






7
Jul
从SamplePairing到mixup:神奇的正则项
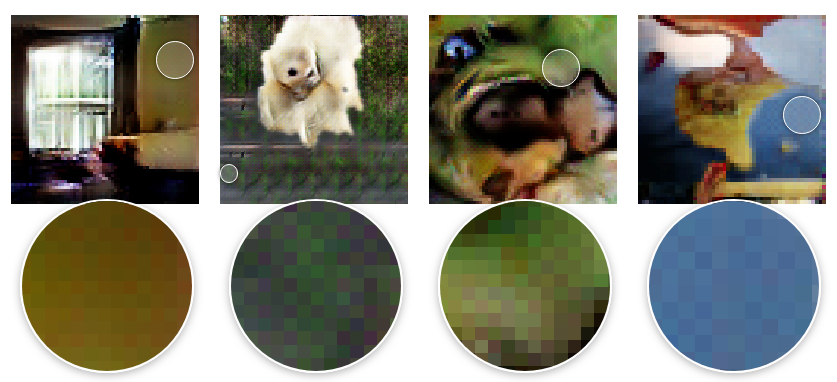
By 苏剑林 | 2018-07-07 | 78377位读者 | 引用SamplePairing和mixup是两种一脉相承的图像数据扩增手段,它们看起来很不合理,而操作则非常简单,但结果却非常漂亮:在多个图像分类任务中都表明它们能提高最终分类模型的精度。
某些读者会困惑于一个问题:为什么如此不合理的数据扩增手段,能得到如此好的效果?而本文则要表明,它们看起来是一种数据扩增方法,事实上它们是对模型的一种正则化方案。正如周星驰的电影《国产凌凌漆》的一句经典台词:
表面上看这是一个吹风机,其实它是一个刮胡刀。
数据扩增
让我们从数据扩增说起。数据扩增是指我们在对原始数据做一些简单的变换后,它们对应的类别往往不会变化,所以我们可以在原来数据的基础上,“造”出更多的数据来。比如一幅小狗的照片,将它水平翻转、轻微的旋转、裁剪、平移等操作后,我们认为它的类别没有变化,它还是原来的那只狗。这样一来,从一个样本我们可以衍生出好几个样本,从而增加了训练样本量。

狗

旋转的狗
19
Apr
从DCGAN到SELF-MOD:GAN的模型架构发展一览
By 苏剑林 | 2019-04-19 | 79586位读者 | 引用事实上,O-GAN的发现,已经达到了我对GAN的理想追求,使得我可以很惬意地跳出GAN的大坑了。所以现在我会试图探索更多更广的研究方向,比如NLP中还没做过的任务,又比如图神经网络,又或者其他有趣的东西。
不过,在此之前,我想把之前的GAN的学习结果都记录下来。
这篇文章中,我们来梳理一下GAN的架构发展情况,当然主要的是生成器的发展,判别器一直以来的变动都不大。还有,本文介绍的是GAN在图像方面的模型架构发展,跟NLP的SeqGAN没什么关系。
此外,关于GAN的基本科普,本文就不再赘述了。
棋盘效应图示,体现为放大之后出现如国际象棋棋盘一样的交错效应。图片来自文章《Deconvolution and Checkerboard Artifacts》
18
Sep
从语言模型到Seq2Seq:Transformer如戏,全靠Mask
By 苏剑林 | 2019-09-18 | 323878位读者 | 引用相信近一年来(尤其是近半年来),大家都能很频繁地看到各种Transformer相关工作(比如Bert、GPT、XLNet等等)的报导,连同各种基础评测任务的评测指标不断被刷新。同时,也有很多相关的博客、专栏等对这些模型做科普和解读。
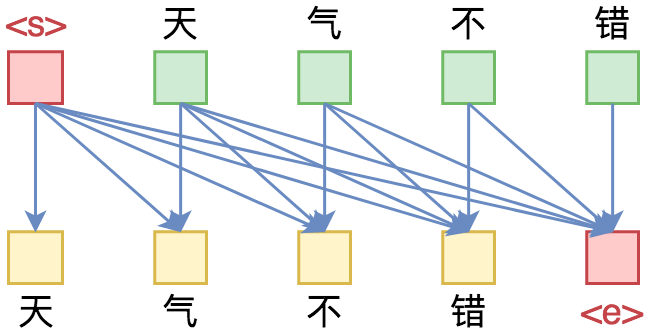
单向语言模型图示。每预测一个token,只依赖于前面的token。
俗话说,“外行看热闹,内行看门道”,我们不仅要在“是什么”这个层面去理解这些工作,我们还需要思考“为什么”。这个“为什么”不仅仅是“为什么要这样做”,还包括“为什么可以这样做”。比如,在谈到XLNet的乱序语言模型时,我们或许已经从诸多介绍中明白了乱序语言模型的好处,那不妨更进一步思考一下:
为什么Transformer可以实现乱序语言模型?是怎么实现的?RNN可以实现吗?
本文从对Attention矩阵进行Mask的角度,来分析为什么众多Transformer模型可以玩得如此“出彩”的基本原因,正如标题所述“Transformer如戏,全靠Mask”,这是各种花式Transformer模型的重要“门道”之一。
读完本文,你或许可以了解到:
1、Attention矩阵的Mask方式与各种预训练方案的关系;
2、直接利用预训练的Bert模型来做Seq2Seq任务。
16
Jan
从几何视角来理解模型参数的初始化策略
By 苏剑林 | 2020-01-16 | 93094位读者 | 引用对于复杂模型来说,参数的初始化显得尤为重要。糟糕的初始化,很多时候已经不单是模型效果变差的问题了,还更有可能是模型根本训练不动或者不收敛。在深度学习中常见的自适应初始化策略是Xavier初始化,它是从正态分布$\mathcal{N}\left(0,\frac{2}{fan_{in} + fan_{out}}\right)$中随机采样而构成的初始权重,其中$fan_{in}$是输入的维度而$fan_{out}$是输出的维度。其他初始化策略基本上也类似,只不过假设有所不同,导致最终形式略有差别。
标准的初始化策略的推导是基于概率统计的,大概的思路是假设输入数据的均值为0、方差为1,然后期望输出数据也保持均值为0、方差为1,然后推导出初始变换应该满足的均值和方差条件。这个过程理论上没啥问题,但在笔者看来依然不够直观,而且推导过程的假设有点多。本文则希望能从几何视角来理解模型的初始化方法,给出一个更直观的推导过程。
信手拈来的正交
前者时间笔者写了《n维空间下两个随机向量的夹角分布》,其中的一个推论是
推论1: 高维空间中的任意两个随机向量几乎都是垂直的。
22
Apr
Transformer升级之路:3、从Performer到线性Attention
By 苏剑林 | 2021-04-22 | 54531位读者 | 引用看过笔者之前的文章《线性Attention的探索:Attention必须有个Softmax吗?》和《Performer:用随机投影将Attention的复杂度线性化》的读者,可能会觉得本文的标题有点不自然,因为是先有线性Attention然后才有Performer的,它们的关系为“Performer是线性Attention的一种实现,在保证线性复杂度的同时保持了对标准Attention的近似”,所以正常来说是“从线性Attention到Performer”才对。
然而,本文并不是打算梳理线性Attention的发展史,而是打算反过来思考Performer给线性Attention所带来的启示,所以是“从Performer到线性Attention”。
激活函数
线性Attention的常见形式是
\begin{equation}Attention(\boldsymbol{Q},\boldsymbol{K},\boldsymbol{V})_i = \frac{\sum\limits_{j=1}^n \text{sim}(\boldsymbol{q}_i, \boldsymbol{k}_j)\boldsymbol{v}_j}{\sum\limits_{j=1}^n \text{sim}(\boldsymbol{q}_i, \boldsymbol{k}_j)} = \frac{\sum\limits_{j=1}^n \phi(\boldsymbol{q}_i)^{\top} \varphi(\boldsymbol{k}_j)\boldsymbol{v}_j}{\sum\limits_{j=1}^n \phi(\boldsymbol{q}_i)^{\top} \varphi(\boldsymbol{k}_j)}\end{equation}
5
Jun
从一个单位向量变换到另一个单位向量的正交矩阵
By 苏剑林 | 2021-06-05 | 42287位读者 | 引用这篇文章我们来讨论一个比较实用的线性代数问题:
给定两个$d$维单位(列)向量$\boldsymbol{a},\boldsymbol{b}$,求一个正交矩阵$\boldsymbol{T}$,使得$\boldsymbol{b}=\boldsymbol{T}\boldsymbol{a}$。
由于两个向量模长相同,所以很显然这样的正交矩阵必然存在,那么,我们怎么把它找出来呢?
二维
不难想象,这本质上就是$\boldsymbol{a},\boldsymbol{b}$构成的二维子平面下的向量变换(比如旋转或者镜面反射)问题,所以我们先考虑$d=2$的情形。

正交分解示意图
1
Sep
从三角不等式到Margin Softmax
By 苏剑林 | 2021-09-01 | 33306位读者 | 引用在《基于GRU和AM-Softmax的句子相似度模型》中我们介绍了AM-Softmax,它是一种带margin的softmax,通常用于用分类做检索的场景。当时通过图示的方式简单说了一下引入margin是因为“分类与排序的不等价性”,但没有比较定量地解释这种不等价性的来源。
在这篇文章里,我们来重提这个话题,从距离的三角不等式的角度来推导和理解margin的必要性。
三角不等式
平时,我们说的距离一般指比较直观的“欧氏距离”,但在数学上距离,距离又叫“度量”,它有公理化的定义,是指定义在某个集合上的二元函数$d(x,y)$,满足:
21
Dec
从熵不变性看Attention的Scale操作
By 苏剑林 | 2021-12-21 | 112688位读者 | 引用当前Transformer架构用的最多的注意力机制,全称为“Scaled Dot-Product Attention”,其中“Scaled”是因为在$Q,K$转置相乘之后还要除以一个$\sqrt{d}$再做Softmax(下面均不失一般性地假设$Q,K,V\in\mathbb{R}^{n\times d}$):
\begin{equation}Attention(Q,K,V) = softmax\left(\frac{QK^{\top}}{\sqrt{d}}\right)V\label{eq:std}\end{equation}
在《浅谈Transformer的初始化、参数化与标准化》中,我们已经初步解释了除以$\sqrt{d}$的缘由。而在这篇文章中,笔者将从“熵不变性”的角度来理解这个缩放操作,并且得到一个新的缩放因子。在MLM的实验显示,新的缩放因子具有更好的长度外推性能。
熵不变性
我们将一般的Scaled Dot-Product Attention改写成
\begin{equation}\boldsymbol{o}_i = \sum_{j=1}^n a_{i,j}\boldsymbol{v}_j,\quad a_{i,j}=\frac{e^{\lambda \boldsymbol{q}_i\cdot \boldsymbol{k}_j}}{\sum\limits_{j=1}^n e^{\lambda \boldsymbol{q}_i\cdot \boldsymbol{k}_j}}\end{equation}
其中$\lambda$是缩放因子,它跟$\boldsymbol{q}_i,\boldsymbol{k}_j$无关,但原则上可以跟长度$n$、维度$d$等参数有关,目前主流的就是$\lambda=1/\sqrt{d}$。

最近评论