






6
Sep
“闭门造车”之多模态思路浅谈(三):位置编码
By 苏剑林 | 2024-09-06 | 133509位读者 |在前面的文章中,我们曾表达过这样的观点:多模态LLM相比纯文本LLM的主要差异在于,前者甚至还没有形成一个公认为标准的方法论。这里的方法论,不仅包括之前讨论的生成和训练策略,还包括一些基础架构的设计,比如本文要谈的“多模态位置编码”。
对于这个主题,我们之前在《Transformer升级之路:17、多模态位置编码的简单思考》就已经讨论过一遍,并且提出了一个方案(RoPE-Tie)。然而,当时笔者对这个问题的思考仅处于起步阶段,存在细节考虑不周全、认识不够到位等问题,所以站在现在的角度回看,当时所提的方案与完美答案还有明显的距离。
因此,本文我们将自上而下地再次梳理这个问题,并且给出一个自认为更加理想的结果。
多模位置 #
多模态模型居然连位置编码都没有形成共识,这一点可能会让很多读者意外,但事实上确实如此。对于文本LLM,目前主流的位置编码是RoPE(RoPE就不展开介绍了,假设读者已经熟知),更准确来说是RoPE-1D,因为原始设计只适用于1D序列。后来我们推导了RoPE-2D,这可以用于图像等2D序列,按照RoPE-2D的思路我们可以平行地推广到RoPE-3D,用于视频等3D序列。
然而,以上说的只是单一模态输入,当多种模态混合输入时,困难就出现了:文本是1D序列,所以它的位置只是一个标量$n$;图像是2D的(“宽”和“高”),所以表达它的位置需要一个二维向量$(x,y)$;视频则在图像的基础上新增了一个时间维度(或者说“帧”),所以它的位置是一个三维向量$(x,y,z)$。当我们希望用同一个模型去处理三种模态的数据时,就要想办法糅合这三种不同形式的位置信息。
大家都知道,RoPE在实现上是绝对位置编码,但结合基于内积的Attention来用时,内积之后位置会自动作差,从而实现了相对位置编码的效果。可同一大小的向量可以作差,不同大小的向量怎么作差呢?这就是多模态位置编码的困难所在。
不少工作选择“逃避”这个困难,直接Flatten所有模态然后使用RoPE-1D,这不失为一种解决办法,但终究显得不够优雅。此外,强行Flatten也可能会降低模型性能的天花板,因为《VisionLLaMA: A Unified LLaMA Backbone for Vision Tasks》等工作已经表明,RoPE-2D的引入有助于提升模型效果尤其是变分辨率输入的效果。
向后兼容 #
所以,我们希望设计一种多模态位置编码,它既可以多模态混合使用,在单模态下又能退化为对应的RoPE-1D/2D/3D,以充分解锁每个模态的能力。
刚才我们说,多模态位置编码的主要困难是不同大小的位置向量无法作差,既要保留完整的位置信息又要允许作差,那么我们就只能统一升维到最高维度。下面我们以图文混合模态为例,由于图像是2D的,所以我们将文本的位置编码也提升到二维,然后统一用RoPE-2D。怎么升维都可以吗?并不是,我们希望它具有向后的兼容性,即当输入是纯文本时,它跟RoPE-1D完全等价。
为此,我们对比一下RoPE-1D与RoPE-2D:
$$\scriptsize{\begin{array}{c}\begin{array}{c}\text{RoPE-1D}\\ (\boldsymbol{\mathcal{R}}_n)\end{array}= \begin{pmatrix}
\cos \bbox[yellow]{n}\theta_0 & -\sin \bbox[yellow]{n}\theta_0 & 0 & 0 & \cdots & 0 & 0 & 0 & 0 \\
\sin \bbox[yellow]{n}\theta_0 & \cos \bbox[yellow]{n}\theta_0 & 0 & 0 & \cdots & 0 & 0 & 0 & 0 \\
0 & 0 & \cos \bbox[yellow]{n}\theta_1 & -\sin \bbox[yellow]{n}\theta_1 & \cdots & 0 & 0 & 0 & 0 \\
0 & 0 & \sin \bbox[yellow]{n}\theta_1 & \cos \bbox[yellow]{n}\theta_1 & \cdots & 0 & 0 & 0 & 0 \\
\vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots & \vdots & \vdots \\
0 & 0 & 0 & 0 & \cdots & \cos \bbox[yellow]{n}\theta_{d/2-2} & -\sin \bbox[yellow]{n}\theta_{d/2-2} & 0 & 0 \\
0 & 0 & 0 & 0 & \cdots & \sin \bbox[yellow]{n}\theta_{d/2-2} & \cos \bbox[yellow]{n}\theta_{d/2-2} & 0 & 0 \\
0 & 0 & 0 & 0 & \cdots & 0 & 0 & \cos \bbox[yellow]{n}\theta_{d/2-1} & -\sin \bbox[yellow]{n}\theta_{d/2-1} \\
0 & 0 & 0 & 0 & \cdots & 0 & 0 & \sin \bbox[yellow]{n}\theta_{d/2-1} & \cos \bbox[yellow]{n}\theta_{d/2-1} \\
\end{pmatrix} \\[16pt]
\begin{array}{c}\text{RoPE-2D}\\ (\boldsymbol{\mathcal{R}}_{x,y})\end{array}= \begin{pmatrix}
\cos \bbox[yellow]{x}\theta_0 & -\sin \bbox[yellow]{x}\theta_0 & 0 & 0 & \cdots & 0 & 0 & 0 & 0 \\
\sin \bbox[yellow]{x}\theta_0 & \cos \bbox[yellow]{x}\theta_0 & 0 & 0 & \cdots & 0 & 0 & 0 & 0 \\
0 & 0 & \cos \bbox[yellow]{y}\theta_1 & -\sin \bbox[yellow]{y}\theta_1 & \cdots & 0 & 0 & 0 & 0 \\
0 & 0 & \sin \bbox[yellow]{y}\theta_1 & \cos \bbox[yellow]{y}\theta_1 & \cdots & 0 & 0 & 0 & 0 \\
\vdots & \vdots & \vdots & \vdots & \ddots & \vdots & \vdots & \vdots & \vdots \\
0 & 0 & 0 & 0 & \cdots & \cos \bbox[yellow]{x}\theta_{d/2-2} & -\sin \bbox[yellow]{x}\theta_{d/2-2} & 0 & 0 \\
0 & 0 & 0 & 0 & \cdots & \sin \bbox[yellow]{x}\theta_{d/2-2} & \cos \bbox[yellow]{x}\theta_{d/2-2} & 0 & 0 \\
0 & 0 & 0 & 0 & \cdots & 0 & 0 & \cos \bbox[yellow]{y}\theta_{d/2-1} & -\sin \bbox[yellow]{y}\theta_{d/2-1} \\
0 & 0 & 0 & 0 & \cdots & 0 & 0 & \sin \bbox[yellow]{y}\theta_{d/2-1} & \cos \bbox[yellow]{y}\theta_{d/2-1} \\
\end{pmatrix}\end{array}}$$
发现什么共同点了吗?如果单看这个形式,可以发现其实有$\boldsymbol{\mathcal{R}}_n=\boldsymbol{\mathcal{R}}_{n,n}$,即位置为$n$的RoPE-1D跟位置为$(n,n)$的RoPE-2D其实是等价的,所以要想在图文混合中统一用RoPE-2D,并且对于纯文本能退化为RoPE-1D,那么就要将文本部分的位置坐标取为$(n,n)$的形式。
当然,实际上它们还是有少许不同的,我们知道对于RoPE-1D有$\theta_i = b^{-2i/d}$,也就是$\theta_{2j}$跟$\theta_{2j+1}$是不同的,但对于RoPE-2D来说,为了确保$x,y$的对称性,通常的选择是确保$\theta_{2j}=\theta_{2j+1}$,这就产生了矛盾之处。对此,我们有两种选择:一是放弃RoPE-2D中$x,y$的对称性,依旧取$\theta_i = b^{-2i/d}$;二是取$\theta_{2j}=\theta_{2j+1}=b^{-4j/d}$,此时纯文本部分的位置编码就跟已有RoPE-1D略有不同。对于$\theta_i = b^{-2i/d}$来说,$\theta_i$与$\theta_{i+1}$差别不大,所以两种方案其实都差不多,选哪一种取决于个人的审美,笔者倾向于选择第一种。
等价对称 #
通过上述分析,我们确定了图文混合模态统一用RoPE-2D的方案,并且由向后兼容性确定了位置$n$的文本Token的二维位置应该取$(n,n)$,从而完成了文本部分的位置编码设计。接下来,我们需要构思的是图像部分的位置编码。
如果输入只有一张$w\times h$个Patch的图像,那么它的位置坐标自然就是各个Patch本身的坐标,即
\begin{equation}\left[\begin{matrix}
(1,1) & (1,2) & \cdots & (1, w) \\
(2,1) & (2,2) & \cdots & (2, w) \\
\vdots & \vdots & \ddots & \vdots \\
(h,1) & (h,2) & \cdots & (h, w) \\
\end{matrix}\right]\label{eq:rope2d}\end{equation}
我们这展示的是绝对位置,但实际的效果是相对位置,相对位置的特点是跟位置偏置无关,所以我们可以给每个坐标都加上$(\beta_1,\beta_2)$而不改变效果;其次,我们可以给每个坐标都乘以$(\gamma_1,\gamma_2)$,这样允许我们按需调整相邻位置的间隔。将这两点结合起来,我们可以得到图像的一般化二维位置为
\begin{equation}\left[\begin{matrix}
(\beta_1 + \gamma_1,\beta_2 + \gamma_2) & (\beta_1 + \gamma_1,\beta_2 + 2\gamma_2) & \cdots & (\beta_1 + \gamma_1,\beta_2 + w\gamma_2) \\[8pt]
(\beta_1 + 2\gamma_1,\beta_2 + \gamma_2) & (\beta_1 + 2\gamma_1,\beta_2 + 2\gamma_2) & \cdots & (\beta_1 + 2\gamma_1,\beta_2 + w\gamma_2) \\[8pt]
\vdots & \vdots & \ddots & \vdots \\[8pt]
(\beta_1 + h\gamma_1,\beta_2 + \gamma_2) & (\beta_1 + h\gamma_1,\beta_2 + 2\gamma_2) & \cdots & (\beta_1 + h\gamma_1,\beta_2 + w\gamma_2)
\end{matrix}\right]\end{equation}
现在我们考虑左右两段文本夹着中间一张图像时,$\beta_1,\beta_2,\gamma_1,\gamma_2$该怎么选取。
首先,我们假设文本的Token和Patch具有一定的等价性:经过合理的Patchify后每个Patch的地位跟Token等价(An Image is Worth xxx Tokens),这意味着对于两段文本来说,它们相当于夹着一个$wh$个Token的句子,所以如果左段文本最后一个Token的位置是$(L,L)$,那么右段文本第一个Token的位置就是$(L+wh+1, L + wh + 1)$。
接着,我们还需要引入对称性——具体来说,图像的第一个Patch的位置是$(\beta_1 + \gamma_1,\beta_2 + \gamma_2)$,最后一个Patch的位置是$(\beta_1 + h\gamma_1,\beta_2 + w\gamma_2)$,我们认为【图像第一个Patch】与【左段文本最后一个Token】的位置差,等于【右段文本第一个Token】与【图像最后一个Patch】的位置差,即
\begin{equation}\begin{pmatrix}\beta_1 + \gamma_1 \\ \beta_2 + \gamma_2\end{pmatrix} - \begin{pmatrix}L \\ L\end{pmatrix} = \begin{pmatrix}L+wh+1 \\ L+wh+1\end{pmatrix} - \begin{pmatrix}\beta_1 + h\gamma_1 \\ \beta_2 + w\gamma_2\end{pmatrix}\label{eq:beta-gamma}\end{equation}
这里边有四个未知数$\beta_1,\beta_2,\gamma_1,\gamma_2$,但只有两个等式,所以有无穷多组解。我们可以简单地取$\gamma_1=\gamma_2=1$,继而解得
\begin{equation}\beta_1 = L + \frac{1}{2}(wh - h),\quad \beta_2 = L + \frac{1}{2}(wh - w)\end{equation}
这个方案我们暂时可以称之为RoPE-Tie-v2或者RoPE-TV(RoPE for Text and Vision)吧。
优劣分析 #
根据这个结果,当句子后面接一张$w\times h$的图像时,只需要按照上述计算计算出$(\beta_1,\beta_2)$,然后加到常规的二维RoPE $\eqref{eq:rope2d}$中去,就得到了图像部分的位置坐标了,如下图所示
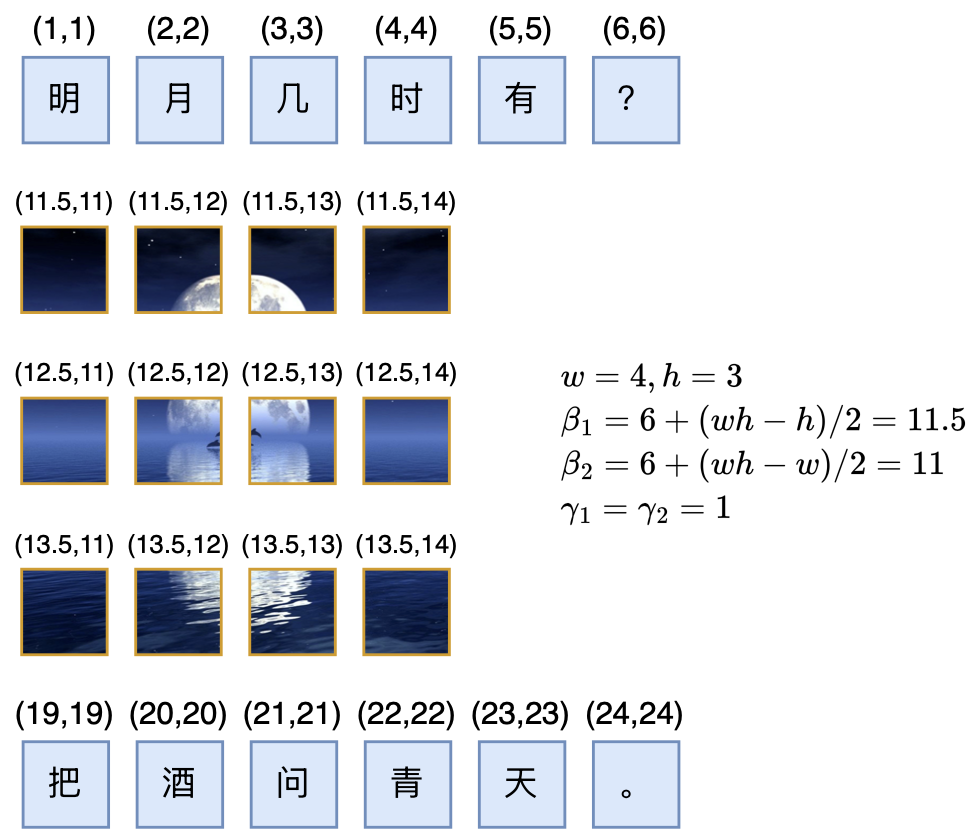
新版RoPE-TV(RoPE-Tie-v2)示意图
作为对比,我们在《Transformer升级之路:17、多模态位置编码的简单思考》提出的旧版RoPE-Tie,其位置坐标如下图所示:
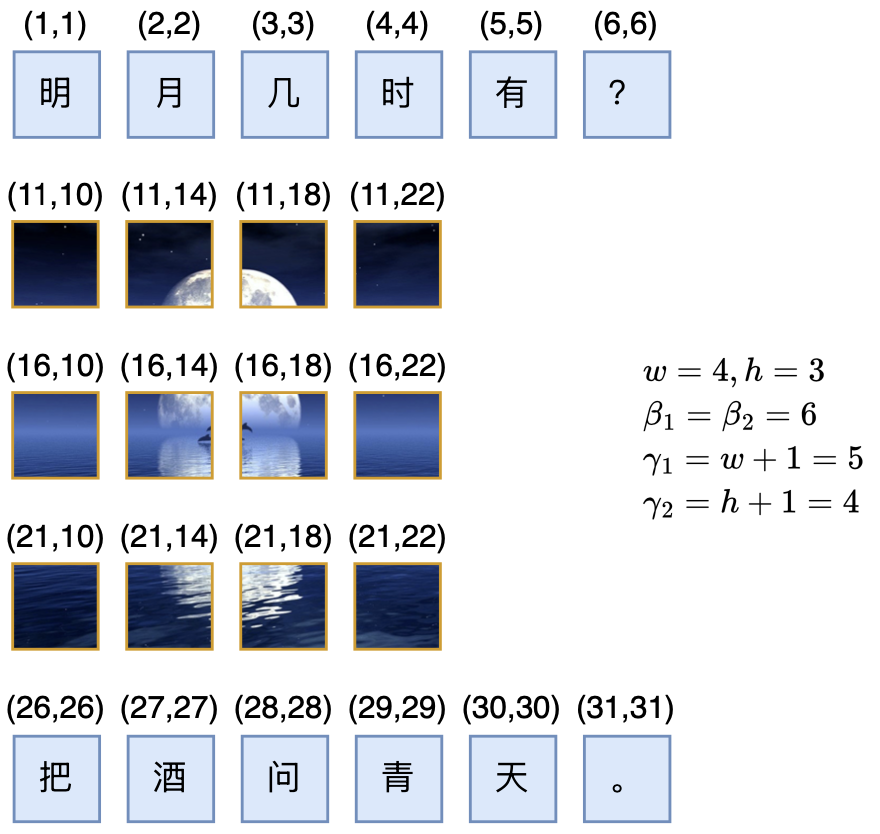
旧版RoPE-Tie示意图
事实上,RoPE-Tie的出发点同样包括兼容性和对称性,但没有严格遵循等价性,并且RoPE-Tie默认了$\beta_1=\beta_2=L$,以及没有限定$w\times h$个Patch等价于$wh$个Token,最终推出了一组整数解(如果不要求整数解也可以满足等价性):
\begin{equation}\gamma_1 = w+1,\quad\gamma_2=h+1\end{equation}
从如今的视角来看,RoPE-Tie的默认设置其实并不是很理想,所以本文重新选择了$\gamma_1=\gamma_2=1$,并确保等价性,然后反推出$\beta_1,\beta_2$。
那新方案有什么好处呢?首先,RoPE-Tie中图像内的相对位置跟它的大小有关,而新方案中Patch的间隔是固定的$(0,1)$和$(1,0)$,这可以让Patch的尺度更为一致。举个例子,一张128*128的图像以及该图的上半部份(即128*64的子图),由于两者高度不一样,所以RoPE-Tie后它们横向的位置间隔并不一样,这意味着同样位置、同样含义的两个Patch在加了RoPE-Tie后的距离(尺度)变得不一致了,这看起来并不合理,而新方案没有这个问题。
其次,RoPE-Tie中图像与左右文本的间隔,跟图像内部Patch的间隔一样都是$(\gamma_1,\gamma_2)$,而新方案中文本到图像、图像到文本之间会出现一个比较大的间隔$\frac{1}{2}(wh - h, wh-w)$,然后文本内部、图像内部则都是固定的均匀间隔。直觉上,这种不同模态之间比较大的位置跳跃,可以更好地实现“模态隔离”,让单个模型既能更好地处理单模态内容,又保留了多模态之间的交互,这跟我们通常在左右加[IMG]和[/IMG]两个Special Token来标记出图像具有异曲同工之处。
三维困境 #
在RoPE-Tie的文章中,并没有讨论到“文本-视频”混合模态的位置编码,这一节我们来补充讨论完整。
直观来看,对于视频输入我们可以有两种处理方式。第一种方式就是简单地将视频当成多张图片处理(必要时加个[VIDEO]、[/VIDEO]的标记),这样我们就不需要针对视频提出新的位置编码了,沿用“文本-图像”的混合位置编码结果就行,但这样丧失了同一视频不同帧之间的对齐关系,可能不是太完美,例如“第1帧的第1个Patch”跟“第2帧的第1个Patch”和“第1帧的第2个Patch”,应该有差不多的邻近关系,但展平当多张图片处理就体现不出这一点。
第二种方式则是将“文本-图像”的结果平行地推广到“文本-视频”中。对于一个$w\times h\times t$的视频(画面为$w\times h$,一共$t$帧),它的位置坐标是三维的$(x,y,z)$,根据相同的兼容性、等价性和对称性,我们可以将方程$\eqref{eq:beta-gamma}$推广成
\begin{equation}\begin{pmatrix}\beta_1 + \gamma_1 \\ \beta_2 + \gamma_2 \\ \beta_3 + \gamma_3\end{pmatrix} - \begin{pmatrix}L \\ L \\ L\end{pmatrix} = \begin{pmatrix}L+wht+1 \\ L+wht+1 \\ L+wht+1\end{pmatrix} - \begin{pmatrix}\beta_1 + h\gamma_1 \\ \beta_2 + w\gamma_2 \\ \beta_3 + t\gamma_3\end{pmatrix}\end{equation}
如果还是设$\gamma_1=\gamma_2=\gamma_3=1$,我们得到
\begin{equation}\beta_1 = L + \frac{1}{2}(wht - h),\quad \beta_2 = L + \frac{1}{2}(wht - w),\quad \beta_3 = L + \frac{1}{2}(wht - t)\end{equation}
这样做完整了保留了视频位置的三维性,看起来会更优雅一些,但笔者认为它仍有一些美中不足之处。
这个美中不足源于笔者对视频的时间维度的不同理解:视频的三维,实际上是“2个空间维度+1个时间维度”,跟真实世界的三维立体的“3个空间维度”不一样。按照笔者的观点,视频的时间维度跟两个空间维度是不平权的,时间维度更像是文本从左往右的书写方向,所以笔者想象中的完美多模态LLM,应该能像文本LLM续写文本一样,理论上能够以自回归的方式无限地续作视频,直到出现[EOS]标记。
刚才我们提了两种“文本-视频”混合编码方案,第一种直接当作多张图片处理,这种方案是可以无限自回归生成视频的,但第二种看上去更完美的方案反而不行,因为它的$\beta_1,\beta_2,\beta_3$是依赖于$t$的,这意味着我们需要提前知道生成多少帧的视频,换句话说,第二种方案并不是不能用自回归的方式生成视频,而是需要提前确定帧数,这在笔者看来是不符合时间维度的理想特性的(时间,应该可以无约束地往前推进)。
可能有读者疑问:为什么图像就不介意$\beta_1,\beta_2$中依赖于$w,h$呢?也就是说为什么图像生成不介意事先知道图像大小呢?这是因为图像有两个方向,就算我们用自回归的方式生成图像,也必须至少知道一个方向的大小,才能告诉模型及时“换行”,以生成一张完整的二维图像。而图像的两个空间维度是平权的,单知其一倒不如全部知道,所以我们能够接受事先确定图像大小。
此外,我们还可以用《“闭门造车”之多模态思路浅谈(一):无损输入》介绍的“AR+Diffusion”做“文本-图像”模型,此时图像生成部分是Diffusion,就必须提前知道目标图像大小了。
相关工作 #
前段时间,阿里开源了名为“Qwen2-VL”的多模态模型,介绍中提到自己提出了一种多模态旋转位置编码(M-ROPE),引起了笔者的兴趣。经过阅读源码(链接),发现M-RoPE实际上就是沿用了RoPE-Tie的兼容性思想,但没有保留对称性和等价性。
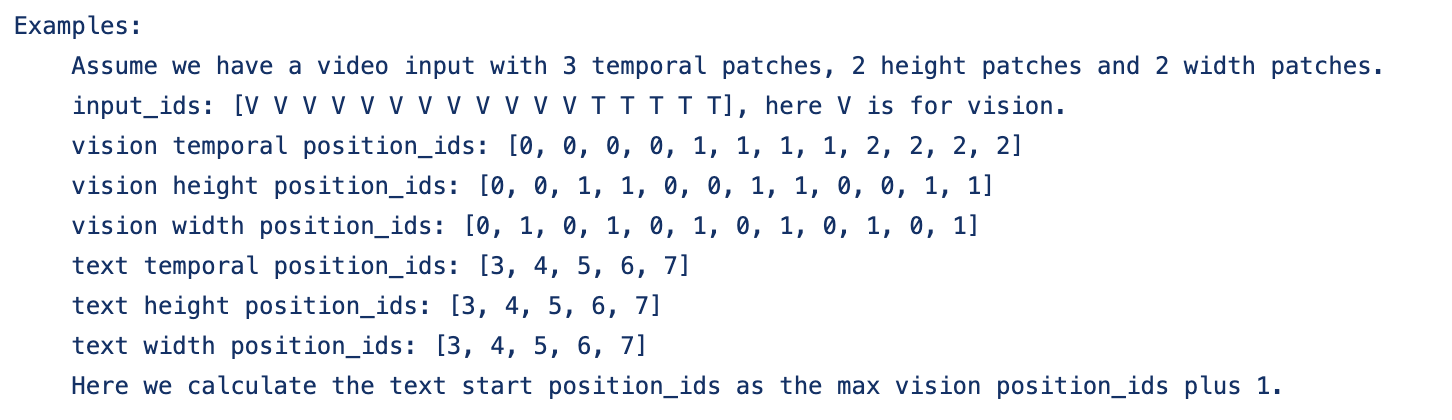
M-RoPE的源码注释
用本文的记号,M-RoPE实际上就是取了$\beta_1=\beta_2=\beta_3=L,\gamma_1=\gamma_2=\gamma_3$(对于“文本-视频”混合模态),然后视频右段的文本的第一个Token的位置,直接取视频最大的位置坐标加1。这样如果还是用自回归的方式生成视频,确实也不用提前确定帧数,但牺牲了对称性和等价性。
对称性和等价性有多重要呢?笔者不清楚答案,这需要充分实验来验证。但如果仅仅是头脑风暴的话,笔者猜测可能会影响极端情形的表现,比如对于M-RoPE来说,如果是画面很小但时间很长的视频,它的空间维度的位置坐标相对于左段文本来说是连续的,但相对于右段文本来说则是突变了,直觉上会使得文本和视觉的交互更不友好。
再比如一个$w=h=t=n$的视频,直觉上它等效于$n^3$个Token,但如果按照M-RoPE的规则,如果两段文本夹着这样一个视频,只是等价于夹着一个$n$个Token的文本,换言之在大小为$n$的相对距离内放下了$n^3$个Token,会不会导致信息密度过大而增加模型理解难度了?
当然,对于NoPE都可能Work的Decoder-only LLM来说,这些问题也可能是笔者多虑了。
文章小结 #
本文分享了笔者关于多模态位置编码的后续思考,提出了构建多模态位置编码的三个原则:兼容性、等价性和对称性,改进了之前提出过的RoPE-Tie,最后讨论了“文本-视频”混合模态的位置编码设计和困难,以及Qwen2-VL的M-RoPE与RoPE-Tie的联系等。
转载到请包括本文地址:https://spaces.ac.cn/archives/10352
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Sep. 06, 2024). 《“闭门造车”之多模态思路浅谈(三):位置编码 》[Blog post]. Retrieved from https://spaces.ac.cn/archives/10352
@online{kexuefm-10352,
title={“闭门造车”之多模态思路浅谈(三):位置编码},
author={苏剑林},
year={2024},
month={Sep},
url={\url{https://spaces.ac.cn/archives/10352}},
}

March 28th, 2025
[...]TMRoPE 我们提出了一种 音视频时间交错算法(time-interleaving),并引入了新的 位置编码方法 —— TMRoPE(Time-aligned Multimodal RoPE)。如 图 3 所示,TMRoPE 编码了多模态输入的三维位置,采用 多模态旋转位置编码(M-RoPE)【ps: Qwen2-VL多模态旋转位置编码 多模位置编码】,并结合绝对时间位置。具体方法是将原始的旋[...]
June 11th, 2025
Rope-Tie-v2的那个图 右侧是数学计算写错了 还得加上一个L 才是11.5
更正过来了,谢谢。
November 4th, 2025
an image is worth of 16x16 words (tokens), 但是一个patch的image token跟一个文字的token的信息量本身一定是不同的。所以等价性是不是一定要追求的呢?好似不一定,不知道我这样想对不对
这里的等价性只是一个具体例子,如果你认为一个image token等价于0.5个text token,也可以构造另一种等价性形式。但等价性本身,感觉还是要满足比较舒服。