






10
Jun
无监督分词和句法分析!原来BERT还可以这样用
By 苏剑林 | 2020-06-10 | 97022位读者 | 引用BERT的一般用法就是加载其预训练权重,再接一小部分新层,然后在下游任务上进行finetune,换句话说一般的用法都是有监督训练的。基于这个流程,我们可以做中文的分词、NER甚至句法分析,这些想必大家就算没做过也会有所听闻。但如果说直接从预训练的BERT(不finetune)就可以对句子进行分词,甚至析出其句法结构出来,那应该会让人感觉到意外和有趣了。
本文介绍ACL 2020的论文《Perturbed Masking: Parameter-free Probing for Analyzing and Interpreting BERT》,里边提供了直接利用Masked Language Model(MLM)来分析和解释BERT的思路,而利用这种思路,我们可以无监督地做到分词甚至句法分析。
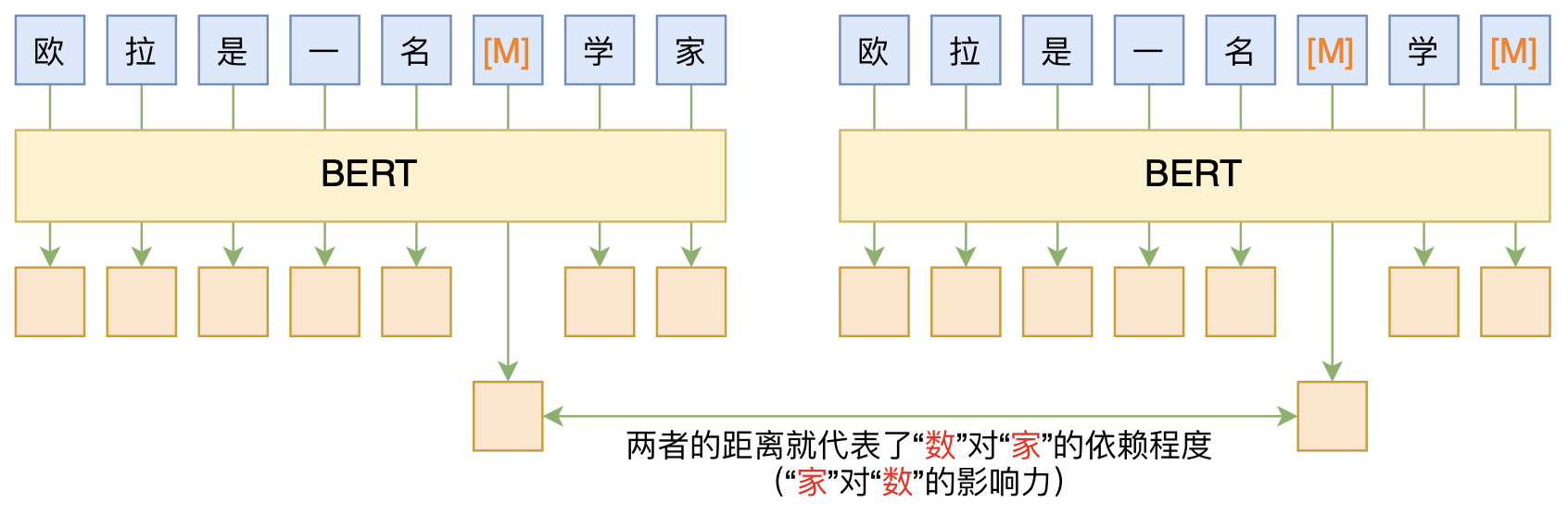
基于BERT的“token-token”相关度计算图示

18
Jul
也来扯几句“全国青少年科技创新大赛”
By 苏剑林 | 2020-07-18 | 40457位读者 | 引用后台提示,本文是科学空间的第1000篇文章。
本想写下一篇文章的,但是看到这个提示,就先瞎写个水文纪念一下。都说人老了就喜欢各种感叹,这话还真不假。看到别人高考来个感想,博客十周年了来个感想,现在第1000篇文章了也来个感想,似乎总想找点理由感叹一下一样。那今天又能扯些啥犊子呢?

1000
首先,自恋一下。1000篇文章,如果要印刷下来,就算每篇文章印一页,那也能印个1000页了,相信不少人都没捧起过1000页的书吧(我还真读过,有文章为证:《哈哈,我的“〈圣经〉”到了》),我居然能写个1000篇,也是挺佩服自己的。当然,早期的文章有部分是转载的,不是全部都自己写的,不过还是坚持了不少原创内容,而且就算是转载的也是经过自己编辑整理的,不算纯Copy,所以也勉强能说的过去吧。
然后,庆幸一下。博客开始的主题是天文和科普,后来慢慢偏向了理论物理和数学,现在则偏向了机器学习,但不管怎样,总算很庆幸地在科学这条路坚持了下来。虽然没有像幼时设想的那样成为一名真正的自然科学家/数学家,但终究有点相关,闲时依然可以做做科学计算,勉强也对得起当初的梦想。
4
Dec
层次分解位置编码,让BERT可以处理超长文本
By 苏剑林 | 2020-12-04 | 145263位读者 | 引用大家都知道,目前的主流的BERT模型最多能处理512个token的文本。导致这一瓶颈的根本原因是BERT使用了从随机初始化训练出来的绝对位置编码,一般的最大位置设为了512,因此顶多只能处理512个token,多出来的部分就没有位置编码可用了。当然,还有一个重要的原因是Attention的O(n2)复杂度,导致长序列时显存用量大大增加,一般显卡也finetune不了。
位置编码的层次分解示意图
本文主要面向前一个原因,即假设有足够多的显存前提下,如何简单修改当前最大长度为512的BERT模型,使得它可以直接处理更长的文本,主要思路是层次分解已经训练好的绝对位置编码,使得它可以延拓到更长的位置。
14
Dec
Mitchell近似:乘法变为加法,误差不超过1/9
By 苏剑林 | 2020-12-14 | 46869位读者 | 引用今天给大家介绍一篇1962年的论文《Computer Multiplication and Division Using Binary Logarithms》,作者是John N. Mitchell,他在里边提出了一个相当有意思的算法:在二进制下,可以完全通过加法来近似完成两个数的相乘,最大误差不超过1/9。整个算法相当巧妙,更有意思的是它还有着非常简洁的编程实现,让人拍案叫绝。然而,笔者发现网上居然找不到介绍这个算法的网页,所以在此介绍一番。
你以为这只是过时的玩意?那你就错了,前不久才有人利用它发了一篇NeurIPS 2020呢!所以,确定不来了解一下吗?
3
Mar
T5 PEGASUS:开源一个中文生成式预训练模型
By 苏剑林 | 2021-03-03 | 223564位读者 | 引用去年在文章《那个屠榜的T5模型,现在可以在中文上玩玩了》中我们介绍了Google的多国语言版T5模型(mT5),并给出了用mT5进行中文文本生成任务的例子。诚然,mT5做中文生成任务也是一个可用的方案,但缺乏完全由中文语料训练出来模型总感觉有点别扭,于是决心要搞一个出来。
经过反复斟酌测试,我们决定以mT5为基础架构和初始权重,先结合中文的特点完善Tokenizer,然后模仿PEGASUS来构建预训练任务,从而训练一版新的T5模型,这就是本文所开源的T5 PEGASUS。
T5 PEGASUS的训练数据示例
3
Apr
P-tuning:自动构建模版,释放语言模型潜能
By 苏剑林 | 2021-04-03 | 177909位读者 | 引用在之前的文章《必须要GPT3吗?不,BERT的MLM模型也能小样本学习》中,我们介绍了一种名为Pattern-Exploiting Training(PET)的方法,它通过人工构建的模版与BERT的MLM模型结合,能够起到非常好的零样本、小样本乃至半监督学习效果,而且该思路比较优雅漂亮,因为它将预训练任务和下游任务统一起来了。然而,人工构建这样的模版有时候也是比较困难的,而且不同的模版效果差别也很大,如果能够通过少量样本来自动构建模版,也是非常有价值的。
![P-tuning直接使用[unused]来构建模版,不关心模版的自然语言性](/usr/uploads/2021/04/2868831073.png)
P-tuning直接使用[unused]来构建模版,不关心模版的自然语言性
最近Arxiv上的论文《GPT Understands, Too》提出了名为P-tuning的方法,成功地实现了模版的自动构建。不仅如此,借助P-tuning,GPT在SuperGLUE上的成绩首次超过了同等级别的BERT模型,这颠覆了一直以来“GPT不擅长NLU”的结论,也是该论文命名的缘由。

最近评论