






5
Dec
智能家居之小爱同学控制极米投影仪的简单方案
By 苏剑林 | 2022-12-05 | 33915位读者 | 引用前段时间买了一个极米投影仪,开始折腾才发现极米跟小米基本没啥关系,它根本无法跟小爱同学互动。在众多名字带“米”的品牌中,极米是为数不多的无法接入米家生态的品牌,想必有不少用户开始都会被极米这个名字误导,关键是极米投影仪还在小米商城上有得卖(捂脸)。
买都买了,还过了七天无理由,退是退不成了,只能试着折腾一下,看看能不能强行互动。
现有方案
首先网上搜了一下,网友给出的参考方案大体上有几种,一种是用“米家智能插座 + 上电自动开机”来控制开关机(事实上主要的联动就是开关机了),一种是接入Home Assistant后通过ADB控制,还有一种是修改遥控器,给遥控器加入红外模块,继而用小爱同学的红外遥控功能。
7
Dec
从局部到全局:语义相似度的测地线距离
By 苏剑林 | 2022-12-07 | 31894位读者 | 引用前段时间在最近的一篇论文《Unsupervised Opinion Summarization Using Approximate Geodesics》中学到了一个新的概念,叫做“测地线距离(Geodesic Distance)”,感觉有点意思,特来跟大家分享一下。
对笔者来说,“新”的不是测地线距离概念本身(以前学黎曼几何的时候就已经接触过了),而是语义相似度领域原来也可以巧妙地构造出测地线距离出来,并在某些场景下发挥作用。如果乐意,我们还可以说这是“流形上的语义相似度”,是不是瞬间就高级了不少?
论文梗概
首先,我们简单总结一下原论文的主要内容。顾名思义,论文的主题是摘要,通常我们的无监督摘要是这样做的:假设文章由$n$个句子$t_1,t_2,\cdots,t_n$组成,给每个句子设计打分函数$s(t_i)$(经典的是tf-idf及其变体),然后挑出打分最大的若干个句子作为摘要。当然,论文做的不是简单的摘要,而是“Opinion Summarization”,这个“Opinion”,我们可以理解为实现给定的主题或者中心$c$,摘要应该倾向于抽取出与$c$相关的句子,所以打分函数应该还应该跟$c$有关,即$s(t_i, c)$。
22
Nov
基于Amos优化器思想推导出来的一些“炼丹策略”
By 苏剑林 | 2022-11-22 | 32428位读者 | 引用如果将训练模型比喻为“炼丹”,那么“炼丹炉”显然就是优化器了。据传AdamW优化器是当前训练神经网络最快的方案,这一点笔者也没有一一对比过,具体情况如何不得而知,不过目前做预训练时多数都用AdamW或其变种LAMB倒是真的。然而,正如有了炼丹炉也未必能炼出好丹,即便我们确定了选择AdamW优化器,依然有很多问题还没有确定的答案,比如:
1、学习率如何适应不同初始化和参数化?
2、权重衰减率该怎么调?
3、学习率应该用什么变化策略?
4、能不能降低优化器的显存占用?
尽管在实际应用时,我们大多数情况下都可以直接套用前人已经调好的参数和策略,但缺乏比较系统的调参指引,始终会让我们在“炼丹”之时感觉没有底气。在这篇文章中,我们基于Google最近提出的Amos优化器的思路,给出一些参考结果。
21
Sep
生成扩散模型漫谈(十一):统一扩散模型(应用篇)
By 苏剑林 | 2022-09-21 | 45111位读者 | 引用在《生成扩散模型漫谈(十):统一扩散模型(理论篇)》中,笔者自称构建了一个统一的模型框架(Unified Diffusion Model,UDM),它允许更一般的扩散方式和数据类型。那么UDM框架究竟能否实现如期目的呢?本文通过一些具体例子来演示其一般性。
框架回顾
首先,UDM通过选择噪声分布$q(\boldsymbol{\varepsilon})$和变换$\boldsymbol{\mathcal{F}}$来构建前向过程
\begin{equation}\boldsymbol{x}_t = \boldsymbol{\mathcal{F}}_t(\boldsymbol{x}_0,\boldsymbol{\varepsilon}),\quad \boldsymbol{\varepsilon}\sim q(\boldsymbol{\varepsilon})\end{equation}
然后,通过如下的分解来实现反向过程$\boldsymbol{x}_{t-1}\sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t)$的采样
\begin{equation}\hat{\boldsymbol{x}}_0\sim p(\boldsymbol{x}_0|\boldsymbol{x}_t)\quad \& \quad \boldsymbol{x}_{t-1}\sim p(\boldsymbol{x}_{t-1}|\boldsymbol{x}_t, \boldsymbol{x}_0=\hat{\boldsymbol{x}}_0)\end{equation}
其中$p(\boldsymbol{x}_0|\boldsymbol{x}_t)$就是用$\boldsymbol{x}_t$预估$\boldsymbol{x}_0$的概率,一般用简单分布$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$来近似建模,训练目标基本上就是$-\log q(\boldsymbol{x}_0|\boldsymbol{x}_t)$或其简单变体。当$\boldsymbol{x}_0$是连续型数据时,$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$一般就取条件正态分布;当$\boldsymbol{x}_0$是离散型数据时,$q(\boldsymbol{x}_0|\boldsymbol{x}_t)$可以选择自回归模型或者非自回归模型。
25
Oct
圆内随机n点在同一个圆心角为θ的扇形的概率
By 苏剑林 | 2022-10-25 | 37983位读者 | 引用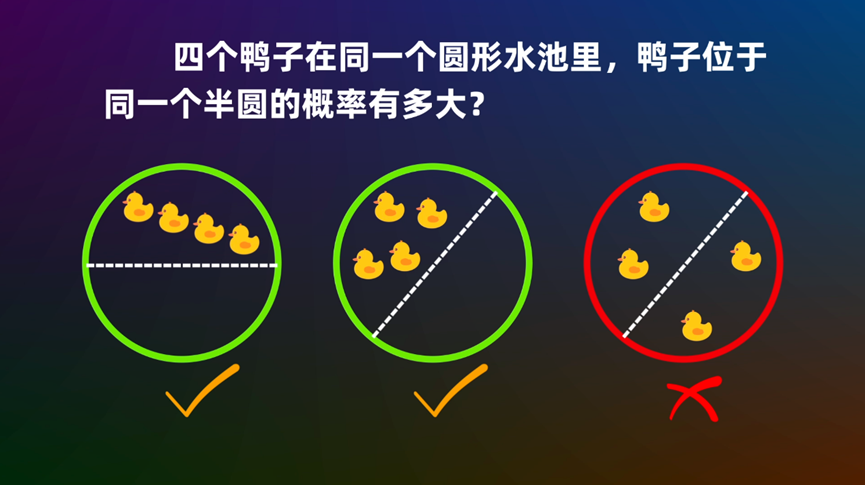
30
Nov
用热传导方程来指导自监督学习
By 苏剑林 | 2022-11-30 | 30873位读者 | 引用用理论物理来卷机器学习已经不是什么新鲜事了,比如上个月介绍的《生成扩散模型漫谈(十三):从万有引力到扩散模型》就是经典一例。最近一篇新出的论文《Self-Supervised Learning based on Heat Equation》,顾名思义,用热传导方程来做(图像领域的)自监督学习,引起了笔者的兴趣。这种物理方程如何在机器学习中发挥作用?同样的思路能否迁移到NLP中?让我们一起来读读论文。
基本方程
如下图,左边是物理中热传导方程的解,右端则是CAM、积分梯度等显著性方法得到的归因热力图,可以看到两者有一定的相似之处,于是作者认为热传导方程可以作为好的视觉特征的一个重要先验。
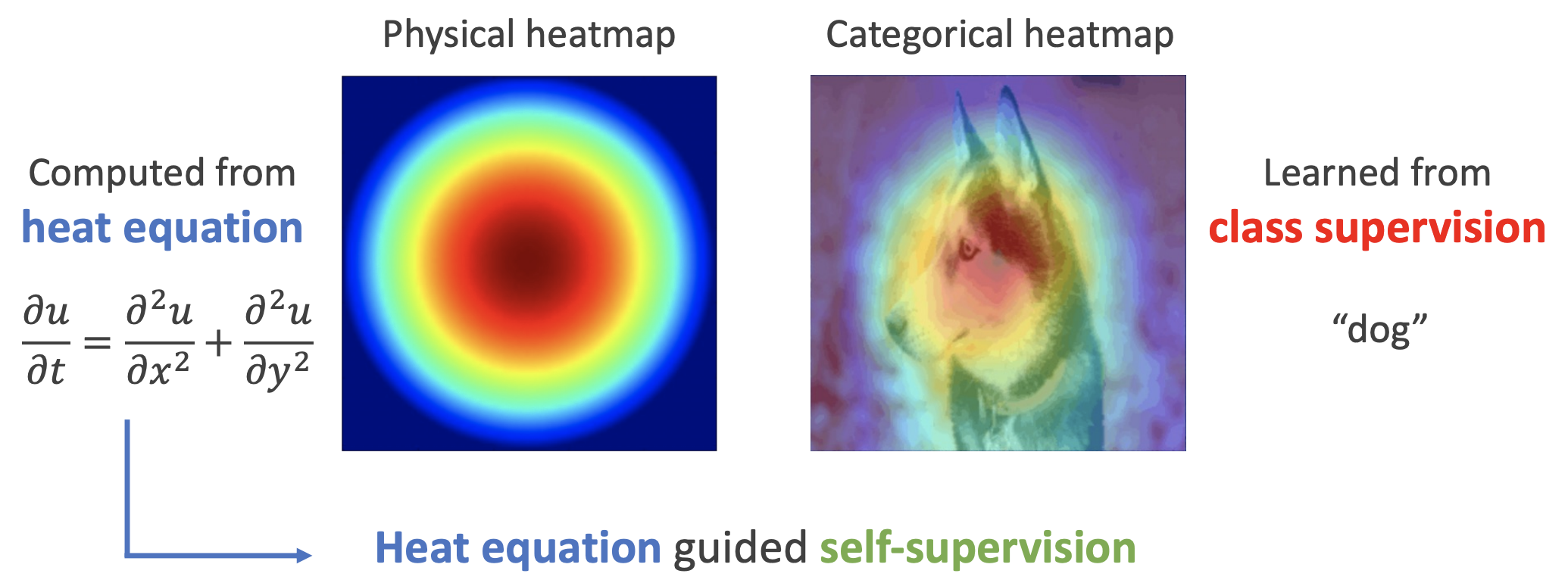
热方程的热力图(左)和视觉模型的热力图(右)
15
Dec
生成扩散模型漫谈(十四):构建ODE的一般步骤(上)
By 苏剑林 | 2022-12-15 | 57138位读者 | 引用书接上文,在《生成扩散模型漫谈(十三):从万有引力到扩散模型》中,我们介绍了一个由万有引力启发的、几何意义非常清晰的ODE式生成扩散模型。有的读者看了之后就疑问:似乎“万有引力”并不是唯一的选择,其他形式的力是否可以由同样的物理绘景构建扩散模型?另一方面,该模型在物理上确实很直观,但还欠缺从数学上证明最后确实能学习到数据分布。
本文就尝试从数学角度比较精确地回答“什么样的力场适合构建ODE式生成扩散模型”这个问题。
基础结论
要回答这个问题,需要用到在《生成扩散模型漫谈(十二):“硬刚”扩散ODE》中我们推导过的一个关于常微分方程对应的分布变化的结论。
考虑$\boldsymbol{x}_t\in\mathbb{R}^d, t\in[0,T]$的一阶(常)微分方程(组)
\begin{equation}\frac{d\boldsymbol{x}_t}{dt}=\boldsymbol{f}_t(\boldsymbol{x}_t)\label{eq:ode}\end{equation}
28
Dec
Transformer升级之路:6、旋转位置编码的完备性分析
By 苏剑林 | 2022-12-28 | 39992位读者 | 引用在去年的文章《Transformer升级之路:2、博采众长的旋转式位置编码》中,笔者提出了旋转位置编码(RoPE),当时的出发点只是觉得用绝对位置来实现相对位置是一件“很好玩的事情”,并没料到其实际效果还相当不错,并为大家所接受,不得不说这真是一个意外之喜。后来,在《Transformer升级之路:4、二维位置的旋转式位置编码》中,笔者讨论了二维形式的RoPE,并研究了用矩阵指数表示的RoPE的一般解。
既然有了一般解,那么自然就会引出一个问题:我们常用的RoPE,只是一个以二维旋转矩阵为基本单元的分块对角矩阵,如果换成一般解,理论上效果会不会更好呢?本文就来回答这个问题。
指数通解
在《Transformer升级之路:4、二维位置的旋转式位置编码》中,我们将RoPE抽象地定义为任意满足下式的方阵
\begin{equation}\boldsymbol{\mathcal{R}}_m^{\top}\boldsymbol{\mathcal{R}}_n=\boldsymbol{\mathcal{R}}_{n-m}\label{eq:re}\end{equation}

最近评论