






14
Sep
生成扩散模型漫谈(十):统一扩散模型(理论篇)
By 苏剑林 | 2022-09-14 | 134166位读者 |老读者也许会发现,相比之前的更新频率,这篇文章可谓是“姗姗来迟”,因为这篇文章“想得太多”了。
通过前面九篇文章,我们已经对生成扩散模型做了一个相对全面的介绍。虽然理论内容很多,但我们可以发现,前面介绍的扩散模型处理的都是连续型对象,并且都是基于正态噪声来构建前向过程。而“想得太多”的本文,则希望能够构建一个能突破以上限制的扩散模型统一框架(Unified Diffusion Model,UDM):
1、不限对象类型(可以是连续型$\boldsymbol{x}$,也可以是离散型的$\boldsymbol{x}$);
2、不限前向过程(可以用加噪、模糊、遮掩、删减等各种变换构建前向过程);
3、不限时间类型(可以是离散型的$t$,也可以是连续型的$t$);
4、包含已有结果(可以推出前面的DDPM、DDIM、SDE、ODE等结果)。
这是不是太过“异想天开”了?有没有那么理想的框架?本文就来尝试一下。
前向过程 #
从前面的一系列介绍中,我们知道构建一个扩散模型包含“前向过程”、“反向过程”、“训练目标”三个部分,这一节我们来分析“前向过程”。
在最初的DDPM中,我们是通过$p(\boldsymbol{x}_t|\boldsymbol{x}_{t-1})$来描述前向过程的;后来,随着DDIM等工作的发表,我们逐渐意识到,扩散模型的训练目标和生成过程,都跟$p(\boldsymbol{x}_t|\boldsymbol{x}_{t-1})$没直接联系,反而跟$p(\boldsymbol{x}_t|\boldsymbol{x}_0)$的联系更为直接,而从$p(\boldsymbol{x}_t|\boldsymbol{x}_{t-1})$推导$p(\boldsymbol{x}_t|\boldsymbol{x}_0)$往往也比较困难。因此,一个更为实用的操作就是直接以$p(\boldsymbol{x}_t|\boldsymbol{x}_0)$为出发点,也就是将$p(\boldsymbol{x}_t|\boldsymbol{x}_0)$视为前向过程。
$p(\boldsymbol{x}_t|\boldsymbol{x}_0)$的最直接作用,就是用来构建扩散模型的训练数据,因此$p(\boldsymbol{x}_t|\boldsymbol{x}_0)$的最基本要求是便于采样。为此,我们可以通过重参数
\begin{equation}\boldsymbol{x}_t = \boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon})\label{eq:re-param}\end{equation}
其中$\boldsymbol{\mathcal{F}}$是关于$t,\boldsymbol{x}_0,\boldsymbol{\varepsilon}$的确定性函数,$\boldsymbol{\varepsilon}$是采样自某个标准分布$q(\boldsymbol{\varepsilon})$的随机变量,常见选择是标准正态分布,但其他分布通常也是可行的。可以想像,该形式包含了足够丰富的$\boldsymbol{x}_0$到$\boldsymbol{x}_t$的变换,它对$\boldsymbol{x}_0$、$\boldsymbol{x}_t$的数据类型也没有约束。一般情况下,唯一的限制是$t$越小,$\boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon})$所包含的$\boldsymbol{x}_0$的信息越完整,换言之用$\boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon})$重构$\boldsymbol{x}_0$越容易,反之$t$越大重构就越困难,直到某个上界$T$时,$\boldsymbol{\mathcal{F}}_T(\boldsymbol{x}_0,\boldsymbol{\varepsilon})$所包含的$\boldsymbol{x}_0$的信息几乎消失,重构几乎不能完成。
反向过程 #
扩散模型的反向过程是通过多步迭代来逐渐生成逼真的数据,其关键就是概率分布$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t)$。一般地,我们有
\begin{equation}p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t) = \int p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0) p(\boldsymbol{x}_0|\boldsymbol{x}_t) d\boldsymbol{x}_0\label{eq:p-factor}\end{equation}
如果$\boldsymbol{x}_0$是离散型数据,将积分改为求和即可。$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t)$的基本要求也是便于采样,所以我们要求$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$和$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$也要便于采样,这样一来,我们就可以通过下述流程完成$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t)$的采样:
\begin{equation}\hat{\boldsymbol{x}}_0\sim p(\boldsymbol{x}_0|\boldsymbol{x}_t)\quad \& \quad \boldsymbol{x}_{t-1}\sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0=\hat{\boldsymbol{x}}_0) \quad \Rightarrow \quad \boldsymbol{x}_{t-1}\sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t)\end{equation}
从这个分解来看,每一步$\boldsymbol{x}_t\to \boldsymbol{x}_{t-1}$的采样,实际上包含了两个子步骤:
1、预估:由$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$对$\boldsymbol{x}_0$做一个简单的“预估”;
2、修正:由$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$整合预估结果,将估值推前一小步。
所以,扩散模型的反向过程就是一个反复的“预估-修正”过程,通过不断地整合$\boldsymbol{x}_t\to \boldsymbol{x}_0$的预估结果,得到逐步推进的修正序列$\boldsymbol{x}_T\to\cdots\to\boldsymbol{x}_t\to \boldsymbol{x}_{t-1}\to\cdots\to \boldsymbol{x}_0$,将原本难以一步到位的生成分解为了多个步骤来完成。
训练目标 #
当然,目前的反向过程还只是“纸上谈兵”,因为对于$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$和$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$我们还一无所知。这一节我们先来讨论$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$。
很明显,$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$就是用$\boldsymbol{x}_t$来预测$\boldsymbol{x}_0$的概率模型,我们需要用一个“方便采样且容易计算”的分布去估计它。当$\boldsymbol{x}_0$是连续型数据时,我们的选择并不多,通常就是均值可训练的正态分布
\begin{equation}p(\boldsymbol{x}_0|\boldsymbol{x}_t) \approx q(\boldsymbol{x}_0|\boldsymbol{x}_t) = \mathcal{N}(\boldsymbol{x}_0;\boldsymbol{\mathcal{G}}_t(\boldsymbol{x}_t),\bar{\sigma}_t^2 \boldsymbol{I})\label{eq:normal}\end{equation}
为了降低训练难度,我们一般不将方差$\bar{\sigma}_t^2$视为可训练参数,而是用《生成扩散模型漫谈(七):最优扩散方差估计(上)》的方式去事后估计它。另一方面,当$\boldsymbol{x}_0$是离散型数据时,我们可以用自回归或者非自回归的语言模型(Seq2Seq)来建模,离散型的概率建模和采样相对来说都更加容易些。
有了近似分布$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$的具体形式后,训练目标就很简单了,比较自然的选择是交叉熵:
\begin{equation}\mathbb{E}_{\boldsymbol{x}_0\sim \tilde{p}(\boldsymbol{x}_0),\boldsymbol{x}_t\sim p(\boldsymbol{x}_t|\boldsymbol{x}_0)}[-\log q(\boldsymbol{x}_0|\boldsymbol{x}_t)] = \mathbb{E}_{\boldsymbol{x}_0\sim \tilde{p}(\boldsymbol{x}_0),\boldsymbol{\varepsilon}\sim q(\boldsymbol{\varepsilon})}[-\log q(\boldsymbol{x}_0|\boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon}))]\end{equation}
这就解决了$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$的估计和训练目标的设计问题。如果$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$是式$\eqref{eq:normal}$的标准正态分布,那么省去常数后的结果就是
\begin{equation}\mathbb{E}_{\boldsymbol{x}_0\sim \tilde{p}(\boldsymbol{x}_0),\boldsymbol{\varepsilon}\sim q(\boldsymbol{\varepsilon})}\left[\frac{1}{2\bar{\sigma}_t^2}\Vert\boldsymbol{x}_0 - \boldsymbol{\mathcal{G}}_t(\boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon}))\Vert^2\right]\end{equation}
条件概率 #
现在就剩下$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$了,它是给定$\boldsymbol{x}_t, \boldsymbol{x}_0$来预测$\boldsymbol{x}_{t-1}$的概率。这个概率分布也有一定的设计空间,但前提是满足边缘分布的恒等式
\begin{equation}\int p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)p(\boldsymbol{x}_t|\boldsymbol{x}_0) d\boldsymbol{x}_t= p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_0)\label{eq:margin}\end{equation}
很显然,满足这个等式的一个最简单选择是直接取
\begin{equation}p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0) = p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_0)\end{equation}
即让$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$跟$\boldsymbol{x}_t$无关。这样的扩散模型,可以由下面两个图描述(以$T=5$为例):
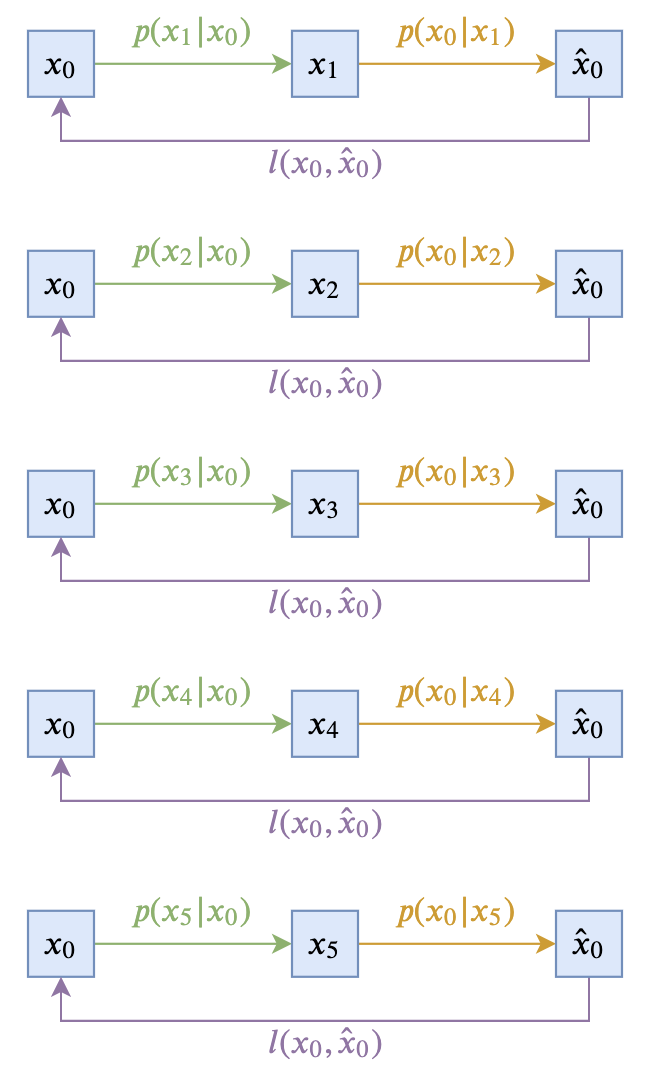
前向过程和训练目标示意图
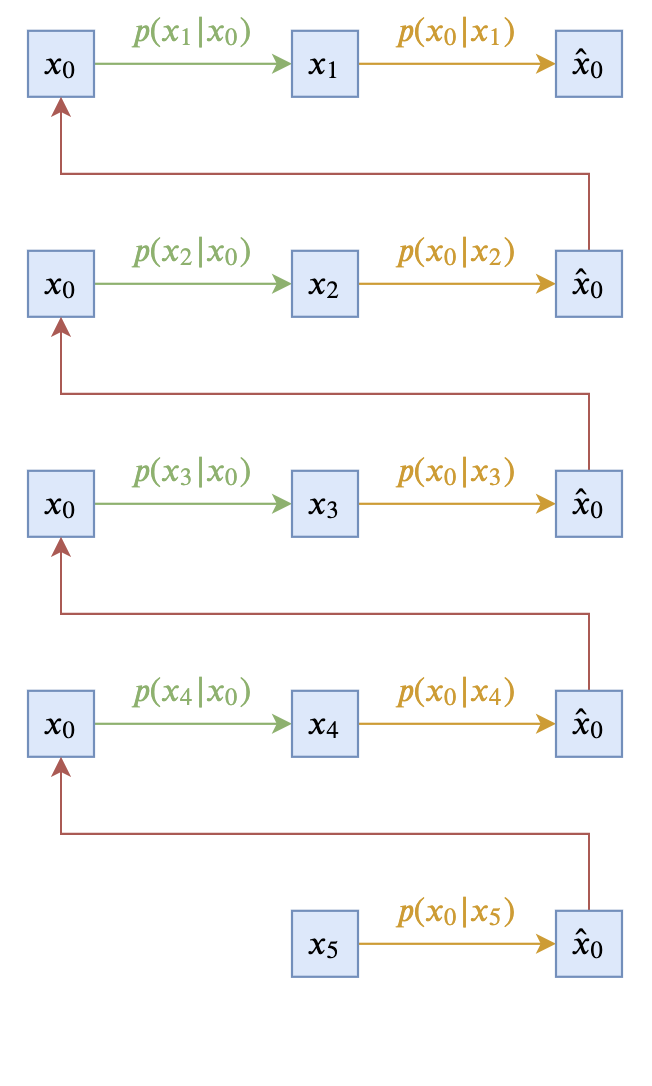
最简单选择下的反向过程
这个极简的选择在理论上没有问题,然而实际上的效果通常不会太好,因此此时$\boldsymbol{x}_{t-1}$完全依赖于$\boldsymbol{x}_0$,而$\boldsymbol{x}_0$本来代表的是原始真实样本,在反向过程中我们则只能通过近似分布$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$来近似采样,而$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$通常是不够准确的,因此误差会持续累积。另外,$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_0)$在采样过程中会带有噪声,这个噪声可能会严重破坏刚刚预估出来的$\hat{\boldsymbol{x}}_0$信息,从而使得生成效果变差。
不过很幸运,大多数情况下,我们都可以基于$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0) = p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_0)$这个简单的选择来衍生出一个新的结果。根据式$\eqref{eq:re-param}$,我们知道
\begin{equation}\begin{aligned}
\boldsymbol{x}_{t-1} \sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_0)\quad\Leftrightarrow&\,\quad\boldsymbol{x}_{t-1} = \boldsymbol{\mathcal{F}}_{t-1}(\boldsymbol{x}_0,\boldsymbol{\varepsilon}) \\
\boldsymbol{x}_t \sim p(\boldsymbol{x}_t|\boldsymbol{x}_0)\quad\Leftrightarrow&\,\quad\boldsymbol{x}_t = \boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon})
\end{aligned}\end{equation}
假定$\boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon})$关于$\boldsymbol{\varepsilon}$是可逆的,那么可以解出$\boldsymbol{\varepsilon} = \boldsymbol{\mathcal{F}}_t^{-1}(\boldsymbol{x}_0,\boldsymbol{x}_t)$,此时可以用解出来的这个$\boldsymbol{\varepsilon}$替换掉$\boldsymbol{\mathcal{F}}_{t-1}(\boldsymbol{x}_0,\boldsymbol{\varepsilon})$中的$\boldsymbol{\varepsilon}$,得到
\begin{equation}\boldsymbol{x}_{t-1} = \boldsymbol{\mathcal{F}}_{t-1}(\boldsymbol{x}_0,\boldsymbol{\mathcal{F}}_t^{-1}(\boldsymbol{x}_0,\boldsymbol{x}_t))\end{equation}
这就相当于
\begin{equation}p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0) = \delta\big(\boldsymbol{x}_{t-1} - \boldsymbol{\mathcal{F}}_{t-1}(\boldsymbol{x}_0,\boldsymbol{\mathcal{F}}_t^{-1}(\boldsymbol{x}_0,\boldsymbol{x}_t))\big)\end{equation}
是一个同时依赖于$\boldsymbol{x}_t, \boldsymbol{x}_0$的$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$设计,$\boldsymbol{x}_t$分摊了$\boldsymbol{x}_{t-1}$对$\boldsymbol{x}_0$的部分依赖,并且消除了噪声,使得每一步生成的“进展”可以稳定地累积下来,因此用这个设计的反向过程往往有更好的效果。
此外,如果是$q(\boldsymbol{\varepsilon})$是标准正态分布,那么还可以得到更一般的结果,因为由正态分布的叠加性,我们可以得到
\begin{equation}\boldsymbol{x}_{t-1} = \boldsymbol{\mathcal{F}}_{t-1}(\boldsymbol{x}_0,\boldsymbol{\varepsilon})\quad\Leftrightarrow\quad\boldsymbol{x}_{t-1} = \boldsymbol{\mathcal{F}}_{t-1}(\boldsymbol{x}_0,\sqrt{1 - \tilde{\sigma}_t^2}\boldsymbol{\varepsilon}_1 + \tilde{\sigma}_t \boldsymbol{\varepsilon}_2)\end{equation}
这样一来,由$\boldsymbol{x}_0,\boldsymbol{x}_t$解出来的$\boldsymbol{\varepsilon}$可以只用来替换$\boldsymbol{\varepsilon}_1$或$\boldsymbol{\varepsilon}_2$中的一个,最终得到的$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$的采样过程就是
\begin{equation}\quad\boldsymbol{x}_{t-1} = \boldsymbol{\mathcal{F}}_{t-1}(\boldsymbol{x}_0,\sqrt{1 - \tilde{\sigma}_t^2}\boldsymbol{\mathcal{F}}_t^{-1}(\boldsymbol{x}_0,\boldsymbol{x}_t) + \tilde{\sigma}_t \boldsymbol{\varepsilon})\end{equation}
思考分析 #
至此,统一扩散模型UDM的理论框架已经构建完毕,下一篇文章我们会通过一些具体例子介绍如何从UDM框架推出已有的扩散模型结果,以及进一步得到一些新的结果,这一节我们来对全文的推理做一个思考分析。
看完全文,相信不少读者是比较懵的,因为本文的结果是建立在笔者前面对扩散模型的所有理解基础上总结出来的一个统一框架,总体的技术不算很难,但是逻辑上并不容易捋清楚。首先,本文的目标是“设计一个统一的扩散模型理论框架”,这个框架能够完成本文开头罗列出来的目标。“设计”的关键是把握住“自由”和“约束”,有一些部分是可以灵活选择的,有一些部分则是带有约束的,不能乱来的。
如果读者已经对现有生成扩散模型比较熟悉,想必就能领悟到扩散模型的本质思想就是“从破坏中学习建设”,因此“破坏”的方式理论上是可以随意选择的,“建设”则是需要学习的。当然,“破坏”的方式实际上也不是毫无约束,一般来说必须是“渐进式破坏”,这样我们才能学会“渐进式建设”。这样一来,我们就构建了式$\eqref{eq:re-param}$的破坏过程(前向过程),$t$用来描述破坏的进度,$\mathcal{F}$可以用来表示任意破坏方式,对原始数据$\boldsymbol{x}_0$也没有特别限制,至于$\boldsymbol{\varepsilon}$则用来描述破坏过程中可能存在的随机因素。这样,我们就建立了一个最一般的破坏过程。
至于建设,我们首先给出了分解式$\eqref{eq:p-factor}$,这是概率论本身给出的一个恒等式,我们可以将它理解为一个约束,也可以理解为是一个引导。怎么知道要往式$\eqref{eq:p-factor}$想呢?事后来看,前向过程是一个$\boldsymbol{x}_0\to \boldsymbol{x}_t$的过程,所以反向过程就应该尽量与$\boldsymbol{x}_t\to \boldsymbol{x}_0$联系起来,因此能联想到式$\eqref{eq:p-factor}$。
分解式$\eqref{eq:p-factor}$包含两个部分,其中$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$已经很明确了,就是用$\boldsymbol{x}_t$来预测$\boldsymbol{x}_0$的概率,这个部分显然已经没有什么化简空间了,只能直接用模型来建模;另一部分$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$则是属于“自由设计”的范畴,它要求的话便于采样,其中的“约束”则是由一个恒等式$\eqref{eq:margin}$,这也是概率论本身给出的。至于后面的在这个约束之下去设计$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$的过程,确实有些技巧性,这部分没有什么捷径,笔者也是结合已有的扩散模型工作思考了很久,才把这个过程捋清楚的。
总的来说,设计一个模型的时候,要时刻知道自己要什么(“自由”),这个想要的东西有什么限制(“约束”),在明确“自由”与“约束”的前提下,尽量借鉴已有的工作和所学的理论基础,不断往目标凑近。
文章小结 #
本文构建了一个新的扩散模型理论框架(Unified Diffusion Model,UDM),理论上它能够包含现有的生活扩散模型结果,并且允许更一般的扩散方式和数据类型。具体的例子我们下一篇文章再介绍。
转载到请包括本文地址:https://spaces.ac.cn/archives/9262
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Sep. 14, 2022). 《 生成扩散模型漫谈(十):统一扩散模型(理论篇) 》[Blog post]. Retrieved from https://spaces.ac.cn/archives/9262
@online{kexuefm-9262,
title={ 生成扩散模型漫谈(十):统一扩散模型(理论篇)},
author={苏剑林},
year={2022},
month={Sep},
url={\url{https://spaces.ac.cn/archives/9262}},
}

September 22nd, 2022
苏老师您好,其实一直想问,为什么此时可以用解出来的这个ε替换掉Ft−1(x0,ε)中的ε?正向加噪的过程中,并没有规xt和xt-1对应采样的ε是同一个。
感觉这篇文章与DDIM的思想很类似?
既然能自然地推出DDIM,那么自然有相似的地方。
这个问题很好,原因说起来比较复杂。
你说我们没有规定$\boldsymbol{x}_t$和$\boldsymbol{x}_{t-1}$采样的$\boldsymbol{\varepsilon}$是同一个,这很对,但别忘了我们也没有规定$\boldsymbol{x}_t$和$\boldsymbol{x}_{t-1}$采样的$\boldsymbol{\varepsilon}$“不是”同一个。
我们要做的事情是:推导出满足式$\eqref{eq:margin}$的$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$,然后拿来用。我们要推导的是$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$而不是$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_0)$,$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$的解不是唯一的。但我们已经知道,$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)=p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_0)$是一个特殊解,我们希望从这个特殊解中衍生出新的解,衍生的唯一限制还是要满足式$\eqref{eq:margin}$
式$\eqref{eq:margin}$有什么特点呢?它是乘上$p(\boldsymbol{x}_t|\boldsymbol{x}_0)$的一个积分,而$p(\boldsymbol{x}_t|\boldsymbol{x}_0)$是可以重参数的,所以我们可以由$\boldsymbol{x}_t$和$\boldsymbol{x}_0$解出噪声,然后替换$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_0)$的噪声,以衍生出新的$p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0)$。只有当噪声是$\boldsymbol{x}_t$和$\boldsymbol{x}_0$解出的,才能满足式$\eqref{eq:margin}$(这点你可以尝试自己证明一下),比如由$\boldsymbol{x}_{t+1}$和$\boldsymbol{x}_0$解出的就不行。
明白您的意思,但是您还是没有解释为什么要替换。这样的替换相比直接采样有什么优势呢?
如果套用DDIM的思想,其实本质上用x_t+1和x0解出来的也能替换的,相当于原来是跳一步现在是跳2步,这其实就是DDIM。
为什么要替换,正文已经解释过了,通过$\boldsymbol{x}_t$分摊了$\boldsymbol{x}_{t-1}$对$\boldsymbol{x}_0$的部分依赖,使得$\boldsymbol{x}_{t-1}$不再完全依赖于预估的(不特别准确的)$\boldsymbol{x}_0$。
至于为什么必须是$\boldsymbol{x}_t$和$\boldsymbol{x}_0$解出,在@苏剑林|comment-19883已经做了解释,“套用DDIM的思想”并不能得出“$\boldsymbol{x}_{t+1}$和$\boldsymbol{x}_0$解出也可以”的结论。
感谢分享。请问如果把$\epsilon$当成同一个的话,是不是意味着$p(x_{t-1}|x_t,x_0)$一定就是deterministic的,而不是像$g(\epsilon$)$为高斯噪声的情况下是stochastic的?
如果全部替换,那么就是确定的;如果像是$(13)$那样替换一半,那么就还是随机的。
但是有一点要注意,即便将全部噪声$\boldsymbol{\varepsilon}$都用$\boldsymbol{x}_t$和$\boldsymbol{x}_0$解出替换,而不是“都当成同一个”,每个时刻替换的$\boldsymbol{\varepsilon}$还是不一样的。
谢谢您的回复。总结一下,也就是说:(1)如何某种噪声可以具备类似高斯噪声的叠加性,那么就有可能保留一半从而保持随机性;(2)因为$x_t$是不一样的,所以这里的$\epsilon$还是和$t$相关。我这样理解对吗?
是
苏神好,式(12)中的 $\epsilon_{1}$ 和 $\epsilon_{2}$ 分别是什么呢
两个标准正态分布的噪声向量
September 24th, 2022
大佬你好,我感觉极简选择下的前向训练过程很像宋飏博士提出的SMLD?不知道是不是这样
Score Matching with Langevin Dynamics ?
如果是的话,那显然不像啊,只要提到Langevin的,就连(主流的)扩散模型都不是。
September 27th, 2022
很有趣的想法(和超强的动手能力)。
从结果上看,你这里提出的任意(deterministic)噪声前向扩散过程和 Training Objective $(6)$ 式都和 https://arxiv.org/pdf/2208.09392v1.pdf 这篇 cold diffusion 文章有异曲同工之妙。
这里个人有三个小问题想要探讨一下:
1. 关于这个 Training Objective,个人认为这更像是在训练一个 Hierarchical VAE(预测样本$x_0$) 而不是一个 Diffusion model(预测噪声$\epsilon$)。
2. 而且从 cold diffusion 中回头看这篇文章的话,会不会觉得 $(4)$ 式其实也未必重要。因为从点估计直接预测 $x_0 \approx \boldsymbol{\mathcal{G}}_t(\boldsymbol{x}_t)$ 变为从均值为高斯的之后就是将 Training Objective $(6)$ 变为 weighted (当然这为 Sampling 时候加入随机性提供了理论依据).
3. 最后,cold diffusion的效果并不算好,尽管他们提出了改进的采样方法。个人目前的看法是因为之前工作的 Gaussian assumption 使得采样的效率很高 (more analytics),如果换成别的任意噪声,要面临的问题就是(包括但不限于) (1) 如何规划 deterministic forward process; (2) 如何设计一个高效的采样方法。其中关于第一个问题,这篇 soft diffusion (https://arxiv.org/abs/2209.05442) 给出了一个解决方案(似乎又回到了 score SDE 的框架)。
不知道苏神有什么想法?
1、预测噪声还是预测样本,只是参数化方式不一样而已,两者本质是等价的,当拓展到任意变换时,预测样本更加通用;
2、$\eqref{eq:normal}$的提出,只是为了从更一般的概率角度$-\log q(\boldsymbol{x}_0|\boldsymbol{x}_t)$来理解损失函数,以推广到任意数据类型;
3、Cold Diffusion完全放弃了随机性,生成效果必然会有瓶颈的,如果考虑随机性,又因为$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$通常也就只能用正态分布来逼近,因此采样过程中就会涉及到正态噪声,这反过来要求我们训练过程中尽量也训练带有正态噪声的样本,这就隐含了指定了正态噪声的前向过程,所以,兜兜转转,可能还是基于正态分布的扩散是最优解。
September 27th, 2022
@苏剑林|comment-19925
关于第一点,我的理解是尽管只是不一样的参数化方式,但会带来不一样的效果。就和15年的那个文章和DDPM最大的区别可能也正是这个。
ps: 这能加一个评论邮件提醒的功能吗
我感觉最大的区别应该不是这个...
直接训练$\boldsymbol{\mathcal{G}}_t(\boldsymbol{x}_t)$差别不大的...
PS:邮件提醒在国内服务器不好实现啊,我试了几次没成功。
是不是被改进的采样来trade off了
影响模型成功的原因有太多了,算力、U-Net架构和炼丹在其中的作用说不准才是大头。另外,15年的论文也没有得出DDPM训练所用的最终loss(DDPM论文的$(12)$或$(14)$)。总之,理论框架的构建离最终成功的模型还是很远的。
September 29th, 2022
UDM 可以用于TTS取代VITS么?
不了解VITS~
October 18th, 2022
(5)式期望E下应该是xt∼p(xt|x0)吧
是的,已经修正,谢谢
March 6th, 2023
可以说一下式(12)的推导过程吗苏老师,不胜感激
明白了~
April 6th, 2023
想问一个很平庸的问题,式(10)是如何得到式(11)的?
确定性变换对应的概率密度就是狄拉克函数,这算是狄拉克函数的定义?
May 9th, 2023
苏神,请问有没有这篇文章的reference呀 想看看论文细节
这是我自己提出的模型,首发于这篇文章,没有英文paper,细节就是这篇文章。
November 22nd, 2023
consistency models也是$p(x_0|x_t) \rightarrow p(x_{t-1}|x_0)$,而且(似乎)也有$x_t$越接近$x_0$,预测的效果越好的特性。
我想利用consistency models求同一轨迹上的点,主要是想从$x_0$倒推回$x_T$,然后做额外的edit工作。
但不知道为什么想法来源于ODE trajectory的模型,很难求出同一条轨迹上的若干$x_t$。。。而是选择了:从一条生成较差$x_0$的轨迹“跳跃”到另一台轨迹上,这样的一迭代过程。
我还不了解consistency models,但作为一个ODE模型,最终训练完成后的模型不是一个确定的ODE吗?