






28
Dec
矩阵描述三维空间旋转
By 苏剑林 | 2013-12-28 | 89851位读者 | 引用本节简单介绍用矩阵来描述旋转。在二维平面上,复数无疑是描述旋转的最佳工具;然而推广到三维空间中,却要动用到“四元数”了。为了证明四元数的相关结论,我们需要三维旋转的矩阵描述。最一般的旋转运动为:绕某一根轴旋转$\theta$角度。这样我们就需要三个参数来描述它:确定一根轴至少需要两个参数,确定角度需要一个参数。因此,如果要用“数”来描述三维空间的伸缩和旋转的话,“三元数”显然是不够的,完成这一目的至少需要四元数。这也从另外一个角度反映了三元数的不存在性。
矩阵方法
首先我们认识到,如果旋转轴是坐标轴之一,那么旋转矩阵将是最简单的,比如向量$\boldsymbol{x}=(x_0,y_0,z_0)^{T}$绕$z$轴逆时针旋转$\theta$角后的坐标就可以描述为
$$\begin{equation}
\boldsymbol{R}_{\theta}\boldsymbol{x}\end{equation}$$
29
Dec
有质动力:倒立单摆的稳定性
By 苏剑林 | 2013-12-29 | 50471位读者 | 引用
13
Mar
一维弹簧的运动(下)
By 苏剑林 | 2014-03-13 | 27152位读者 | 引用在上一篇文章中,我们得到了一维弹簧运动的方程
$$m\frac{\partial^2 X}{\partial t^2}=k\frac{\partial^2 X}{\partial \xi^2}$$
并且得到了通解
$$X=F(u)+H(v)=F(\xi+\beta t)+H(\xi-\beta t)$$
或者
$$X(\xi,t)=\frac{1}{2}\left[X_0(\xi+\beta t)+X_0(\xi-\beta t)\right]+\frac{1}{2\beta}\int_{\xi-\beta t}^{\xi+\beta t} X_1 (s)ds$$
在文章的末尾,提到过这个解是有些问题的。现在让我们来详细分析它。
在查找量子化有关资料的时候,笔者查找到了一系列名为《漫谈几何量子化》的文章,并进一步查询得知,作者为季候风,原来发表在繁星客栈(顺便提一下,繁星客栈是最早的理论物理论坛之一,现在已经不能发帖了,但是上面很多资料都弥足珍贵),据说这是除正则量子化和路径积分量子化外的第三种量子化方法。网上鲜有几何量子化的资料,更不用说是中文资料了,于是季候风前辈的这一十五篇文章便显得格外有意义了。
然而,虽然不少网站都转载了这系列文章,但是无一例外地,文章中的公式图片已经失效了,后来笔者在百度网盘那找到其中的十四篇pdf格式的(估计是网友在公式图片失效前保存下来的),笔者通过替换公式服务器的方式找回了第十五篇,把第十五篇也补充进去了。(见漫谈几何量子化(原文档).zip)
虽然这样已经面前能够阅读了,但是总感觉美中不足,虽然笔者花了三天时间把文章重新用$\LaTeX$录入了,主要是把公式重新录入了,简单地排版了一下。现放出来与大家分享。
在学车的时候,我堂大哥曾问我一道作圆的问题:
三圆的外切圆和内切圆 (1)
平面上给出三个两两相切的圆以及它们的圆心,求作一个圆与这三个圆都相切(尺规作图)。
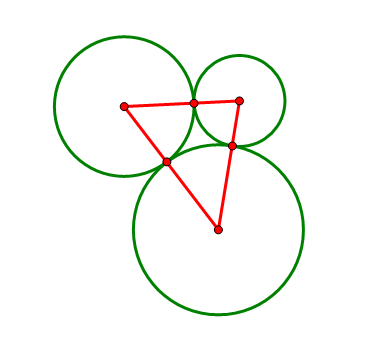
如果从纯几何的途径入手,我们甚至很难判断这样的圆是否存在。但是我之前似乎已经看过类似的题目,于是很快想到一个名词:反演。反演可以将圆反演成直线(圆过反演点),也可以将圆反演成圆(圆不过反演点),而其他的相切、相交等关系保持不变。对反演后的图形进行相同的反演,就变回原来的图形。本题的难点在于圆太多,利用反演,我们可以将它变为两条直线和一个圆的问题。
假设读者已经有了反演的基本知识,如果没有,请到
http://zh.wikipedia.org/wiki/反演
阅读相关内容。
30
Jan
三个相切圆的公切圆:补充
By 苏剑林 | 2014-01-30 | 27142位读者 | 引用
1
Jul
勾股数的通解及其推广
By 苏剑林 | 2014-07-01 | 21685位读者 | 引用在之前的文章《几何的数与数的几何:超复数的浅探究》中,我们谈及过四元数。四元数源于把复数的$|(a+bi)(c+di)|=|a+bi|\times|c+di|$这一独特的性质进行高维推广。为什么偏爱这一性质?读者或许已经初步知道一些用到复数的这一性质的例子,有几何方面的,也有物理方面的,这一性质为处理模长相关问题带来了美妙的方便。本文介绍它在求三元二次齐次不定方程的整数通解中的应用,这一例子同样展示了复数这一性质的神奇,让我们不得不认同当初哈密顿为了将其推广到高维而不惜耗费十年光阴的努力。
勾股数问题
读者或许已经知道,勾股数,也就是满足
$$x^2+y^2=z^2$$
的所有自然数解,由下面公式给出
$$x=a^2-b^2,\quad y=2ab,\quad z=a^2+b^2$$

最近评论