






17
Dec
Seq2Seq+前缀树:检索任务新范式(以KgCLUE为例)
By 苏剑林 | 2021-12-17 | 65274位读者 | 引用两年前,在《万能的seq2seq:基于seq2seq的阅读理解问答》和《“非自回归”也不差:基于MLM的阅读理解问答》中,我们在尝试过分别利用“Seq2Seq+前缀树”和“MLM+前缀树”的方式做抽取式阅读理解任务,并获得了不错的结果。而在去年的ICLR2021上,Facebook的论文《Autoregressive Entity Retrieval》同样利用“Seq2Seq+前缀树”的组合,在实体链接和文档检索上做到了效果与效率的“双赢”。
事实上,“Seq2Seq+前缀树”的组合理论上可以用到任意检索型任务中,堪称是检索任务的“新范式”。本文将再次回顾“Seq2Seq+前缀树”的思路,并用它来实现最近推出的KgCLUE知识图谱问答榜单的一个baseline。
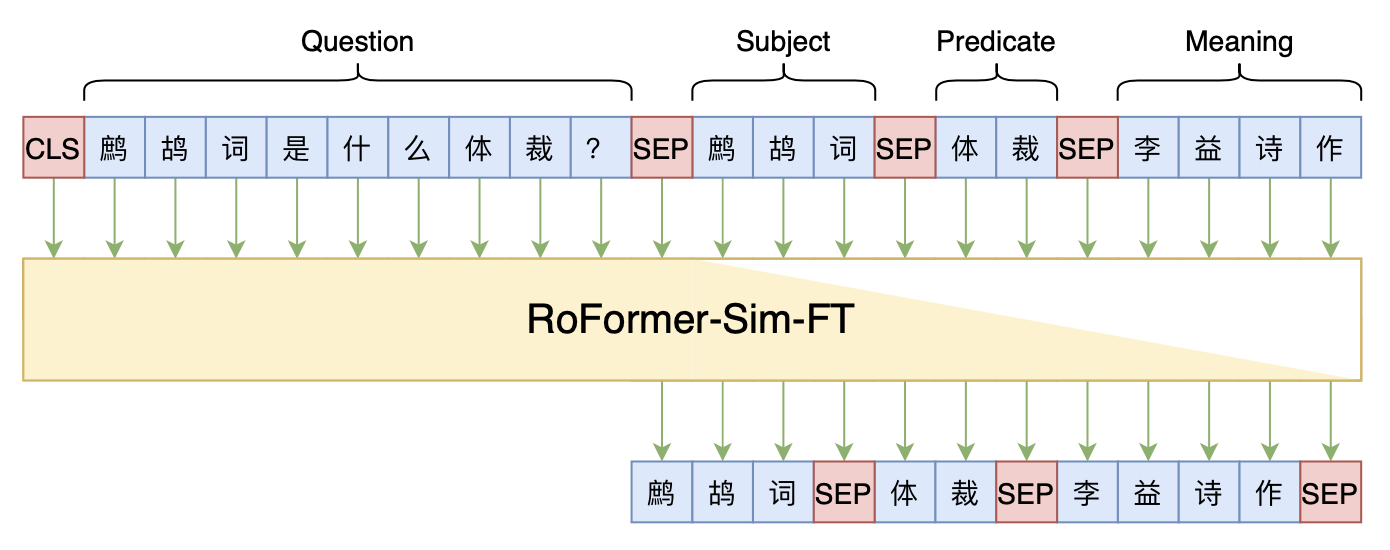
本文baseline模型示意图
6
Jan
CoSENT(一):比Sentence-BERT更有效的句向量方案
By 苏剑林 | 2022-01-06 | 220865位读者 | 引用学习句向量的方案大致上可以分为无监督和有监督两大类,其中有监督句向量比较主流的方案是Facebook提出的“InferSent”,而后的“Sentence-BERT”进一步在BERT上肯定了它的有效性。然而,不管是InferSent还是Sentence-BERT,它们在理论上依然相当令人迷惑,因为它们虽然有效,但存在训练和预测不一致的问题,而如果直接优化预测目标cos值,效果往往特别差。
最近,笔者再次思考了这个问题,经过近一周的分析和实验,大致上确定了InferSent有效以及直接优化cos值无效的原因,并提出了一个优化cos值的新方案CoSENT(Cosine Sentence)。实验显示,CoSENT在收敛速度和最终效果上普遍都比InferSent和Sentence-BERT要好。
朴素思路
本文的场景是利用文本匹配的标注数据来构建句向量模型,其中所利用到的标注数据是常见的句子对样本,即每条样本是“(句子1, 句子2, 标签)”的格式,它们又大致上可以分类“是非类型”、“NLI类型”、“打分类型”三种,参考《用开源的人工标注数据来增强RoFormer-Sim》中的“分门别类”一节。
失效的Cos
简单起见,我们可以先只考虑“是非类型”的数据,即“(句子1, 句子2, 是否相似)”的样本。假设两个句子经过编码模型后分别得到向量$u,v$,由于检索阶段计算的是余弦相似度$\cos(u,v)=\frac{\langle u,v\rangle}{\Vert u\Vert \Vert v\Vert}$,所以比较自然的想法是设计基于$\cos(u,v)$的损失函数,比如
\begin{align}t\cdot (1 - \cos(u, v)) + (1 - t) \cdot (1 + \cos(u,v))\label{eq:cos-1}\\
t\cdot (1 - \cos(u, v))^2 + (1 - t) \cdot \cos^2(u,v)\label{eq:cos-2}
\end{align}
12
Jan
CoSENT(二):特征式匹配与交互式匹配有多大差距?
By 苏剑林 | 2022-01-12 | 88394位读者 | 引用一般来说,文本匹配有交互式(Interaction-based)和特征式(Representation-based)两种实现方案,其中交互式是指将两个文本拼接在一起当成单文本进行分类,而特征式则是指两个句子分别由编码器编码为句向量后再做简单的融合处理(算cos值或者接一个浅层网络)。通常的结论是,交互式由于使得两个文本能够进行充分的比较,所以它准确性通常较好,但明显的缺点是在检索场景的效率较差;而特征式则可以提前计算并缓存好句向量,所以它有着较高的效率,但由于句子间的交互程度较浅,所以通常效果不如交互式。
上一篇文章笔者介绍了CoSENT,它本质上也是一种特征式方案,并且相比以往的特征式方案效果有所提高。于是笔者的好胜心就上来了:CoSENT能比得过交互式吗?特征式相比交互式的差距有多远呢?本文就来做个比较。
自动阈值
在文章《CoSENT(一):比Sentence-BERT更有效的句向量方案》中,我们评测CoSENT所用的指标是Spearman系数,它是一个只依赖于预测结果相对顺序的指标,不依赖于阈值,比较适合检索场景的评测。但如果评测指标是accuracy或者F1这些分类指标,则必须确定一个阈值,将预测结果大于这个数的预测结果视为正、小于则为负,然后才能计算指标。在二分类的场景,我们用二分法就可以有效地确定这个阈值。
25
Jan
Efficient GlobalPointer:少点参数,多点效果
By 苏剑林 | 2022-01-25 | 119214位读者 | 引用在《GlobalPointer:用统一的方式处理嵌套和非嵌套NER》中,我们提出了名为“GlobalPointer”的token-pair识别模块,当它用于NER时,能统一处理嵌套和非嵌套任务,并在非嵌套场景有着比CRF更快的速度和不逊色于CRF的效果。换言之,就目前的实验结果来看,至少在NER场景,我们可以放心地将CRF替换为GlobalPointer,而不用担心效果和速度上的损失。
在这篇文章中,我们提出GlobalPointer的一个改进版——Efficient GlobalPointer,它主要针对原GlobalPointer参数利用率不高的问题进行改进,明显降低了GlobalPointer的参数量。更有趣的是,多个任务的实验结果显示,参数量更少的Efficient GlobalPointer反而还取得更好的效果。
大量的参数
这里简单回顾一下GlobalPointer,详细介绍则请读者阅读《GlobalPointer:用统一的方式处理嵌套和非嵌套NER》。简单来说,GlobalPointer是基于内积的token-pair识别模块,它可以用于NER场景,因为对于NER来说我们只需要把每一类实体的“(首, 尾)”这样的token-pair识别出来就行了。
30
Jan
GPLinker:基于GlobalPointer的实体关系联合抽取
By 苏剑林 | 2022-01-30 | 117876位读者 | 引用在将近三年前的百度“2019语言与智能技术竞赛”(下称LIC2019)中,笔者提出了一个新的关系抽取模型(参考《基于DGCNN和概率图的轻量级信息抽取模型》),后被进一步发表和命名为“CasRel”,算是当时关系抽取的SOTA。然而,CasRel提出时笔者其实也是首次接触该领域,所以现在看来CasRel仍有诸多不完善之处,笔者后面也有想过要进一步完善它,但也没想到特别好的设计。
后来,笔者提出了GlobalPointer以及近日的Efficient GlobalPointer,感觉有足够的“材料”来构建新的关系抽取模型了。于是笔者从概率图思想出发,参考了CasRel之后的一些SOTA设计,最终得到了一版类似TPLinker的模型。
基础思路
关系抽取乍看之下是三元组$(s,p,o)$(即subject, predicate, object)的抽取,但落到具体实现上,它实际是“五元组”$(s_h,s_t,p,o_h,o_t)$的抽取,其中$s_h,s_t$分别是$s$的首、尾位置,而$o_h,o_t$则分别是$o$的首、尾位置。
3
Mar
指数梯度下降 + 元学习 = 自适应学习率
By 苏剑林 | 2022-03-03 | 29902位读者 | 引用前两天刷到了Google的一篇论文《Step-size Adaptation Using Exponentiated Gradient Updates》,在其中学到了一些新的概念,所以在此记录分享一下。主要的内容有两个,一是非负优化的指数梯度下降,二是基于元学习思想的学习率调整算法,两者都颇有意思,有兴趣的读者也可以了解一下。
指数梯度下降
梯度下降大家可能听说得多了,指的是对于无约束函数$\mathcal{L}(\boldsymbol{\theta})$的最小化,我们用如下格式进行更新:
\begin{equation}\boldsymbol{\theta}_{t+1} = \boldsymbol{\theta}_t - \eta\nabla_{\boldsymbol{\theta}}\mathcal{L}(\boldsymbol{\theta}_t)\end{equation}
其中$\eta$是学习率。然而很多任务并非总是无约束的,对于最简单的非负约束,我们可以改为如下格式更新:
\begin{equation}\boldsymbol{\theta}_{t+1} = \boldsymbol{\theta}_t \odot \exp\left(- \eta\nabla_{\boldsymbol{\theta}}\mathcal{L}(\boldsymbol{\theta}_t)\right)\label{eq:egd}\end{equation}
这里的$\odot$是逐位对应相乘(Hadamard积)。容易看到,只要初始化的$\boldsymbol{\theta}_0$是非负的,那么在整个更新过程中$\boldsymbol{\theta}_t$都会保持非负,这就是用于非负约束优化的“指数梯度下降”。
25
Feb
FLASH:可能是近来最有意思的高效Transformer设计
By 苏剑林 | 2022-02-25 | 176347位读者 | 引用高效Transformer,泛指所有概率Transformer效率的工作,笔者算是关注得比较早了,最早的博客可以追溯到2019年的《为节约而生:从标准Attention到稀疏Attention》,当时做这块的工作很少。后来,这类工作逐渐多了,笔者也跟进了一些,比如线性Attention、Performer、Nyströmformer,甚至自己也做了一些探索,比如之前的“Transformer升级之路”。再后来,相关工作越来越多,但大多都很无趣,所以笔者就没怎么关注了。
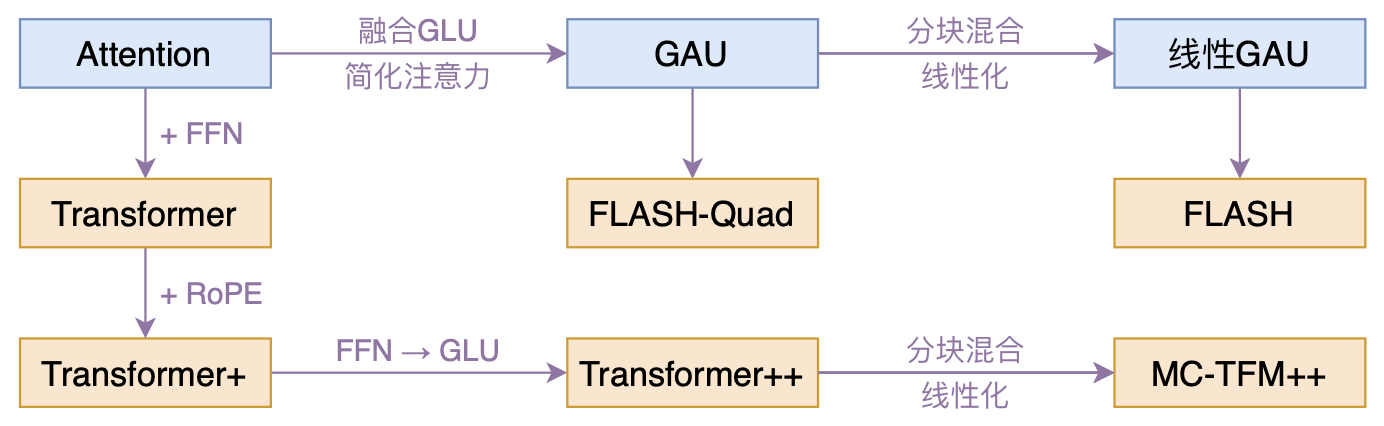
本文模型脉络图
大抵是“久旱逢甘霖”的感觉,最近终于出现了一个比较有意思的高效Transformer工作——来自Google的《Transformer Quality in Linear Time》,经过细读之后,笔者认为论文里边真算得上是“惊喜满满”了~
9
Mar
训练1000层的Transformer究竟有什么困难?
By 苏剑林 | 2022-03-09 | 75297位读者 | 引用众所周知,现在的Transformer越做越大,但这个“大”通常是“宽”而不是“深”,像GPT-3虽然参数有上千亿,但也只是一个96层的Transformer模型,与我们能想象的深度相差甚远。是什么限制了Transformer往“深”发展呢?可能有的读者认为是算力,但“宽而浅”的模型所需的算力不会比“窄而深”的模型少多少,所以算力并非主要限制,归根结底还是Transformer固有的训练困难。一般的观点是,深模型的训练困难源于梯度消失或者梯度爆炸,然而实践显示,哪怕通过各种手段改良了梯度,深模型依然不容易训练。
近来的一些工作(如Admin)指出,深模型训练的根本困难在于“增量爆炸”,即模型越深对输出的扰动就越大。上周的论文《DeepNet: Scaling Transformers to 1,000 Layers》则沿着这个思路进行尺度分析,根据分析结果调整了模型的归一化和初始化方案,最终成功训练出了1000层的Transformer模型。整个分析过程颇有参考价值,我们不妨来学习一下。
增量爆炸
原论文的完整分析比较长,而且有些假设或者描述细酌之下是不够合理的。所以在本文的分享中,笔者会尽量修正这些问题,试图以一个更合理的方式来得到类似结果。

最近评论