






20
Dec
从动力学角度看优化算法(二):自适应学习率算法
By 苏剑林 | 2018-12-20 | 42507位读者 | 引用在《从动力学角度看优化算法(一):从SGD到动量加速》一文中,我们提出SGD优化算法跟常微分方程(ODE)的数值解法其实是对应的,由此还可以很自然地分析SGD算法的收敛性质、动量加速的原理等等内容。
在这篇文章中,我们继续沿着这个思路,去理解优化算法中的自适应学习率算法。
RMSprop
首先,我们看一个非常经典的自适应学习率优化算法:RMSprop。RMSprop虽然不是最早提出的自适应学习率的优化算法,但是它却是相当实用的一种,它是诸如Adam这样的更综合的算法的基石,通过它我们可以观察自适应学习率的优化算法是怎么做的。
算法概览
一般的梯度下降是这样的:
$$\begin{equation}\boldsymbol{\theta}_{n+1}=\boldsymbol{\theta}_{n} - \gamma \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_{n})\end{equation}$$
很明显,这里的$\gamma$是一个超参数,便是学习率,它可能需要在不同阶段做不同的调整。
而RMSprop则是
$$\begin{equation}\begin{aligned}\boldsymbol{g}_{n+1} =& \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_{n})\\
\boldsymbol{G}_{n+1}=&\lambda \boldsymbol{G}_{n} + (1 - \lambda) \boldsymbol{g}_{n+1}\otimes \boldsymbol{g}_{n+1}\\
\boldsymbol{\theta}_{n+1}=&\boldsymbol{\theta}_{n} - \frac{\tilde{\gamma}}{\sqrt{\boldsymbol{G}_{n+1} + \epsilon}}\otimes \boldsymbol{g}_{n+1}
\end{aligned}\end{equation}$$
3
May
从动力学角度看优化算法(四):GAN的第三个阶段
By 苏剑林 | 2019-05-03 | 83646位读者 | 引用在对GAN的学习和思考过程中,我发现我不仅学习到了一种有效的生成模型,而且它全面地促进了我对各种模型各方面的理解,比如模型的优化和理解视角、正则项的意义、损失函数与概率分布的联系、概率推断等等。GAN不单单是一个“造假的玩具”,而是具有深刻意义的概率模型和推断方法。
作为事后的总结,我觉得对GAN的理解可以粗糙地分为三个阶段:
1、样本阶段:在这个阶段中,我们了解了GAN的“鉴别者-造假者”诠释,懂得从这个原理出发来写出基本的GAN公式(如原始GAN、LSGAN),比如判别器和生成器的loss,并且完成简单GAN的训练;同时,我们知道GAN有能力让图片更“真”,利用这个特性可以把GAN嵌入到一些综合模型中。
2、分布阶段:在这个阶段中,我们会从概率分布及其散度的视角来分析GAN,典型的例子是WGAN和f-GAN,同时能基本理解GAN的训练困难问题,比如梯度消失和mode collapse等,甚至能基本地了解变分推断,懂得自己写出一些概率散度,继而构造一些新的GAN形式。
3、动力学阶段:在这个阶段中,我们开始结合优化器来分析GAN的收敛过程,试图了解GAN是否能真的达到理论的均衡点,进而理解GAN的loss和正则项等因素如何影响的收敛过程,由此可以针对性地提出一些训练策略,引导GAN模型到达理论均衡点,从而提高GAN的效果。
10
Oct
从动力学角度看优化算法(五):为什么学习率不宜过小?
By 苏剑林 | 2020-10-10 | 45663位读者 | 引用本文的主题是“为什么我们需要有限的学习率”,所谓“有限”,指的是不大也不小,适中即可,太大容易导致算法发散,这不难理解,但为什么太小也不好呢?一个容易理解的答案是,学习率过小需要迭代的步数过多,这是一种没有必要的浪费,因此从“节能”和“加速”的角度来看,我们不用过小的学习率。但如果不考虑算力和时间,那么过小的学习率是否可取呢?Google最近发布在Arxiv上的论文《Implicit Gradient Regularization》试图回答了这个问题,它指出有限的学习率隐式地给优化过程带来了梯度惩罚项,而这个梯度惩罚项对于提高泛化性能是有帮助的,因此哪怕不考虑算力和时间等因素,也不应该用过小的学习率。
对于梯度惩罚,本博客已有过多次讨论,在文章《对抗训练浅谈:意义、方法和思考(附Keras实现)》和《泛化性乱弹:从随机噪声、梯度惩罚到虚拟对抗训练》中,我们就分析了对抗训练一定程度上等价于对输入的梯度惩罚,而文章《我们真的需要把训练集的损失降低到零吗?》介绍的Flooding技巧则相当于对参数的梯度惩罚。总的来说,不管是对输入还是对参数的梯度惩罚,都对提高泛化能力有一定帮助。
21
Dec
从动力学角度看优化算法(七):SGD ≈ SVM?
By 苏剑林 | 2020-12-21 | 31110位读者 | 引用众所周知,在深度学习之前,机器学习是SVM(Support Vector Machine,支持向量机)的天下,曾经的它可谓红遍机器学习的大江南北,迷倒万千研究人员,直至今日,“手撕SVM”仍然是大厂流行的面试题之一。然而,时过境迁,当深度学习流行起来之后,第一个革的就是SVM的命,现在只有在某些特别追求效率的场景以及大厂的面试题里边,才能看到SVM的踪迹了。
峰回路转的是,最近Arxiv上的一篇论文《Every Model Learned by Gradient Descent Is Approximately a Kernel Machine》做了一个非常“霸气”的宣言:
任何由梯度下降算法学出来的模型,都是可以近似看成是一个SVM!
这结论真不可谓不“霸气”,因为它已经不只是针对深度学习了,而是只要你用梯度下降优化的,都不过是一个SVM(的近似)。笔者看了一下原论文的分析,感觉确实挺有意思也挺合理的,有助于加深我们对很多模型的理解,遂跟大家分享一下。
27
Jun
从动力学角度看优化算法(一):从SGD到动量加速
By 苏剑林 | 2018-06-27 | 140704位读者 | 引用在这个系列中,我们来关心优化算法,而本文的主题则是SGD(stochastic gradient descent,随机梯度下降),包括带Momentum和Nesterov版本的。对于SGD,我们通常会关心的几个问题是:
SGD为什么有效?
SGD的batch size是不是越大越好?
SGD的学习率怎么调?
Momentum是怎么加速的?
Nesterov为什么又比Momentum稍好?
...
这里试图从动力学角度分析SGD,给出上述问题的一些启发性理解。
梯度下降
既然要比较谁好谁差,就需要知道最好是什么样的,也就是说我们的终极目标是什么?
训练目标分析
假设全部训练样本的集合为$\boldsymbol{S}$,损失度量为$L(\boldsymbol{x};\boldsymbol{\theta})$,其中$\boldsymbol{x}$代表单个样本,而$\boldsymbol{\theta}$则是优化参数,那么我们可以构建损失函数
$$L(\boldsymbol{\theta}) = \frac{1}{|\boldsymbol{S}|}\sum_{\boldsymbol{x}\in\boldsymbol{S}} L(\boldsymbol{x};\boldsymbol{\theta})\tag{1}$$
而训练的终极目标,则是找到$L(\boldsymbol{\theta})$的一个全局最优点(这里的最优是“最小”的意思)。
8
Jan
从动力学角度看优化算法(三):一个更整体的视角
By 苏剑林 | 2019-01-08 | 52111位读者 | 引用
11
Dec
从动力学角度看优化算法(六):为什么SimSiam不退化?
By 苏剑林 | 2020-12-11 | 68168位读者 | 引用自SimCLR以来,CV中关于无监督特征学习的工作层出不穷,让人眼花缭乱。这些工作大多数都是基于对比学习的,即通过适当的方式构造正负样本进行分类学习的。然而,在众多类似的工作中总有一些特立独行的研究,比如Google的BYOL和最近的SimSiam,它们提出了单靠正样本就可以完成特征学习的方案,让人觉得耳目一新。但是没有负样本的支撑,模型怎么不会退化(坍缩)为一个没有意义的常数模型呢?这便是这两篇论文最值得让人思考和回味的问题了。
其中SimSiam给出了让很多人都点赞的答案,但笔者觉得SimSiam也只是把问题换了种说法,并没有真的解决这个问题。笔者认为,像SimSiam、GAN等模型的成功,很重要的原因是使用了基于梯度的优化器(而非其他更强或者更弱的优化器),所以不结合优化动力学的答案都是不完整的。在这里,笔者尝试结合动力学来分析SimSiam不会退化的原因。
SimSiam
在看SimSiam之前,我们可以先看看BYOL,来自论文《Bootstrap your own latent: A new approach to self-supervised Learning》,其学习过程很简单,就是维护两个编码器Student和Teacher,其中Teacher是Student的滑动平均,Student则又反过来向Teacher学习,有种“左脚踩右脚”就可以飞起来的感觉。示意图如下:
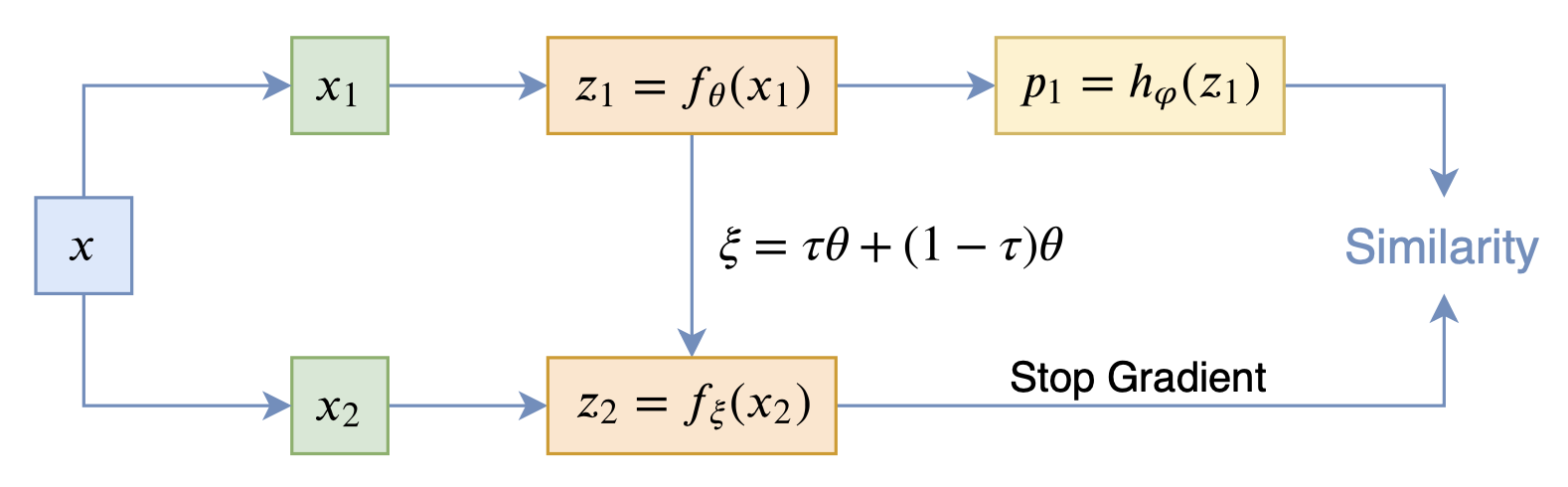
BYOL示意图
8
Sep
“让Keras更酷一些!”:小众的自定义优化器
By 苏剑林 | 2018-09-08 | 78693位读者 | 引用沿着之前的《“让Keras更酷一些!”:精巧的层与花式的回调》写下去~
今天我们来看一个小众需求:自定义优化器。
细想之下,不管用什么框架,自定义优化器这个需求可谓真的是小众中的小众。一般而言,对于大多数任务我们都可以无脑地直接上Adam,而调参炼丹高手一般会用SGD来调出更好的效果,换言之不管是高手新手,都很少会有自定义优化器的需求。
那这篇文章还有什么价值呢?有些场景下会有一点点作用。比如通过学习Keras中的优化器写法,你可以对梯度下降等算法有进一步的认识,你还可以顺带看到Keras的源码是多么简洁优雅。此外,有时候我们可以通过自定义优化器来实现自己的一些功能,比如给一些简单的模型(例如Word2Vec)重写优化器(直接写死梯度,而不是用自动求导),可以使得算法更快;自定义优化器还可以实现诸如“软batch”的功能。
Keras优化器
我们首先来看Keras中自带优化器的代码,位于:
https://github.com/keras-team/keras/blob/master/keras/optimizers.py

最近评论