






19
Feb
Python的多进程编程技巧
By 苏剑林 | 2017-02-19 | 37564位读者 | 引用过程
在Python中,如果要多进程运算,一般是通过multiprocessing来实现的,常用的是multiprocessing中的进程池,比如:
from multiprocessing import Pool
import time
def f(x):
time.sleep(1)
print x+1
return x+1
a = range(10)
pool = Pool(4)
b = pool.map(f, a)
pool.close()
pool.join()
print b
这样写简明清晰,确实方便,有趣的是,只需要将multiprocessing换成multiprocessing.dummy,就可以将程序从多进程改为多线程了。
25
Apr
将“Softmax+交叉熵”推广到多标签分类问题
By 苏剑林 | 2020-04-25 | 322135位读者 | 引用(注:本文的相关内容已整理成论文《ZLPR: A Novel Loss for Multi-label Classification》,如需引用可以直接引用英文论文,谢谢。)
一般来说,在处理常规的多分类问题时,我们会在模型的最后用一个全连接层输出每个类的分数,然后用softmax激活并用交叉熵作为损失函数。在这篇文章里,我们尝试将“Softmax+交叉熵”方案推广到多标签分类场景,希望能得到用于多标签分类任务的、不需要特别调整类权重和阈值的loss。

类别不平衡
单标签到多标签
一般来说,多分类问题指的就是单标签分类问题,即从$n$个候选类别中选$1$个目标类别。假设各个类的得分分别为$s_1,s_2,
\dots,s_n$,目标类为$t\in\{1,2,\dots,n\}$,那么所用的loss为
\begin{equation}-\log \frac{e^{s_t}}{\sum\limits_{i=1}^n e^{s_i}}= - s_t + \log \sum\limits_{i=1}^n e^{s_i}\label{eq:log-softmax}\end{equation}
这个loss的优化方向是让目标类的得分$s_t$变为$s_1,s_2,\dots,s_t$中的最大值。关于softmax的相关内容,还可以参考《寻求一个光滑的最大值函数》、《函数光滑化杂谈:不可导函数的可导逼近》等文章。
7
Sep
动手做个DialoGPT:基于LM的生成式多轮对话模型
By 苏剑林 | 2020-09-07 | 98440位读者 | 引用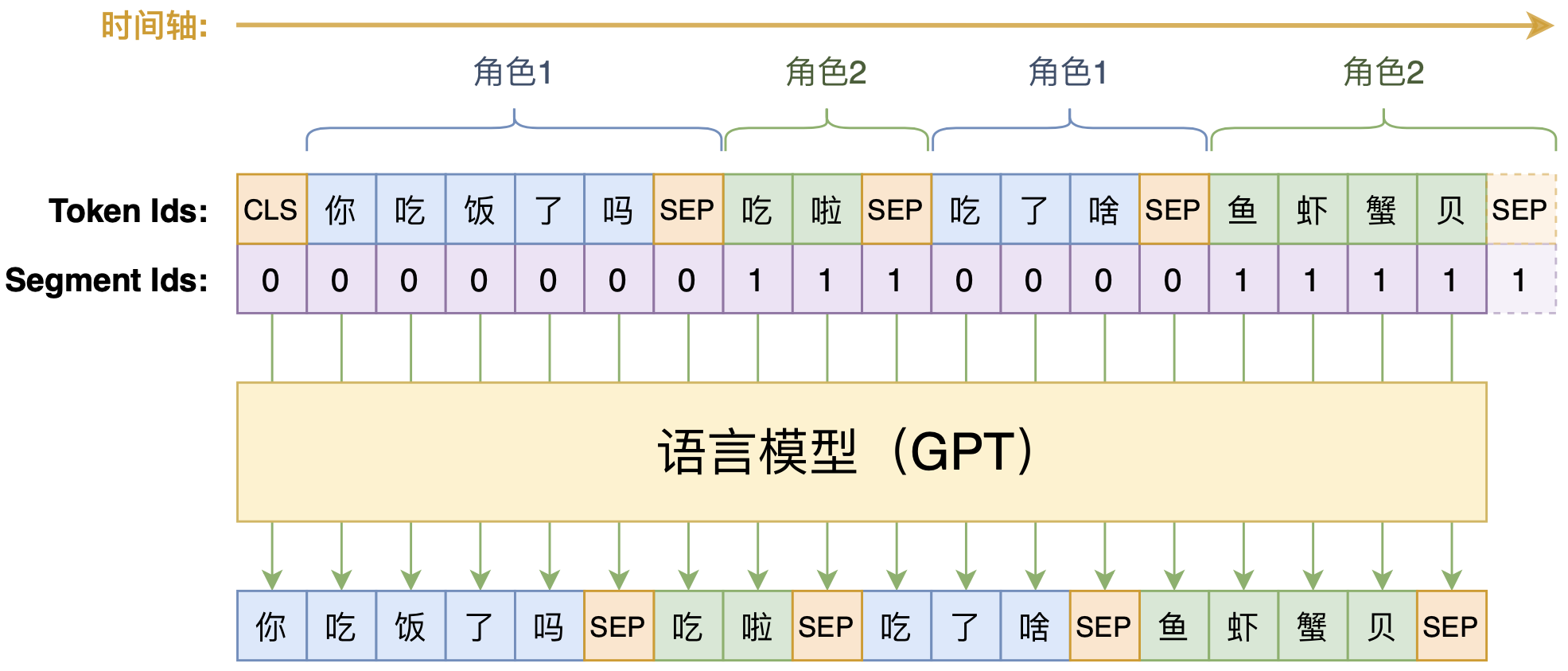
16
Apr
搜狐文本匹配:基于条件LayerNorm的多任务baseline
By 苏剑林 | 2021-04-16 | 84538位读者 | 引用前段时间看到了“2021搜狐校园文本匹配算法大赛”,觉得赛题颇有意思,便尝试了一下,不过由于比赛本身只是面向在校学生,所以笔者是不能作为正式参赛人员参赛的,因此把自己的做法开源出来,作为比赛baseline供大家参考。
赛题介绍
顾名思义,比赛的任务是文本匹配,即判断两个文本是否相似,本来是比较常规的任务,但有意思的是它分了多个子任务。具体来说,它分A、B两大类,A类匹配标准宽松一些,B类匹配标准严格一些,然后每个大类下又分为“短短匹配”、“短长匹配”、“长长匹配”3个小类,因此,虽然任务类型相同,但严格来看它是六个不同的子任务。
8
Jul
两个多元正态分布的KL散度、巴氏距离和W距离
By 苏剑林 | 2021-07-08 | 99230位读者 | 引用正态分布是最常见的连续型概率分布之一。它是给定均值和协方差后的最大熵分布(参考《“熵”不起:从熵、最大熵原理到最大熵模型(二)》),也可以看作任意连续型分布的二阶近似,它的地位就相当于一般函数的线性近似。从这个角度来看,正态分布算得上是最简单的连续型分布了。也正因为简单,所以对于很多估计量来说,它都能写出解析解来。
本文主要来计算两个多元正态分布的几种度量,包括KL散度、巴氏距离和W距离,它们都有显式解析解。
正态分布
这里简单回顾一下正态分布的一些基础知识。注意,仅仅是回顾,这还不足以作为正态分布的入门教程。
概率密度
正态分布,也即高斯分布,是定义在$\mathbb{R}^n$上的连续型概率分布,其概率密度函数为
\begin{equation}p(\boldsymbol{x})=\frac{1}{\sqrt{(2\pi)^n \det(\boldsymbol{\Sigma})}}\exp\left\{-\frac{1}{2}(\boldsymbol{x}-\boldsymbol{\mu})^{\top}\boldsymbol{\Sigma}^{-1}(\boldsymbol{x}-\boldsymbol{\mu})\right\}\end{equation}
25
Jan
Efficient GlobalPointer:少点参数,多点效果
By 苏剑林 | 2022-01-25 | 114066位读者 | 引用在《GlobalPointer:用统一的方式处理嵌套和非嵌套NER》中,我们提出了名为“GlobalPointer”的token-pair识别模块,当它用于NER时,能统一处理嵌套和非嵌套任务,并在非嵌套场景有着比CRF更快的速度和不逊色于CRF的效果。换言之,就目前的实验结果来看,至少在NER场景,我们可以放心地将CRF替换为GlobalPointer,而不用担心效果和速度上的损失。
在这篇文章中,我们提出GlobalPointer的一个改进版——Efficient GlobalPointer,它主要针对原GlobalPointer参数利用率不高的问题进行改进,明显降低了GlobalPointer的参数量。更有趣的是,多个任务的实验结果显示,参数量更少的Efficient GlobalPointer反而还取得更好的效果。
大量的参数
这里简单回顾一下GlobalPointer,详细介绍则请读者阅读《GlobalPointer:用统一的方式处理嵌套和非嵌套NER》。简单来说,GlobalPointer是基于内积的token-pair识别模块,它可以用于NER场景,因为对于NER来说我们只需要把每一类实体的“(首, 尾)”这样的token-pair识别出来就行了。
7
May
多标签“Softmax+交叉熵”的软标签版本
By 苏剑林 | 2022-05-07 | 45845位读者 | 引用(注:本文的相关内容已整理成论文《ZLPR: A Novel Loss for Multi-label Classification》,如需引用可以直接引用英文论文,谢谢。)
在《将“Softmax+交叉熵”推广到多标签分类问题》中,我们提出了一个用于多标签分类的损失函数:
\begin{equation}\log \left(1 + \sum\limits_{i\in\Omega_{neg}} e^{s_i}\right) + \log \left(1 + \sum\limits_{j\in\Omega_{pos}} e^{-s_j}\right)\label{eq:original}\end{equation}
这个损失函数有着单标签分类中“Softmax+交叉熵”的优点,即便在正负类不平衡的依然能够有效工作。但从这个损失函数的形式我们可以看到,它只适用于“硬标签”,这就意味着label smoothing、mixup等技巧就没法用了。本文则尝试解决这个问题,提出上述损失函数的一个软标签版本。
巧妙联系
多标签分类的经典方案就是转化为多个二分类问题,即每个类别用sigmoid函数$\sigma(x)=1/(1+e^{-x})$激活,然后各自用二分类交叉熵损失。当正负类别极其不平衡时,这种做法的表现通常会比较糟糕,而相比之下损失$\eqref{eq:original}$通常是一个更优的选择。
8
Jul
“闭门造车”之多模态思路浅谈(二):自回归
By 苏剑林 | 2024-07-08 | 38088位读者 | 引用这篇文章我们继续来闭门造车,分享一下笔者最近对多模态学习的一些新理解。
在前文《“闭门造车”之多模态思路浅谈(一):无损输入》中,我们强调了无损输入对于理想的多模型模态的重要性。如果这个观点成立,那么当前基于VQ-VAE、VQ-GAN等将图像离散化的主流思路就存在能力瓶颈,因为只需要简单计算一下信息熵就可以表明离散化必然会有严重的信息损失,所以更有前景或者说更长远的方案应该是输入连续型特征,比如直接将图像的原始像素特征Patchify后输入到模型中。
然而,连续型输入对于图像理解自然简单,但对图像生成来说则引入了额外的困难,因为非离散化无法直接套用文本的自回归框架,多少都要加入一些新内容如扩散,这就引出了本文的主题——如何进行多模态的自回归学习与生成。当然,非离散化只是表面的困难,更艰巨的部份还在后头...
无损含义
首先我们再来明确一下无损的含义。无损并不是指整个计算过程中一丁点损失都不能有,这不现实,也不符合我们所理解的深度学习的要义——在2015年的文章《闲聊:神经网络与深度学习》我们就提到过,深度学习成功的关键是信息损失。所以,这里无损的含义很简单,单纯是希望作为模型的输入来说尽可能无损。

最近评论