






27
Oct
TeaForN:让Teacher Forcing更有“远见”一些
By 苏剑林 | 2020-10-27 | 40877位读者 | 引用Teacher Forcing是Seq2Seq模型的经典训练方式,而Exposure Bias则是Teacher Forcing的经典缺陷,这对于搞文本生成的同学来说应该是耳熟能详的事实了。笔者之前也曾写过博文《Seq2Seq中Exposure Bias现象的浅析与对策》,初步地分析过Exposure Bias问题。
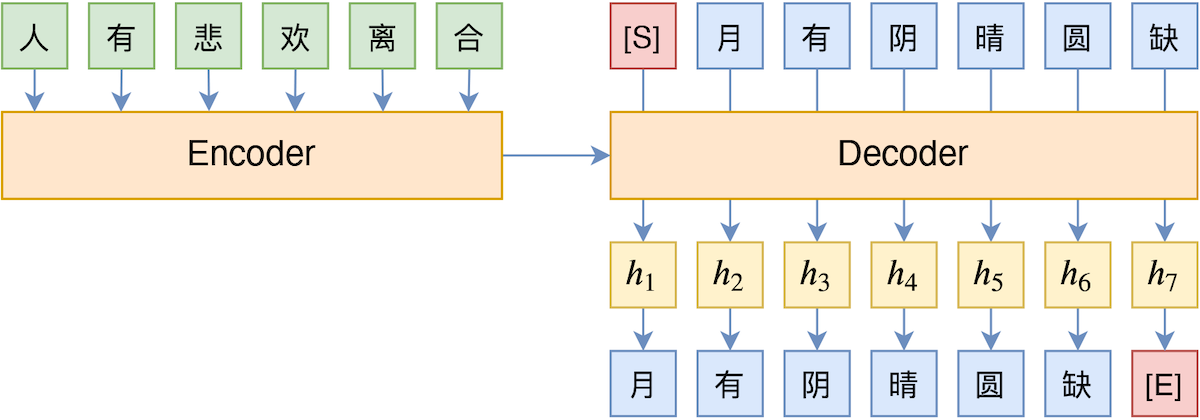
Teacher Forcing示意图
本文则介绍Google新提出的一种名为“TeaForN”的缓解Exposure Bias现象的方案,来自论文《TeaForN: Teacher-Forcing with N-grams》,它通过嵌套迭代的方式,让模型能提前预估到后$N$个token(而不仅仅是当前要预测的token),其处理思路上颇有可圈可点之处,值得我们学习。
(注:为了尽量跟本博客旧文章保持一致,本文的记号与原论文的记号有所不同,请大家以理解符号含义为主,不要强记符号形式。)
6
Nov
那个屠榜的T5模型,现在可以在中文上玩玩了
By 苏剑林 | 2020-11-06 | 131432位读者 | 引用不知道大家对Google去年的屠榜之作T5还有没有印象?就是那个打着“万事皆可Seq2Seq”的旗号、最大搞了110亿参数、一举刷新了GLUE、SuperGLUE等多个NLP榜单的模型,而且过去一年了,T5仍然是SuperGLUE榜单上的第一,目前还稳妥地拉开着第二名2%的差距。然而,对于中文界的朋友来说,T5可能没有什么存在感,原因很简单:没有中文版T5可用。不过这个现状要改变了,因为Google最近放出了多国语言版的T5(mT5),里边当然是包含了中文语言。虽然不是纯正的中文版,但也能凑合着用一下。

“万事皆可Seq2Seq”的T5
本文将会对T5模型做一个简单的回顾与介绍,然后再介绍一下如何在bert4keras中调用mT5模型来做中文任务。作为一个原生的Seq2Seq预训练模型,mT5在文本生成任务上的表现还是相当不错的,非常值得一试。
11
Nov
当GPT遇上中国象棋:写过文章解过题,要不再来下盘棋?
By 苏剑林 | 2020-11-11 | 54559位读者 | 引用
中国象棋
不知道读者有没有看过量子位年初的文章《最强写作AI竟然学会象棋和作曲,语言模型跨界操作引热议,在线求战》,里边提到有网友用GPT2模型训练了一个下国际象棋的模型。笔者一直在想,这么有趣的事情怎么可以没有中文版呢?对于国际象棋来说,其中文版自然就是中国象棋了,于是我一直有想着把它的结果在中国象棋上面复现一下。拖了大半年,在最近几天终于把这个事情完成了,在此跟大家分享一下。
象棋谱式
将军不离九宫内,士止相随不出官。
象飞四方营四角,马行一步一尖冲。
炮须隔子打一子,车行直路任西东。
唯卒只能行一步,过河横进退无踪。
4
Dec
层次分解位置编码,让BERT可以处理超长文本
By 苏剑林 | 2020-12-04 | 122729位读者 | 引用大家都知道,目前的主流的BERT模型最多能处理512个token的文本。导致这一瓶颈的根本原因是BERT使用了从随机初始化训练出来的绝对位置编码,一般的最大位置设为了512,因此顶多只能处理512个token,多出来的部分就没有位置编码可用了。当然,还有一个重要的原因是Attention的$\mathcal{O}(n^2)$复杂度,导致长序列时显存用量大大增加,一般显卡也finetune不了。
位置编码的层次分解示意图
本文主要面向前一个原因,即假设有足够多的显存前提下,如何简单修改当前最大长度为512的BERT模型,使得它可以直接处理更长的文本,主要思路是层次分解已经训练好的绝对位置编码,使得它可以延拓到更长的位置。
24
Sep
让人惊叹的Johnson-Lindenstrauss引理:应用篇
By 苏剑林 | 2021-09-24 | 36388位读者 | 引用上一篇文章中,我们比较详细地介绍了Johnson-Lindenstrauss引理(JL引理)的理论推导,这一篇我们来关注它的应用。
作为一个内容上本身就跟降维相关的结论,JL引理最基本的自然就是作为一个降维方法来用。但除了这个直接应用外,很多看似不相关的算法,比如局部敏感哈希(LSH)、随机SVD等,本质上也依赖于JL引理。此外,对于机器学习模型来说,JL引理通常还能为我们的维度选择提供一些理论解释。
降维的工具
JL引理提供了一个非常简单直接的“随机投影”降维思路:
给定$N$个向量$v_1,v_2,\cdots,v_N\in\mathbb{R}^m$,如果想要将它降到$n$维,那么只需要从$\mathcal{N}(0,1/n)$中采样一个$n\times m$矩阵$A$,然后$Av_1,Av_2,\cdots,Av_N$就是降维后的结果。
1
May
GlobalPointer:用统一的方式处理嵌套和非嵌套NER
By 苏剑林 | 2021-05-01 | 311529位读者 | 引用(注:本文的相关内容已整理成论文《Global Pointer: Novel Efficient Span-based Approach for Named Entity Recognition》,如需引用可以直接引用英文论文,谢谢。)
本文将介绍一个称为GlobalPointer的设计,它利用全局归一化的思路来进行命名实体识别(NER),可以无差别地识别嵌套实体和非嵌套实体,在非嵌套(Flat NER)的情形下它能取得媲美CRF的效果,而在嵌套(Nested NER)情形它也有不错的效果。还有,在理论上,GlobalPointer的设计思想就比CRF更合理;而在实践上,它训练的时候不需要像CRF那样递归计算分母,预测的时候也不需要动态规划,是完全并行的,理想情况下时间复杂度是$\mathcal{O}(1)$!
简单来说,就是更漂亮、更快速、更强大!真有那么好的设计吗?不妨继续看看。
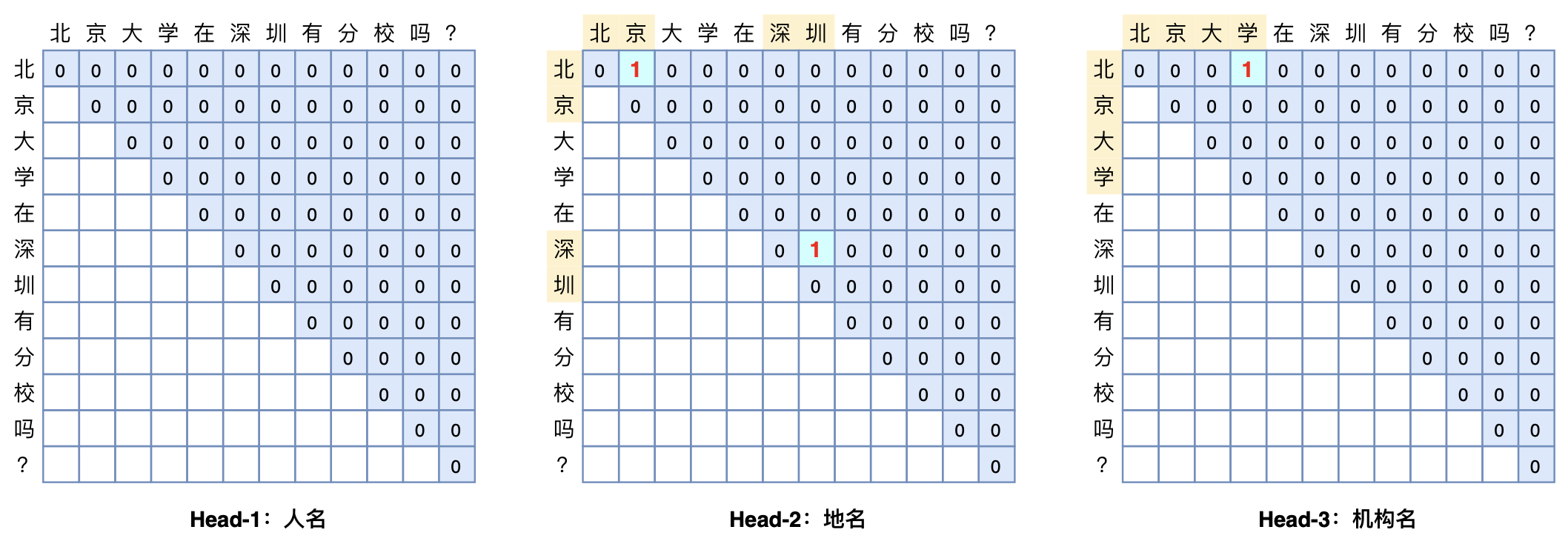
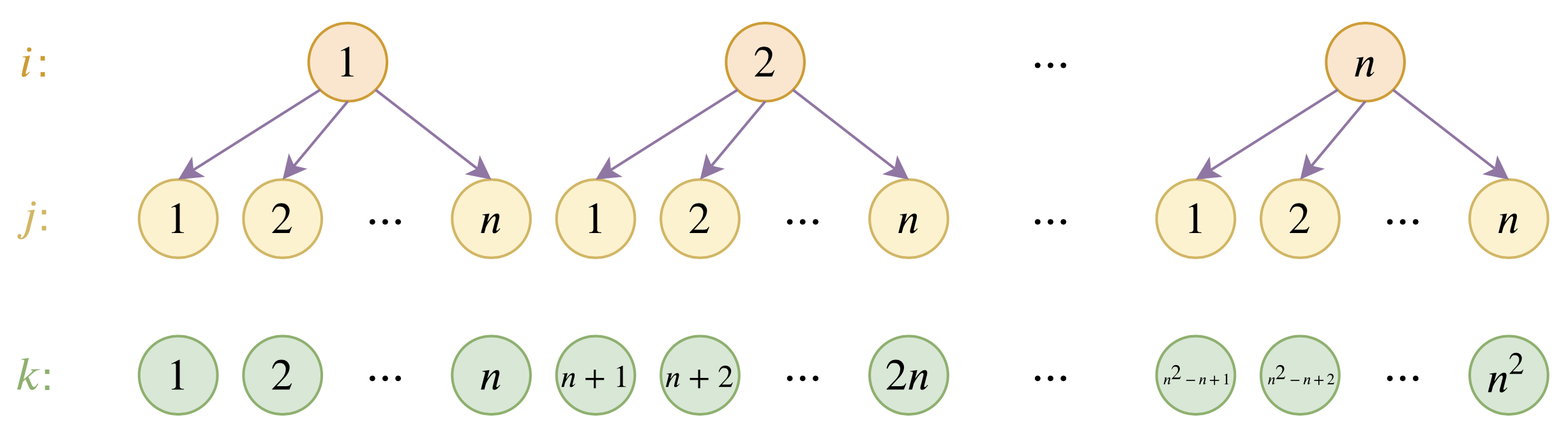
GlobalPointer多头识别嵌套实体示意图
10
May
Transformer升级之路:4、二维位置的旋转式位置编码
By 苏剑林 | 2021-05-10 | 108175位读者 | 引用在之前的文章《Transformer升级之路:2、博采众长的旋转式位置编码》中我们提出了旋转式位置编码RoPE以及对应的Transformer模型RoFormer。由于笔者主要研究的领域还是NLP,所以本来这个事情对于笔者来说已经完了。但是最近一段时间,Transformer模型在视觉领域也大火,各种Vision Transformer(ViT)层出不穷,于是就有了问题:二维情形的RoPE应该是怎样的呢?
咋看上去,这个似乎应该只是一维情形的简单推广,但其中涉及到的推导和理解却远比我们想象中复杂,本文就对此做一个分析,从而深化我们对RoPE的理解。
二维RoPE
什么是二维位置?对应的二维RoPE又是怎样的?它的难度在哪里?在这一节中,我们先简单介绍二维位置,然后直接给出二维RoPE的结果和推导思路,在随后的几节中,我们再详细给出推导过程。
17
Aug
浅谈Transformer的初始化、参数化与标准化
By 苏剑林 | 2021-08-17 | 174920位读者 | 引用前几天在训练一个新的Transformer模型的时候,发现怎么训都不收敛了。经过一番debug,发现是在做Self Attention的时候$\boldsymbol{Q}\boldsymbol{K}^{\top}$之后忘记除以$\sqrt{d}$了,于是重新温习了一下为什么除以$\sqrt{d}$如此重要的原因。当然,Google的T5确实是没有除以$\sqrt{d}$的,但它依然能够正常收敛,那是因为它在初始化策略上做了些调整,所以这个事情还跟初始化有关。
藉着这个机会,本文跟大家一起梳理一下模型的初始化、参数化和标准化等内容,相关讨论将主要以Transformer为心中展开。
采样分布
初始化自然是随机采样的的,所以这里先介绍一下常用的采样分布。一般情况下,我们都是从指定均值和方差的随机分布中进行采样来初始化。其中常用的随机分布有三个:正态分布(Normal)、均匀分布(Uniform)和截尾正态分布(Truncated Normal)。

最近评论