往特别差。
最近,笔者再次思考了这个问题,经过近一周的分析和实验,大致上确定了InferSent有效以及直接优化cos值无效的原因,并提出了一个优化cos值的新方案CoSENT(Cosine Sentence)。实验显示,CoSENT在收敛速度和最终效果上普遍都比InferSent和Sentence-BERT要好。
朴素思路
本文的场景是利用文本匹配的标注数据来构建句向量模型,其中所利用到的标注数据是常见的句子对样本,即每条样本是“(句子1, 句子2, 标签)”的格式,它们又大致上可以分类“是非类型”、“NLI类型”、“打分类型”三种,参考《用开源的人工标注数据来增强RoFormer-Sim》中的“分门别类”一节。
失效的Cos
简单起见,我们可以先只考虑“是非类型”的数据,即“(句子1, 句子2, 是否相似)”的样本。假设两个句子经过编码模型后分别得到向量$u,v$,由于检索阶段计算的是余弦相似度$\cos(u,v)=\frac{\langle u,v\rangle}{\Vert u\Vert \Vert v\Vert}$,所以比较自然的想法是设计基于$\cos(u,v)$的损失函数,比如
\begin{align}t\cdot (1 - \cos(u, v)) + (1 - t) \cdot (1 + \cos(u,v))\label{eq:cos-1}\\
t\cdot (1 - \cos(u, v))^2 + (1 - t) \cdot \cos^2(u,v)\label{eq:cos-2}
\end{align}
24
Dec
概率分布的熵归一化(Entropy Normalization)
By 苏剑林 | 2021-12-24 | 46819位读者 | 引用在上一篇文章《从熵不变性看Attention的Scale操作》中,我们从熵不变性的角度推导了一个新的Attention Scale,并且实验显示具有熵不变性的新Scale确实能使得Attention的外推性能更好。这时候笔者就有一个很自然的疑问:
有没有类似L2 Normalization之类的操作,可以直接对概率分布进行变换,使得保持原始分布主要特性的同时,让它的熵为指定值?
笔者带着疑问搜索了一番,发现没有类似的研究,于是自己尝试推导了一下,算是得到了一个基本满意的结果,暂称为“熵归一化(Entropy Normalization)”,记录在此,供有需要的读者参考。
幂次变换
首先,假设$n$元分布$(p_1,p_2,\cdots,p_n)$,它的熵定义为
\begin{equation}\mathcal{H} = -\sum_i p_i \log p_i = \mathbb{E}[-\log p_i]\end{equation}
8
Feb
多任务学习漫谈(二):行梯度之事
By 苏剑林 | 2022-02-08 | 50602位读者 | 引用在《多任务学习漫谈(一):以损失之名》中,我们从损失函数的角度初步探讨了多任务学习问题,最终发现如果想要结果同时具有缩放不变性和平移不变性,那么用梯度的模长倒数作为任务的权重是一个比较简单的选择。我们继而分析了,该设计等价于将每个任务的梯度单独进行归一化后再相加,这意味着多任务的“战场”从损失函数转移到了梯度之上:看似在设计损失函数,实则在设计更好的梯度,所谓“以损失之名,行梯度之事”。
那么,更好的梯度有什么标准呢?如何设计出更好的梯度呢?本文我们就从梯度的视角来理解多任务学习,试图直接从设计梯度的思路出发构建多任务学习算法。
整体思路
我们知道,对于单任务学习,常用的优化方法就是梯度下降,那么它是怎么推导的呢?同样的思路能不能直接用于多任务学习呢?这便是这一节要回答的问题。
25
Jan
Efficient GlobalPointer:少点参数,多点效果
By 苏剑林 | 2022-01-25 | 116358位读者 | 引用在《GlobalPointer:用统一的方式处理嵌套和非嵌套NER》中,我们提出了名为“GlobalPointer”的token-pair识别模块,当它用于NER时,能统一处理嵌套和非嵌套任务,并在非嵌套场景有着比CRF更快的速度和不逊色于CRF的效果。换言之,就目前的实验结果来看,至少在NER场景,我们可以放心地将CRF替换为GlobalPointer,而不用担心效果和速度上的损失。
在这篇文章中,我们提出GlobalPointer的一个改进版——Efficient GlobalPointer,它主要针对原GlobalPointer参数利用率不高的问题进行改进,明显降低了GlobalPointer的参数量。更有趣的是,多个任务的实验结果显示,参数量更少的Efficient GlobalPointer反而还取得更好的效果。
大量的参数
这里简单回顾一下GlobalPointer,详细介绍则请读者阅读《GlobalPointer:用统一的方式处理嵌套和非嵌套NER》。简单来说,GlobalPointer是基于内积的token-pair识别模块,它可以用于NER场景,因为对于NER来说我们只需要把每一类实体的“(首, 尾)”这样的token-pair识别出来就行了。

最近评论