






29
Mar
Transformer升级之路:17、多模态位置编码的简单思考
By 苏剑林 | 2024-03-29 | 37093位读者 | 引用在这个系列的第二篇文章《Transformer升级之路:2、博采众长的旋转式位置编码》中,笔者提出了旋转位置编码(RoPE)——通过绝对位置的形式实现相对位置编码的方案。一开始RoPE是针对一维序列如文本、音频等设计的(RoPE-1D),后来在《Transformer升级之路:4、二维位置的旋转式位置编码》中我们将它推广到了二维序列(RoPE-2D),这适用于图像的ViT。然而,不管是RoPE-1D还是RoPE-2D,它们的共同特点都是单一模态,即纯文本或者纯图像输入场景,那么对于多模态如图文混合输入场景,RoPE该做如何调整呢?
笔者搜了一下,发现鲜有工作讨论这个问题,主流的做法似乎都是直接展平所有输入,然后当作一维输入来应用RoPE-1D,因此连RoPE-2D都很少见。且不说这种做法会不会成为图像分辨率进一步提高时的效果瓶颈,它终究是显得不够优雅。所以,接下来我们试图探寻两者的一个自然结合。
旋转位置
RoPE名称中的“旋转”一词,来源于旋转矩阵$\boldsymbol{\mathcal{R}}_n=\begin{pmatrix}\cos n\theta & -\sin n\theta\\ \sin n\theta & \cos n\theta\end{pmatrix}$,它满足
\begin{equation}\boldsymbol{\mathcal{R}}_m^{\top}\boldsymbol{\mathcal{R}}_n=\boldsymbol{\mathcal{R}}_{n-m}\end{equation}
14
Jun
通向概率分布之路:盘点Softmax及其替代品
By 苏剑林 | 2024-06-14 | 19436位读者 | 引用不论是在基础的分类任务中,还是如今无处不在的注意力机制中,概率分布的构建都是一个关键步骤。具体来说,就是将一个$n$维的任意向量,转换为一个$n$元的离散型概率分布。众所周知,这个问题的标准答案是Softmax,它是指数归一化的形式,相对来说比较简单直观,同时也伴有很多优良性质,从而成为大部分场景下的“标配”。
尽管如此,Softmax在某些场景下也有一些不如人意之处,比如不够稀疏、无法绝对等于零等,因此很多替代品也应运而生。在这篇文章中,我们将简单总结一下Softmax的相关性质,并盘点和对比一下它的部分替代方案。
Softmax回顾
首先引入一些通用记号:$\boldsymbol{x} = (x_1,x_2,\cdots,x_n)\in\mathbb{R}^n$是需要转为概率分布的$n$维向量,它的分量可正可负,也没有限定的上下界。$\Delta^{n-1}$定义为全体$n$元离散概率分布的集合,即
\begin{equation}\Delta^{n-1} = \left\{\boldsymbol{p}=(p_1,p_2,\cdots,p_n)\left|\, p_1,p_2,\cdots,p_n\geq 0,\sum_{i=1}^n p_i = 1\right.\right\}\end{equation}
之所以标注$n-1$而不是$n$,是因为约束$\sum\limits_{i=1}^n p_i = 1$定义了$n$维空间中的一个$n-1$维子平面,再加上$p_i\geq 0$的约束,$(p_1,p_2,\cdots,p_n)$的集合就只是该平面的一个子集,即实际维度只有$n-1$。
20
Jun
重温SSM(三):HiPPO的高效计算(S4)
By 苏剑林 | 2024-06-20 | 17869位读者 | 引用前面我们用两篇文章《重温SSM(一):线性系统和HiPPO矩阵》和《重温SSM(二):HiPPO的一些遗留问题》介绍了HiPPO的思想和推导——通过正交函数基对持续更新的函数进行实时逼近,其拟合系数的动力学正好可以表示为一个线性ODE系统,并且对于特定的基底以及逼近方式,我们可以将线性系统的关键矩阵精确地算出来。此外,我们还讨论了HiPPO的离散化和相关性质等问题,这些内容奠定了后续的SSM工作的理论基础。
接下来,我们将介绍HiPPO的后续应用篇《Efficiently Modeling Long Sequences with Structured State Spaces》(简称S4),它利用HiPPO的推导结果作为序列建模的基本工具,并从新的视角探讨了高效的计算和训练方式,最后在不少长序列建模任务上验证了它的有效性,可谓SSM乃至RNN复兴的代表作之一。
基本框架
S4使用的序列建模框架,是如下的线性ODE系统:
\begin{equation}\begin{aligned}
x'(t) =&\, A x(t) + B u(t) \\
y(t) =&\, C^* x(t) + D u(t)
\end{aligned}\end{equation}
6
Sep
“闭门造车”之多模态思路浅谈(三):位置编码
By 苏剑林 | 2024-09-06 | 7790位读者 | 引用在前面的文章中,我们曾表达过这样的观点:多模态LLM相比纯文本LLM的主要差异在于,前者甚至还没有形成一个公认为标准的方法论。这里的方法论,不仅包括之前讨论的生成和训练策略,还包括一些基础架构的设计,比如本文要谈的“多模态位置编码”。
对于这个主题,我们之前在《Transformer升级之路:17、多模态位置编码的简单思考》就已经讨论过一遍,并且提出了一个方案(RoPE-Tie)。然而,当时笔者对这个问题的思考仅处于起步阶段,存在细节考虑不周全、认识不够到位等问题,所以站在现在的角度回看,当时所提的方案与完美答案还有明显的距离。
因此,本文我们将自上而下地再次梳理这个问题,并且给出一个自认为更加理想的结果。
多模位置
多模态模型居然连位置编码都没有形成共识,这一点可能会让很多读者意外,但事实上确实如此。对于文本LLM,目前主流的位置编码是RoPE(RoPE就不展开介绍了,假设读者已经熟知),更准确来说是RoPE-1D,因为原始设计只适用于1D序列。后来我们推导了RoPE-2D,这可以用于图像等2D序列,按照RoPE-2D的思路我们可以平行地推广到RoPE-3D,用于视频等3D序列。
1
Sep
Decoder-only的LLM为什么需要位置编码?
By 苏剑林 | 2024-09-01 | 8952位读者 | 引用众所周知,目前主流的LLM,都是基于Causal Attention的Decoder-only模型(对此我们在《为什么现在的LLM都是Decoder-only的架构?》也有过相关讨论),而对于Causal Attention,已经有不少工作表明它不需要额外的位置编码(简称NoPE)就可以取得非平凡的结果。然而,事实是主流的Decoder-only LLM都还是加上了额外的位置编码,比如RoPE、ALIBI等。
那么问题就来了:明明说了不加位置编码也可以,为什么主流的LLM反而都加上了呢?不是说“多一事不如少一事”吗?这篇文章我们从三个角度给出笔者的看法:
1、位置编码对于Attention的作用是什么?
2、NoPE的Causal Attention是怎么实现位置编码的?
3、NoPE实现的位置编码有什么不足?
4
Mar
我的自主招生成绩公布了
By 苏剑林 | 2012-03-04 | 37263位读者 | 引用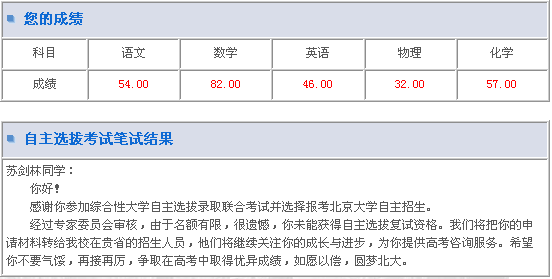
8
Jul
【个人翻译】变暖的地球对冷血动物来说过热?
By 苏剑林 | 2009-07-08 | 31252位读者 | 引用
8
Jul


最近评论