






30
Aug
生成扩散模型漫谈(九):条件控制生成结果
By 苏剑林 | 2022-08-30 | 134094位读者 | 引用前面的几篇文章都是比较偏理论的结果,这篇文章我们来讨论一个比较有实用价值的主题——条件控制生成。
作为生成模型,扩散模型跟VAE、GAN、flow等模型的发展史很相似,都是先出来了无条件生成,然后有条件生成就紧接而来。无条件生成往往是为了探索效果上限,而有条件生成则更多是应用层面的内容,因为它可以实现根据我们的意愿来控制输出结果。从DDPM至今,已经出来了很多条件扩散模型的工作,甚至可以说真正带火了扩散模型的就是条件扩散模型,比如脍炙人口的文生图模型DALL·E 2、Imagen。
在这篇文章中,我们对条件扩散模型的理论基础做个简单的学习和总结。
技术分析
从方法上来看,条件控制生成的方式分两种:事后修改(Classifier-Guidance)和事前训练(Classifier-Free)。
14
Sep
生成扩散模型漫谈(十):统一扩散模型(理论篇)
By 苏剑林 | 2022-09-14 | 69260位读者 | 引用老读者也许会发现,相比之前的更新频率,这篇文章可谓是“姗姗来迟”,因为这篇文章“想得太多”了。
通过前面九篇文章,我们已经对生成扩散模型做了一个相对全面的介绍。虽然理论内容很多,但我们可以发现,前面介绍的扩散模型处理的都是连续型对象,并且都是基于正态噪声来构建前向过程。而“想得太多”的本文,则希望能够构建一个能突破以上限制的扩散模型统一框架(Unified Diffusion Model,UDM):
1、不限对象类型(可以是连续型$\boldsymbol{x}$,也可以是离散型的$\boldsymbol{x}$);
2、不限前向过程(可以用加噪、模糊、遮掩、删减等各种变换构建前向过程);
3、不限时间类型(可以是离散型的$t$,也可以是连续型的$t$);
4、包含已有结果(可以推出前面的DDPM、DDIM、SDE、ODE等结果)。
这是不是太过“异想天开”了?有没有那么理想的框架?本文就来尝试一下。
9
Nov
CoSENT(三):作为交互式相似度的损失函数
By 苏剑林 | 2022-11-09 | 30690位读者 | 引用在《CoSENT(一):比Sentence-BERT更有效的句向量方案》中,笔者提出了名为“CoSENT”的有监督句向量方案,由于它是直接训练cos相似度的,跟评测目标更相关,因此通常能有着比Sentence-BERT更好的效果以及更快的收敛速度。在《CoSENT(二):特征式匹配与交互式匹配有多大差距?》中我们还比较过它跟交互式相似度模型的差异,显示它在某些任务上的效果还能直逼交互式相似度模型。
然而,当时笔者是一心想找一个更接近评测目标的Sentence-BERT替代品,所以结果都是面向有监督句向量的,即特征式相似度模型。最近笔者突然反应过来,CoSENT其实也能作为交互式相似度模型的损失函数。那么它跟标准选择交叉熵相比孰优孰劣呢?本文来补充这部分实验。
21
Sep
生成扩散模型漫谈(十一):统一扩散模型(应用篇)
By 苏剑林 | 2022-09-21 | 42620位读者 | 引用在《生成扩散模型漫谈(十):统一扩散模型(理论篇)》中,笔者自称构建了一个统一的模型框架(Unified Diffusion Model,UDM),它允许更一般的扩散方式和数据类型。那么UDM框架究竟能否实现如期目的呢?本文通过一些具体例子来演示其一般性。
框架回顾
首先,UDM通过选择噪声分布$q(\boldsymbol{\varepsilon})$和变换$\boldsymbol{\mathcal{F}}$来构建前向过程
\begin{equation}\boldsymbol{x}_t = \boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon}),\quad \boldsymbol{\varepsilon}\sim q(\boldsymbol{\varepsilon})\end{equation}
然后,通过如下的分解来实现反向过程$\boldsymbol{x}_{t-1}\sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t)$的采样
\begin{equation}\hat{\boldsymbol{x}}_0\sim p(\boldsymbol{x}_0|\boldsymbol{x}_t)\quad \& \quad \boldsymbol{x}_{t-1}\sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0=\hat{\boldsymbol{x}}_0)\end{equation}
其中$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$就是用$\boldsymbol{x}_t$预估$\boldsymbol{x}_0$的概率,一般用简单分布$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$来近似建模,训练目标基本上就是$-\log q(\boldsymbol{x}_0|\boldsymbol{x}_t)$或其简单变体。当$\boldsymbol{x}_0$是连续型数据时,$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$一般就取条件正态分布;当$\boldsymbol{x}_0$是离散型数据时,$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$可以选择自回归模型或者非自回归模型。
4
Jan
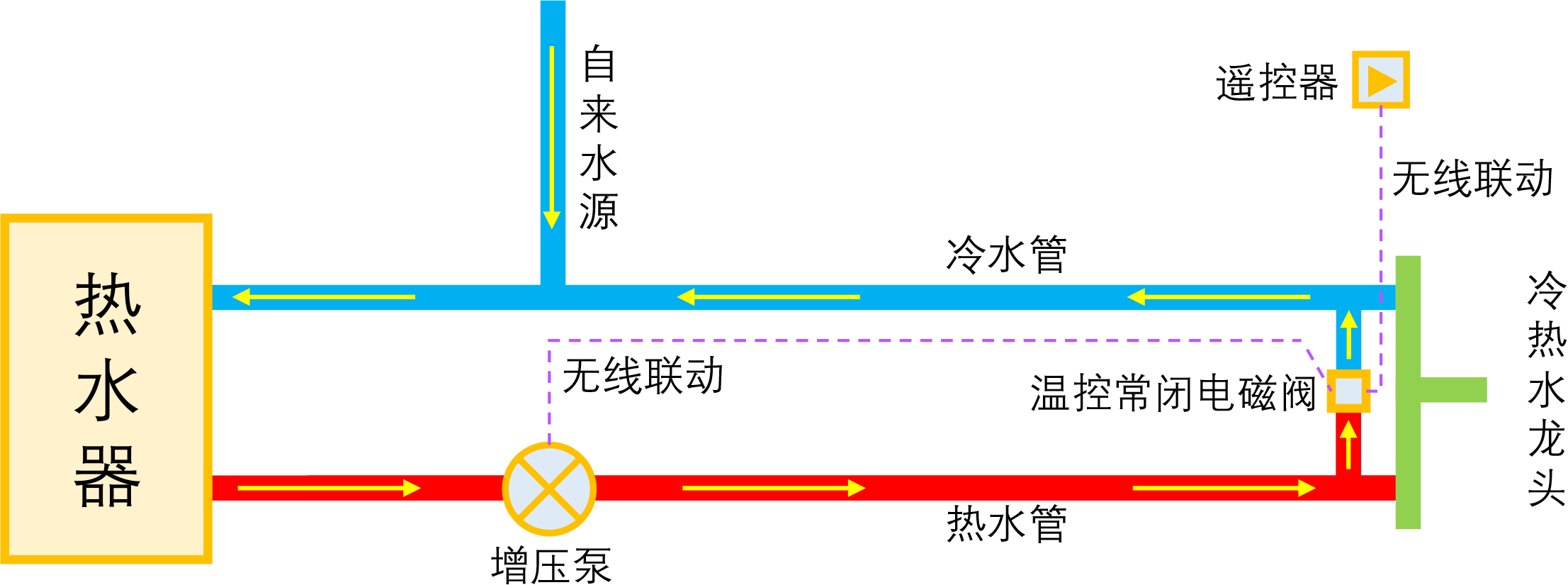
智能家居之热水器零冷水技术原理浅析
By 苏剑林 | 2023-01-04 | 42448位读者 | 引用如果家庭使用单一的热水器集中供热水,那么当我们想要用热水时,往往需要先放一段时间的冷水,而如果放冷水时间比较长的话,就会比较影响体验。所谓零冷水,实际上就是想办法提前把热水管中的冷水排放掉,以达到(几乎)瞬间出热水的效果。事实上,零冷水并不是什么高大上的技术,但可能由于观念没跟上、理解上有误等原因,零冷水技术还没有在家庭中得到普及,不过随着大家对生活品质的要求越来越高,零冷水确实在慢慢流行起来了。
本文来简单分析一下零冷水技术的实现原理,包括各种方案的优缺点和自省DIY的参考思路。
理想的零冷水方案
写在前面
在文章开始,需要纠正很多人的一个错误观念:零冷水不是为了省钱,而是为了提升生活品质。如果你是省钱最大的心态,那么接下来的内容就可以不用看了,零冷水技术对你毫无价值。
25
Apr
注意力和Softmax的两点有趣发现:鲁棒性和信息量
By 苏剑林 | 2023-04-25 | 29258位读者 | 引用最近几周笔者一直都在思考注意力机制的相关性质,在这个过程中对注意力及Softmax有了更深刻的理解。在这篇文章中,笔者简单分享其中的两点:
1、Softmax注意力天然能够抵御一定的噪声扰动;
2、从信息熵角度也可以对初始化问题形成直观理解。
鲁棒性
基于Softmax归一化的注意力机制,可以写为
\begin{equation}o = \frac{\sum\limits_{i=1}^n e^{s_i} v_i}{\sum\limits_{i=1}^n e^{s_i}}\end{equation}
有一天笔者突然想到一个问题:如果往$s_i$中加入独立同分布的噪声会怎样?
17
Apr
梯度视角下的LoRA:简介、分析、猜测及推广
By 苏剑林 | 2023-04-17 | 70495位读者 | 引用随着ChatGPT及其平替的火热,各种参数高效(Parameter-Efficient)的微调方法也“水涨船高”,其中最流行的方案之一就是本文的主角LoRA了,它出自论文《LoRA: Low-Rank Adaptation of Large Language Models》。LoRA方法上比较简单直接,而且也有不少现成实现,不管是理解还是使用都很容易上手,所以本身也没太多值得细写的地方了。
然而,直接实现LoRA需要修改网络结构,这略微麻烦了些,同时LoRA给笔者的感觉是很像之前的优化器AdaFactor,所以笔者的问题是:能否从优化器角度来分析和实现LoRA呢?本文就围绕此主题展开讨论。
方法简介
以往的一些结果(比如《Exploring Aniversal Intrinsic Task Subspace via Prompt Tuning》)显示,尽管预训练模型的参数量很大,但每个下游任务对应的本征维度(Intrinsic Dimension)并不大,换句话说,理论上我们可以微调非常小的参数量,就能在下游任务取得不错的效果。
LoRA借鉴了上述结果,提出对于预训练的参数矩阵$W_0\in\mathbb{R}^{n\times m}$,我们不去直接微调$W_0$,而是对增量做低秩分解假设:
\begin{equation}W = W_0 + A B,\qquad A\in\mathbb{R}^{n\times r},B\in\mathbb{R}^{r\times m}\end{equation}
8
Jun
Naive Bayes is all you need ?
By 苏剑林 | 2023-06-08 | 43905位读者 | 引用很抱歉,起了这么个具有标题党特征的题目。在写完《NBCE:使用朴素贝叶斯扩展LLM的Context处理长度》之后,笔者就觉得朴素贝叶斯(Naive Bayes)跟Attention机制有很多相同的特征,后来再推导了一下发现,Attention机制其实可以看成是一种广义的、参数化的朴素贝叶斯。既然如此,“Attention is All You Need”不也就意味着“Naive Bayes is all you need”了?这就是本文标题的缘由。
接下来笔者将介绍自己的思考过程,分析如何从朴素贝叶斯角度来理解Attention机制。
朴素贝叶斯
本文主要考虑语言模型,它要建模的是$p(x_t|x_1,\cdots,x_{t-1})$。根据贝叶斯公式,我们有
\begin{equation}p(x_t|x_1,\cdots,x_{t-1}) = \frac{p(x_1,\cdots,x_{t-1}|x_t)p(x_t)}{p(x_1,\cdots,x_{t-1})}\propto p(x_1,\cdots,x_{t-1}|x_t)p(x_t)\end{equation}

最近评论