






18
Jan
多任务学习漫谈(一):以损失之名
By 苏剑林 | 2022-01-18 | 154833位读者 | 引用能提升模型性能的方法有很多,多任务学习(Multi-Task Learning)也是其中一种。简单来说,多任务学习是希望将多个相关的任务共同训练,希望不同任务之间能够相互补充和促进,从而获得单任务上更好的效果(准确率、鲁棒性等)。然而,多任务学习并不是所有任务堆起来就能生效那么简单,如何平衡每个任务的训练,使得各个任务都尽量获得有益的提升,依然是值得研究的课题。
最近,笔者机缘巧合之下,也进行了一些多任务学习的尝试,借机也学习了相关内容,在此挑部分结果与大家交流和讨论。
加权求和
从损失函数的层面看,多任务学习就是有多个损失函数$\mathcal{L}_1,\mathcal{L}_2,\cdots,\mathcal{L}_n$,一般情况下它们有大量的共享参数、少量的独立参数,而我们的目标是让每个损失函数都尽可能地小。为此,我们引入权重$\alpha_1,\alpha_2,\cdots,\alpha_n\geq 0$,通过加权求和的方式将它转化为如下损失函数的单任务学习
\begin{equation}\mathcal{L} = \sum_{i=1}^n \alpha_i \mathcal{L}_i\label{eq:w-loss}\end{equation}
在这个视角下,多任务学习的主要难点就是如何确定各个$\alpha_i$了。
21
Feb
GPLinker:基于GlobalPointer的事件联合抽取
By 苏剑林 | 2022-02-21 | 77990位读者 | 引用大约两年前,笔者在百度的“2020语言与智能技术竞赛”中首次接触到了事件抽取任务,并在文章《bert4keras在手,baseline我有:百度LIC2020》中分享了一个转化为BERT+CRF做NER的简单baseline。不过,当时的baseline更像是一个用来凑数的半成品,算不上一个完整的事件抽取模型。而这两年来,关系抽取的模型层见迭出,SOTA一个接一个,但事件抽取似乎没有多亮眼的设计。
最近笔者重新尝试了事件抽取任务,在之前的关系抽取模型GPLinker的基础上,结合完全子图搜索,设计一个比较简单但相对完备的事件联合抽取模型,依然称之为GPLinker,在此请大家点评一番。
任务简介
事件抽取是一个比较综合的任务。一个标准的事件抽取样本如下:
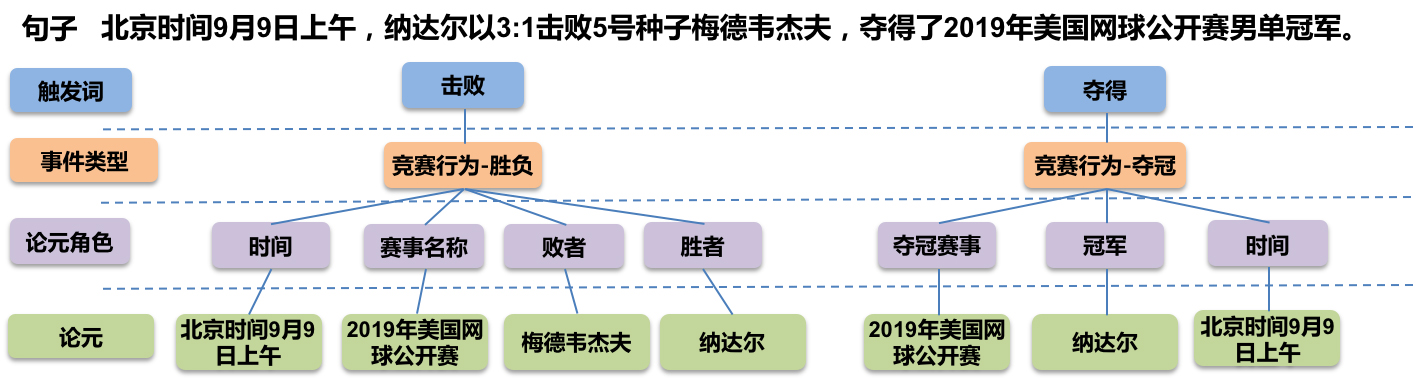
标准的事件抽取样本(图片来自百度DuEE的GitHub)
29
Mar
为什么Pre Norm的效果不如Post Norm?
By 苏剑林 | 2022-03-29 | 98234位读者 | 引用Pre Norm与Post Norm之间的对比是一个“老生常谈”的话题了,本博客就多次讨论过这个问题,比如文章《浅谈Transformer的初始化、参数化与标准化》、《模型优化漫谈:BERT的初始标准差为什么是0.02?》等。目前比较明确的结论是:同一设置之下,Pre Norm结构往往更容易训练,但最终效果通常不如Post Norm。Pre Norm更容易训练好理解,因为它的恒等路径更突出,但为什么它效果反而没那么好呢?
笔者之前也一直没有好的答案,直到前些时间在知乎上看到 @唐翔昊 的一个回复后才“恍然大悟”,原来这个问题竟然有一个非常直观的理解!本文让我们一起来学习一下。
1
Jun
如何训练你的准确率?
By 苏剑林 | 2022-06-01 | 27561位读者 | 引用最近Arxiv上的一篇论文《EXACT: How to Train Your Accuracy》引起了笔者的兴趣,顾名思义这是介绍如何直接以准确率为训练目标来训练模型的。正好笔者之前也对此有过一些分析,如《函数光滑化杂谈:不可导函数的可导逼近》、《再谈类别不平衡问题:调节权重与魔改Loss的对比联系》等, 所以带着之前的研究经验很快完成了论文的阅读,写下了这篇总结,并附上了最近关于这个主题的一些新思考。
失实的例子
论文开头指出,我们平时用的分类损失函数是交叉熵或者像SVM中的Hinge Loss,这两个损失均不能很好地拟合最终的评价指标准确率。为了说明这一点,论文举了一个很简单的例子:假设数据只有$\{(-0.25,-1),(0,-1),(0.25,,1)\}$三个点,$-1$和$1$分别代表负类和正类,待拟合模型是$f(x)=x-b$,$b$是参数,我们希望通过$\text{sign}(f(x))$来预测类别。如果用“sigmoid + 交叉熵”,那么损失函数就是$-\log \frac{1}{1+e^{-l \cdot f(x)}}$,$(x,l)$代表一对标签数据;如果用Hinge Loss,则是$\max(0, 1 - l\cdot f(x))$。
15
Jul
不成功的尝试:将多标签交叉熵推广到“n个m分类”上去
By 苏剑林 | 2022-07-15 | 24717位读者 | 引用可能有读者留意到,这次更新相对来说隔得比较久了。事实上,在上周末时就开始准备这篇文章了,然而笔者低估了这个问题的难度,几乎推导了整整一周,仍然还没得到一个完善的结果出来。目前发出来的,仍然只是一个失败的结果,希望有经验的读者可以指点指点。
在文章《将“Softmax+交叉熵”推广到多标签分类问题》中,我们提出了一个多标签分类损失函数,它能自动调节正负类的不平衡问题,后来在《多标签“Softmax+交叉熵”的软标签版本》中我们还进一步得到了它的“软标签”版本。本质上来说,多标签分类就是“$n$个2分类”问题,那么相应的,“$n$个$m$分类”的损失函数又该是怎样的呢?
这就是本文所要探讨的问题。
12
Aug
生成扩散模型漫谈(七):最优扩散方差估计(上)
By 苏剑林 | 2022-08-12 | 77803位读者 | 引用对于生成扩散模型来说,一个很关键的问题是生成过程的方差应该怎么选择,因为不同的方差会明显影响生成效果。
在《生成扩散模型漫谈(二):DDPM = 自回归式VAE》我们提到,DDPM分别假设数据服从两种特殊分布推出了两个可用的结果;《生成扩散模型漫谈(四):DDIM = 高观点DDPM》中的DDIM则调整了生成过程,将方差变为超参数,甚至允许零方差生成,但方差为0的DDIM的生成效果普遍差于方差非0的DDPM;而《生成扩散模型漫谈(五):一般框架之SDE篇》显示前、反向SDE的方差应该是一致的,但这原则上在$\Delta t\to 0$时才成立;《Improved Denoising Diffusion Probabilistic Models》则提出将它视为可训练参数来学习,但会增加训练难度。
所以,生成过程的方差究竟该怎么设置呢?今年的两篇论文《Analytic-DPM: an Analytic Estimate of the Optimal Reverse Variance in Diffusion Probabilistic Models》和《Estimating the Optimal Covariance with Imperfect Mean in Diffusion Probabilistic Models》算是给这个问题提供了比较完美的答案。接下来我们一起欣赏一下它们的结果。
21
Sep
生成扩散模型漫谈(十一):统一扩散模型(应用篇)
By 苏剑林 | 2022-09-21 | 45229位读者 | 引用在《生成扩散模型漫谈(十):统一扩散模型(理论篇)》中,笔者自称构建了一个统一的模型框架(Unified Diffusion Model,UDM),它允许更一般的扩散方式和数据类型。那么UDM框架究竟能否实现如期目的呢?本文通过一些具体例子来演示其一般性。
框架回顾
首先,UDM通过选择噪声分布$q(\boldsymbol{\varepsilon})$和变换$\boldsymbol{\mathcal{F}}$来构建前向过程
\begin{equation}\boldsymbol{x}_t = \boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon}),\quad \boldsymbol{\varepsilon}\sim q(\boldsymbol{\varepsilon})\end{equation}
然后,通过如下的分解来实现反向过程$\boldsymbol{x}_{t-1}\sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t)$的采样
\begin{equation}\hat{\boldsymbol{x}}_0\sim p(\boldsymbol{x}_0|\boldsymbol{x}_t)\quad \& \quad \boldsymbol{x}_{t-1}\sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0=\hat{\boldsymbol{x}}_0)\end{equation}
其中$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$就是用$\boldsymbol{x}_t$预估$\boldsymbol{x}_0$的概率,一般用简单分布$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$来近似建模,训练目标基本上就是$-\log q(\boldsymbol{x}_0|\boldsymbol{x}_t)$或其简单变体。当$\boldsymbol{x}_0$是连续型数据时,$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$一般就取条件正态分布;当$\boldsymbol{x}_0$是离散型数据时,$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$可以选择自回归模型或者非自回归模型。
12
Jan
Transformer升级之路:7、长度外推性与局部注意力
By 苏剑林 | 2023-01-12 | 91260位读者 | 引用对于Transformer模型来说,其长度的外推性是我们一直在追求的良好性质,它是指我们在短序列上训练的模型,能否不用微调地用到长序列上并依然保持不错的效果。之所以追求长度外推性,一方面是理论的完备性,觉得这是一个理想模型应当具备的性质,另一方面也是训练的实用性,允许我们以较低成本(在较短序列上)训练出一个长序列可用的模型。
下面我们来分析一下加强Transformer长度外推性的关键思路,并由此给出一个“超强基线”方案,然后我们带着这个“超强基线”来分析一些相关的研究工作。
思维误区
第一篇明确研究Transformer长度外推性的工作应该是ALIBI,出自2021年中期,距今也不算太久。为什么这么晚(相比Transformer首次发表的2017年)才有人专门做这个课题呢?估计是因为我们长期以来,都想当然地认为Transformer的长度外推性是位置编码的问题,找到更好的位置编码就行了。

最近评论