






22
Nov
ChildTuning:试试把Dropout加到梯度上去?
By 苏剑林 | 2021-11-22 | 67540位读者 | 引用Dropout是经典的防止过拟合的思路了,想必很多读者已经了解过它。有意思的是,最近Dropout有点“老树发新芽”的感觉,出现了一些有趣的新玩法,比如最近引起过热议的SimCSE和R-Drop,尤其是在文章《又是Dropout两次!这次它做到了有监督任务的SOTA》中,我们发现简单的R-Drop甚至能媲美对抗训练,不得不说让人意外。
一般来说,Dropout是被加在每一层的输出中,或者是加在模型参数上,这是Dropout的两个经典用法。不过,最近笔者从论文《Raise a Child in Large Language Model: Towards Effective and Generalizable Fine-tuning》中学到了一种新颖的用法:加到梯度上面。
梯度加上Dropout?相信大部分读者都是没听说过的。那么效果究竟如何呢?让我们来详细看看。
11
Dec
输入梯度惩罚与参数梯度惩罚的一个不等式
By 苏剑林 | 2021-12-11 | 23800位读者 | 引用在本博客中,已经多次讨论过梯度惩罚相关内容了。从形式上来看,梯度惩罚项分为两种,一种是关于输入的梯度惩罚$\Vert\nabla_{\boldsymbol{x}} f(\boldsymbol{x};\boldsymbol{\theta})\Vert^2$,在《对抗训练浅谈:意义、方法和思考(附Keras实现)》、《泛化性乱弹:从随机噪声、梯度惩罚到虚拟对抗训练》等文章中我们讨论过,另一种则是关于参数的梯度惩罚$\Vert\nabla_{\boldsymbol{\theta}} f(\boldsymbol{x};\boldsymbol{\theta})\Vert^2$,在《从动力学角度看优化算法(五):为什么学习率不宜过小?》、《我们真的需要把训练集的损失降低到零吗?》等文章我们讨论过。
在相关文章中,两种梯度惩罚都声称有着提高模型泛化性能的能力,那么两者有没有什么联系呢?笔者从Google最近的一篇论文《The Geometric Occam's Razor Implicit in Deep Learning》学习到了两者的一个不等式,算是部分地回答了这个问题,并且感觉以后可能用得上,在此做个笔记。
最终结果
假设有一个$l$层的MLP模型,记为
\begin{equation}\boldsymbol{h}^{(t+1)} = g^{(t)}(\boldsymbol{W}^{(t)}\boldsymbol{h}^{(t)}+\boldsymbol{b}^{(t)})\end{equation}
其中$g^{(t)}$是当前层的激活函数,$t\in\{1,2,\cdots,l\}$,并记$\boldsymbol{h}^{(1)}$为$\boldsymbol{x}$,即模型的原始输入,为了方便后面的推导,我们记$\boldsymbol{z}^{(t+1)}=\boldsymbol{W}^{(t)}\boldsymbol{h}^{(t)}+\boldsymbol{b}^{(t)}$;参数全体为$\boldsymbol{\theta}=\{\boldsymbol{W}^{(1)},\boldsymbol{b}^{(1)},\boldsymbol{W}^{(2)},\boldsymbol{b}^{(2)},\cdots,\boldsymbol{W}^{(l)},\boldsymbol{b}^{(l)}\}$。设$f$是$\boldsymbol{h}^{(l+1)}$的任意标量函数,那么成立不等式
\begin{equation}\Vert\nabla_{\boldsymbol{x}} f\Vert^2\left(\frac{1 + \Vert \boldsymbol{h}^{(1)}\Vert^2}{\Vert\boldsymbol{W}^{(1)}\Vert^2 \Vert\nabla_{\boldsymbol{x}}\boldsymbol{h}^{(1)}\Vert^2}+\cdots+\frac{1 + \Vert \boldsymbol{h}^{(l)}\Vert^2}{\Vert\boldsymbol{W}^{(l)}\Vert^2 \Vert\nabla_{\boldsymbol{x}}\boldsymbol{h}^{(l)}\Vert^2}\right)\leq \Vert\nabla_{\boldsymbol{\theta}} f\Vert^2\label{eq:f}\end{equation}
17
Dec
Seq2Seq+前缀树:检索任务新范式(以KgCLUE为例)
By 苏剑林 | 2021-12-17 | 67105位读者 | 引用两年前,在《万能的seq2seq:基于seq2seq的阅读理解问答》和《“非自回归”也不差:基于MLM的阅读理解问答》中,我们在尝试过分别利用“Seq2Seq+前缀树”和“MLM+前缀树”的方式做抽取式阅读理解任务,并获得了不错的结果。而在去年的ICLR2021上,Facebook的论文《Autoregressive Entity Retrieval》同样利用“Seq2Seq+前缀树”的组合,在实体链接和文档检索上做到了效果与效率的“双赢”。
事实上,“Seq2Seq+前缀树”的组合理论上可以用到任意检索型任务中,堪称是检索任务的“新范式”。本文将再次回顾“Seq2Seq+前缀树”的思路,并用它来实现最近推出的KgCLUE知识图谱问答榜单的一个baseline。
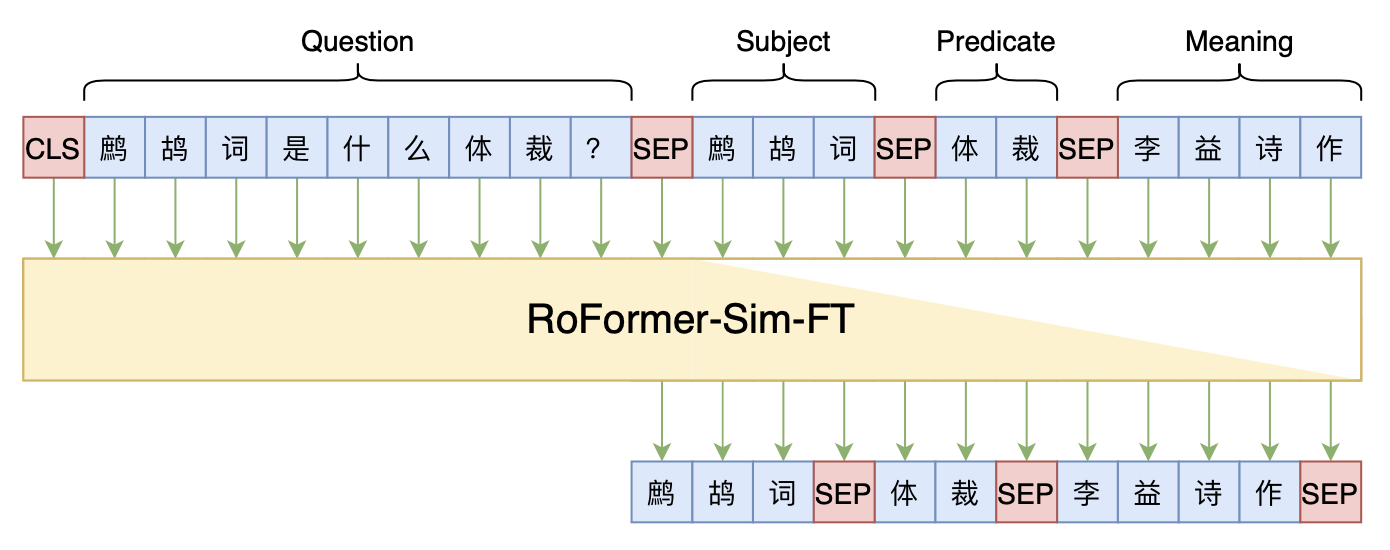
本文baseline模型示意图
6
Jan
CoSENT(一):比Sentence-BERT更有效的句向量方案
By 苏剑林 | 2022-01-06 | 234363位读者 | 引用学习句向量的方案大致上可以分为无监督和有监督两大类,其中有监督句向量比较主流的方案是Facebook提出的“InferSent”,而后的“Sentence-BERT”进一步在BERT上肯定了它的有效性。然而,不管是InferSent还是Sentence-BERT,它们在理论上依然相当令人迷惑,因为它们虽然有效,但存在训练和预测不一致的问题,而如果直接优化预测目标cos值,效果往往特别差。
最近,笔者再次思考了这个问题,经过近一周的分析和实验,大致上确定了InferSent有效以及直接优化cos值无效的原因,并提出了一个优化cos值的新方案CoSENT(Cosine Sentence)。实验显示,CoSENT在收敛速度和最终效果上普遍都比InferSent和Sentence-BERT要好。
朴素思路
本文的场景是利用文本匹配的标注数据来构建句向量模型,其中所利用到的标注数据是常见的句子对样本,即每条样本是“(句子1, 句子2, 标签)”的格式,它们又大致上可以分类“是非类型”、“NLI类型”、“打分类型”三种,参考《用开源的人工标注数据来增强RoFormer-Sim》中的“分门别类”一节。
失效的Cos
简单起见,我们可以先只考虑“是非类型”的数据,即“(句子1, 句子2, 是否相似)”的样本。假设两个句子经过编码模型后分别得到向量$u,v$,由于检索阶段计算的是余弦相似度$\cos(u,v)=\frac{\langle u,v\rangle}{\Vert u\Vert \Vert v\Vert}$,所以比较自然的想法是设计基于$\cos(u,v)$的损失函数,比如
\begin{align}t\cdot (1 - \cos(u, v)) + (1 - t) \cdot (1 + \cos(u,v))\label{eq:cos-1}\\
t\cdot (1 - \cos(u, v))^2 + (1 - t) \cdot \cos^2(u,v)\label{eq:cos-2}
\end{align}
24
Dec
概率分布的熵归一化(Entropy Normalization)
By 苏剑林 | 2021-12-24 | 49850位读者 | 引用在上一篇文章《从熵不变性看Attention的Scale操作》中,我们从熵不变性的角度推导了一个新的Attention Scale,并且实验显示具有熵不变性的新Scale确实能使得Attention的外推性能更好。这时候笔者就有一个很自然的疑问:
有没有类似L2 Normalization之类的操作,可以直接对概率分布进行变换,使得保持原始分布主要特性的同时,让它的熵为指定值?
笔者带着疑问搜索了一番,发现没有类似的研究,于是自己尝试推导了一下,算是得到了一个基本满意的结果,暂称为“熵归一化(Entropy Normalization)”,记录在此,供有需要的读者参考。
幂次变换
首先,假设$n$元分布$(p_1,p_2,\cdots,p_n)$,它的熵定义为
\begin{equation}\mathcal{H} = -\sum_i p_i \log p_i = \mathbb{E}[-\log p_i]\end{equation}
12
Jan
CoSENT(二):特征式匹配与交互式匹配有多大差距?
By 苏剑林 | 2022-01-12 | 92494位读者 | 引用一般来说,文本匹配有交互式(Interaction-based)和特征式(Representation-based)两种实现方案,其中交互式是指将两个文本拼接在一起当成单文本进行分类,而特征式则是指两个句子分别由编码器编码为句向量后再做简单的融合处理(算cos值或者接一个浅层网络)。通常的结论是,交互式由于使得两个文本能够进行充分的比较,所以它准确性通常较好,但明显的缺点是在检索场景的效率较差;而特征式则可以提前计算并缓存好句向量,所以它有着较高的效率,但由于句子间的交互程度较浅,所以通常效果不如交互式。
上一篇文章笔者介绍了CoSENT,它本质上也是一种特征式方案,并且相比以往的特征式方案效果有所提高。于是笔者的好胜心就上来了:CoSENT能比得过交互式吗?特征式相比交互式的差距有多远呢?本文就来做个比较。
自动阈值
在文章《CoSENT(一):比Sentence-BERT更有效的句向量方案》中,我们评测CoSENT所用的指标是Spearman系数,它是一个只依赖于预测结果相对顺序的指标,不依赖于阈值,比较适合检索场景的评测。但如果评测指标是accuracy或者F1这些分类指标,则必须确定一个阈值,将预测结果大于这个数的预测结果视为正、小于则为负,然后才能计算指标。在二分类的场景,我们用二分法就可以有效地确定这个阈值。
18
Jan
多任务学习漫谈(一):以损失之名
By 苏剑林 | 2022-01-18 | 157947位读者 | 引用能提升模型性能的方法有很多,多任务学习(Multi-Task Learning)也是其中一种。简单来说,多任务学习是希望将多个相关的任务共同训练,希望不同任务之间能够相互补充和促进,从而获得单任务上更好的效果(准确率、鲁棒性等)。然而,多任务学习并不是所有任务堆起来就能生效那么简单,如何平衡每个任务的训练,使得各个任务都尽量获得有益的提升,依然是值得研究的课题。
最近,笔者机缘巧合之下,也进行了一些多任务学习的尝试,借机也学习了相关内容,在此挑部分结果与大家交流和讨论。
加权求和
从损失函数的层面看,多任务学习就是有多个损失函数$\mathcal{L}_1,\mathcal{L}_2,\cdots,\mathcal{L}_n$,一般情况下它们有大量的共享参数、少量的独立参数,而我们的目标是让每个损失函数都尽可能地小。为此,我们引入权重$\alpha_1,\alpha_2,\cdots,\alpha_n\geq 0$,通过加权求和的方式将它转化为如下损失函数的单任务学习
\begin{equation}\mathcal{L} = \sum_{i=1}^n \alpha_i \mathcal{L}_i\label{eq:w-loss}\end{equation}
在这个视角下,多任务学习的主要难点就是如何确定各个$\alpha_i$了。
8
Feb
多任务学习漫谈(二):行梯度之事
By 苏剑林 | 2022-02-08 | 53669位读者 | 引用在《多任务学习漫谈(一):以损失之名》中,我们从损失函数的角度初步探讨了多任务学习问题,最终发现如果想要结果同时具有缩放不变性和平移不变性,那么用梯度的模长倒数作为任务的权重是一个比较简单的选择。我们继而分析了,该设计等价于将每个任务的梯度单独进行归一化后再相加,这意味着多任务的“战场”从损失函数转移到了梯度之上:看似在设计损失函数,实则在设计更好的梯度,所谓“以损失之名,行梯度之事”。
那么,更好的梯度有什么标准呢?如何设计出更好的梯度呢?本文我们就从梯度的视角来理解多任务学习,试图直接从设计梯度的思路出发构建多任务学习算法。
整体思路
我们知道,对于单任务学习,常用的优化方法就是梯度下降,那么它是怎么推导的呢?同样的思路能不能直接用于多任务学习呢?这便是这一节要回答的问题。

最近评论