






26
Dec
高维空间的叉积及其几何意义
By 苏剑林 | 2013-12-26 | 57541位读者 | 引用向量之间的运算有点积和叉积(Cross Product,向量积、外积),其中点积是比较简单的,而且很容易推广到高维;但是叉积不同,一般来说它只不过是三维空间中的东西。叉积的难以推广在于它的多重含义性,如果将向量及其叉积放到张量里边来看(这属于微分形式的内容),那么三维以上的向量叉积是不存在的;但是如果只是把叉积看成是“由两个向量生成第三个与其正交的向量”的工具的话,那么叉积也是可以高维推广的,而且推广的技巧非常巧妙,与三维空间的叉积也非常相似。
回顾三维空间
为了推广三维空间的叉积,首先回顾三维空间的叉积来源是有益的。叉积起源于四元数乘法,但是从目的性来讲,我们希望构造一个向量$\boldsymbol{w}=(w_1,w_2,w_3)$,使得它与已知的两个不共线的向量$\boldsymbol{u}=(u_1,u_2,u_3),\boldsymbol{v}=(v_1,v_2,v_3)$垂直(正交)。从普适性的角度来讲,我们还希望构造出来的向量没有任何“奇点”,为此,我们只用乘法构造。至于叉积的几何意义,则是后话,毕竟,先达到基本的目的再说。
28
Dec
矩阵描述三维空间旋转
By 苏剑林 | 2013-12-28 | 86498位读者 | 引用本节简单介绍用矩阵来描述旋转。在二维平面上,复数无疑是描述旋转的最佳工具;然而推广到三维空间中,却要动用到“四元数”了。为了证明四元数的相关结论,我们需要三维旋转的矩阵描述。最一般的旋转运动为:绕某一根轴旋转$\theta$角度。这样我们就需要三个参数来描述它:确定一根轴至少需要两个参数,确定角度需要一个参数。因此,如果要用“数”来描述三维空间的伸缩和旋转的话,“三元数”显然是不够的,完成这一目的至少需要四元数。这也从另外一个角度反映了三元数的不存在性。
矩阵方法
首先我们认识到,如果旋转轴是坐标轴之一,那么旋转矩阵将是最简单的,比如向量$\boldsymbol{x}=(x_0,y_0,z_0)^{T}$绕$z$轴逆时针旋转$\theta$角后的坐标就可以描述为
$$\begin{equation}
\boldsymbol{R}_{\theta}\boldsymbol{x}\end{equation}$$
28
Dec
《费恩曼物理讲义》在线版
By 苏剑林 | 2013-12-28 | 38888位读者 | 引用
29
Dec
有质动力:倒立单摆的稳定性
By 苏剑林 | 2013-12-29 | 48991位读者 | 引用
5
Jan
不确定性原理的矩阵形式
By 苏剑林 | 2014-01-05 | 40727位读者 | 引用作为量子理论的一个重要定理,不确定性原理总是伴随着物理意义出现的,但是从数学的角度来讲,把不确定性原理的数学形式抽象出来,有助于我们发现更多领域的“不确定性原理”。
本文中,我们将谈及不确定性原理的n维矩阵形式。首先需要解释给大家的是,不确定性原理其实是关于“两个厄密算符与一个单位向量之间的一条不等式”。在量子力学中,厄密算符对应着无穷维的厄密矩阵;而所谓厄密矩阵,就是一个矩阵同时取共轭和转置之后,等于它自身。但是本文讨论一个更简单的情况,那就是n维实矩阵,n维实矩阵中的厄密矩阵就是我们所说的实对称矩阵了。
设$\boldsymbol{x}$是一个$n$维单位向量,即$|\boldsymbol{x}|=1$,而$\boldsymbol{A}$和$\boldsymbol{B}$是n阶实对称矩阵。在量子力学中,$\boldsymbol{x}$就是波函数,但是在这里,它只不过是一个单位实向量;并记$\boldsymbol{I}$是$n$阶单位阵。
考虑
$$\bar{A}=\boldsymbol{x}^{T}\boldsymbol{A}\boldsymbol{x},\bar{B}=\boldsymbol{x}^{T}\boldsymbol{B}\boldsymbol{x}$$
从这些记号可以看出,这些量对应着可观测量的期望值。当然,如果不懂量子力学,可以只看上面的矩阵形式。
11
Mar
一维弹簧的运动(上)
By 苏剑林 | 2014-03-11 | 28134位读者 | 引用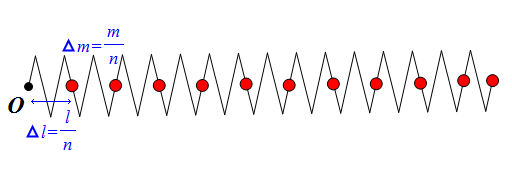
4
Mar
平面曲线的曲率的复数表示
By 苏剑林 | 2014-03-04 | 29079位读者 | 引用开学已经是第二周了,我的《微分几何》也上课两周了,进度比较慢,现在才讲到平面曲线的曲率。在平面曲线$\boldsymbol{t}(t)=(x(t),y(t))$某点上可以找出单位切向量。
$$\boldsymbol{t}=\left(\frac{dx}{ds},\frac{dy}{ds}\right)$$
其中$ds^2 =dx^2+dy^2$,将这个向量逆时针旋转90度之后,就可以定义相应的单位法向量$\boldsymbol{n}$,即$\boldsymbol{t}\cdot\boldsymbol{n}=0$。
常规写法
让我们用弧长$s$作为参数来描述曲线方程,$\boldsymbol{t}(s)=(x(s),y(s))$,函数上的一点表示对$s$求导。那么我们来考虑$\dot{\boldsymbol{t}}$,由于$\boldsymbol{t}^2=1$,对s求导得到
$$\boldsymbol{t}\cdot\dot{\boldsymbol{t}}=0$$
13
Mar
一维弹簧的运动(下)
By 苏剑林 | 2014-03-13 | 26423位读者 | 引用在上一篇文章中,我们得到了一维弹簧运动的方程
$$m\frac{\partial^2 X}{\partial t^2}=k\frac{\partial^2 X}{\partial \xi^2}$$
并且得到了通解
$$X=F(u)+H(v)=F(\xi+\beta t)+H(\xi-\beta t)$$
或者
$$X(\xi,t)=\frac{1}{2}\left[X_0(\xi+\beta t)+X_0(\xi-\beta t)\right]+\frac{1}{2\beta}\int_{\xi-\beta t}^{\xi+\beta t} X_1 (s)ds$$
在文章的末尾,提到过这个解是有些问题的。现在让我们来详细分析它。

最近评论