






6
Nov
Keras:Tensorflow的黄金标准
By 苏剑林 | 2019-11-06 | 76831位读者 | 引用这两周投入了比较多的精力去做bert4keras的开发,除了一些API的规范化工作外,其余的主要工作量是构建预训练部分的代码。在昨天,预训练代码基本构建完毕,并同时在TPU/多GPU环境下测试通过,从而有志(有算力)改进预训练模型的同学多了一个选择。——这可能是目前最为清晰易懂的bert及其预训练代码。
预训练代码链接: https://github.com/bojone/bert4keras/tree/master/pretraining
经过这两周的开发(填坑),笔者的最大感想就是:Keras已经成为了tensorflow的黄金标准了。只要你的代码按照Keras的标准规范写,那可以轻松迁移到tf.keras中去,继而可以非常轻松地在TPU或多GPU环境下训练,真正的几乎是一劳永逸。相反,如果你的写法过于灵活,包括像笔者之前介绍的很多“移花接木”式的Keras技巧,就可能会有不少问题,甚至可能出现的一种情况是:就算你已经在多GPU上跑通了,在TPU上你也死活调不通。
Keras和Tensorflow
19
Apr
从DCGAN到SELF-MOD:GAN的模型架构发展一览
By 苏剑林 | 2019-04-19 | 81488位读者 | 引用事实上,O-GAN的发现,已经达到了我对GAN的理想追求,使得我可以很惬意地跳出GAN的大坑了。所以现在我会试图探索更多更广的研究方向,比如NLP中还没做过的任务,又比如图神经网络,又或者其他有趣的东西。
不过,在此之前,我想把之前的GAN的学习结果都记录下来。
这篇文章中,我们来梳理一下GAN的架构发展情况,当然主要的是生成器的发展,判别器一直以来的变动都不大。还有,本文介绍的是GAN在图像方面的模型架构发展,跟NLP的SeqGAN没什么关系。
此外,关于GAN的基本科普,本文就不再赘述了。
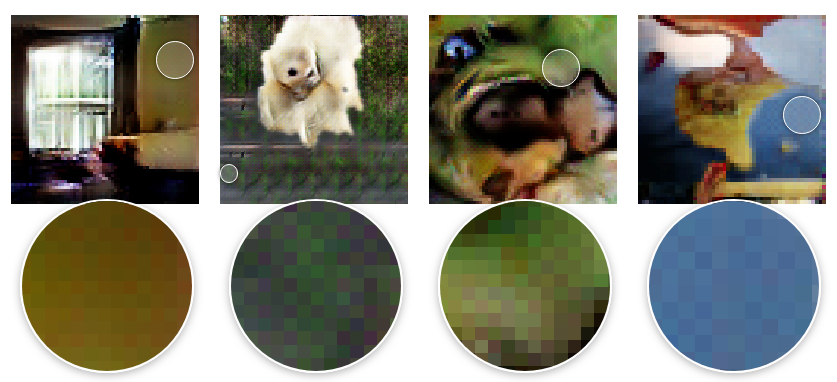
棋盘效应图示,体现为放大之后出现如国际象棋棋盘一样的交错效应。图片来自文章《Deconvolution and Checkerboard Artifacts》
25
Nov
6个派生优化器的简单介绍及其实现
By 苏剑林 | 2019-11-25 | 52626位读者 | 引用优化器可能是深度学习最“玄学”的一个模块之一了:有时候换一个优化器就能带来明显的提升,有时候别人说提升很多的优化器用到自己的任务上却一丁点用都没有,理论性质好的优化器不一定工作得很好,纯粹拍脑袋而来的优化器也未必就差了。但不管怎样,优化器终究也为热爱“深度炼丹”的同学提供了多一个选择。
近几年来,关于优化器的工作似乎也在慢慢增多,很多论文都提出了对常用优化器(尤其是Adam)的大大小小的改进。本文就汇总一些优化器工作或技巧,并统一给出了代码实现,供读者有需调用。
基本形式
所谓“派生”,就是指相关的技巧都是建立在已有的优化器上的,任意一个已有的优化器都可以用上这些技巧,从而变成一个新的优化器。
已有的优化器的基本形式为:
\begin{equation}\begin{aligned}\boldsymbol{g}_t =&\, \nabla_{\boldsymbol{\theta}} L\\
\boldsymbol{h}_t =&\, f(\boldsymbol{g}_{\leq t})\\
\boldsymbol{\theta}_{t+1} =&\, \boldsymbol{\theta}_t - \gamma \boldsymbol{h}_t
\end{aligned}\end{equation}
其中$\boldsymbol{g}_t$即梯度,而$\boldsymbol{g}_{\leq t}$指的是截止到当前步的所有梯度信息,它们经过某种运算$f$(比如累积动量、累积二阶矩校正学习率等)后得到$\boldsymbol{h}_t$,然后由$\boldsymbol{h}_t$来更新参数,这里的$\gamma$就是指学习率。
2
Apr
bert4keras在手,baseline我有:百度LIC2020
By 苏剑林 | 2020-04-02 | 94380位读者 | 引用百度的“2020语言与智能技术竞赛”开赛了,今年有五个赛道,分别是机器阅读理解、推荐任务对话、语义解析、关系抽取、事件抽取。每个赛道中,主办方都给出了基于PaddlePaddle的baseline模型,这里笔者也基于bert4keras给出其中三个赛道的个人baseline,从中我们可以看到用bert4keras搭建baseline模型的方便快捷与简练。
思路简析
这里简单分析一下这三个赛道的任务特点以及对应的baseline设计。
18
May
鱼与熊掌兼得:融合检索和生成的SimBERT模型
By 苏剑林 | 2020-05-18 | 295120位读者 | 引用前段时间我们开放了一个名为SimBERT的模型权重,它是以Google开源的BERT模型为基础,基于微软的UniLM思想设计了融检索与生成于一体的任务,来进一步微调后得到的模型,所以它同时具备相似问生成和相似句检索能力。不过当时除了放出一个权重文件和示例脚本之外,未对模型原理和训练过程做进一步说明。在这篇文章里,我们来补充这部分内容。
UniLM
UniLM是一个融合NLU和NLG能力的Transformer模型,由微软在去年5月份提出来的,今年2月份则升级到了v2版本。我们之前的文章《从语言模型到Seq2Seq:Transformer如戏,全靠Mask》就简单介绍过UniLM,并且已经集成到了bert4keras中。
UniLM的核心是通过特殊的Attention Mask来赋予模型具有Seq2Seq的能力。假如输入是“你想吃啥”,目标句子是“白切鸡”,那UNILM将这两个句子拼成一个:[CLS] 你 想 吃 啥 [SEP] 白 切 鸡 [SEP],然后接如图的Attention Mask:
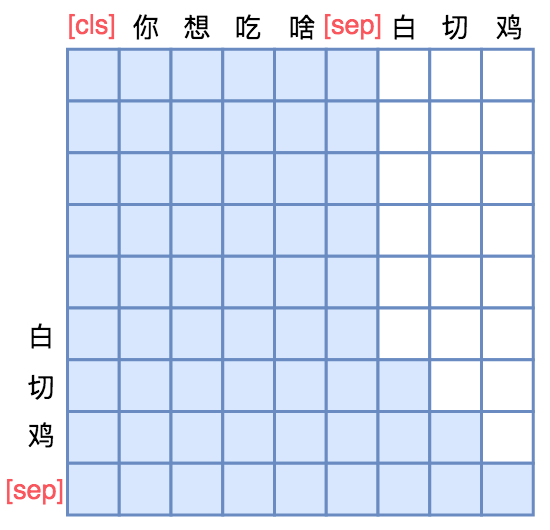
UniLM的Mask
10
Jun
无监督分词和句法分析!原来BERT还可以这样用
By 苏剑林 | 2020-06-10 | 85763位读者 | 引用BERT的一般用法就是加载其预训练权重,再接一小部分新层,然后在下游任务上进行finetune,换句话说一般的用法都是有监督训练的。基于这个流程,我们可以做中文的分词、NER甚至句法分析,这些想必大家就算没做过也会有所听闻。但如果说直接从预训练的BERT(不finetune)就可以对句子进行分词,甚至析出其句法结构出来,那应该会让人感觉到意外和有趣了。
本文介绍ACL 2020的论文《Perturbed Masking: Parameter-free Probing for Analyzing and Interpreting BERT》,里边提供了直接利用Masked Language Model(MLM)来分析和解释BERT的思路,而利用这种思路,我们可以无监督地做到分词甚至句法分析。
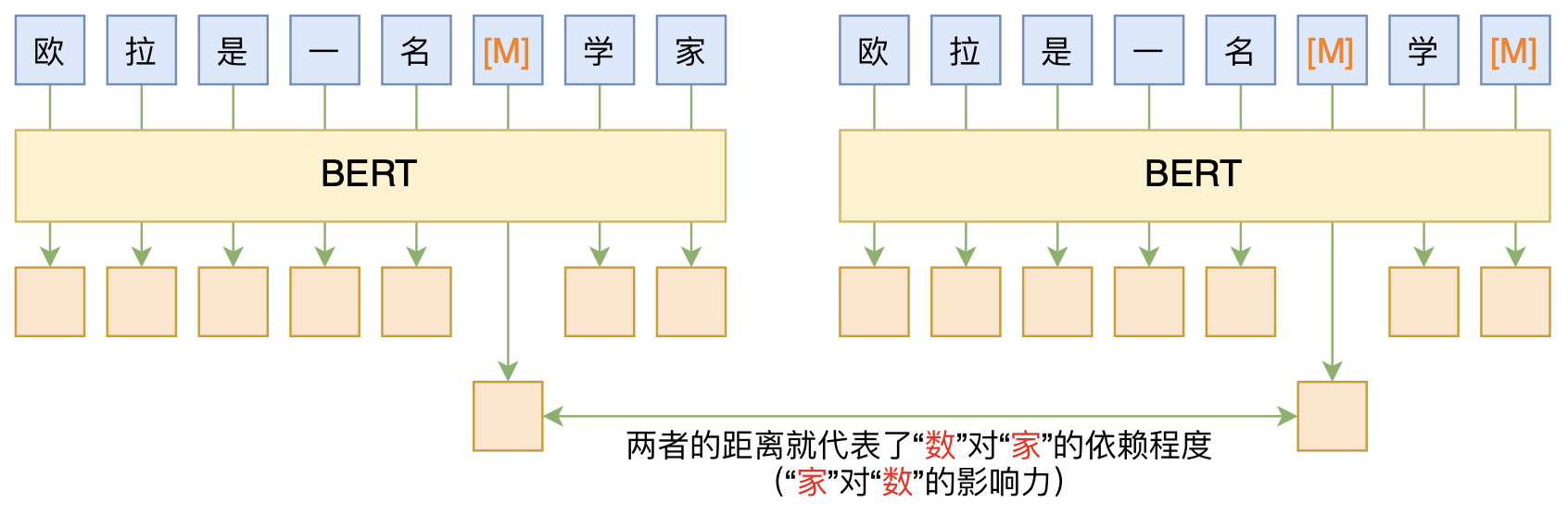
基于BERT的“token-token”相关度计算图示
27
Sep
必须要GPT3吗?不,BERT的MLM模型也能小样本学习
By 苏剑林 | 2020-09-27 | 153387位读者 | 引用大家都知道现在GPT3风头正盛,然而,到处都是GPT3、GPT3地推,读者是否记得GPT3论文的名字呢?事实上,GPT3的论文叫做《Language Models are Few-Shot Learners》,标题里边已经没有G、P、T几个单词了,只不过它跟开始的GPT是一脉相承的,因此还是以GPT称呼它。顾名思义,GPT3主打的是Few-Shot Learning,也就是小样本学习。此外,GPT3的另一个特点就是大,最大的版本多达1750亿参数,是BERT Base的一千多倍。
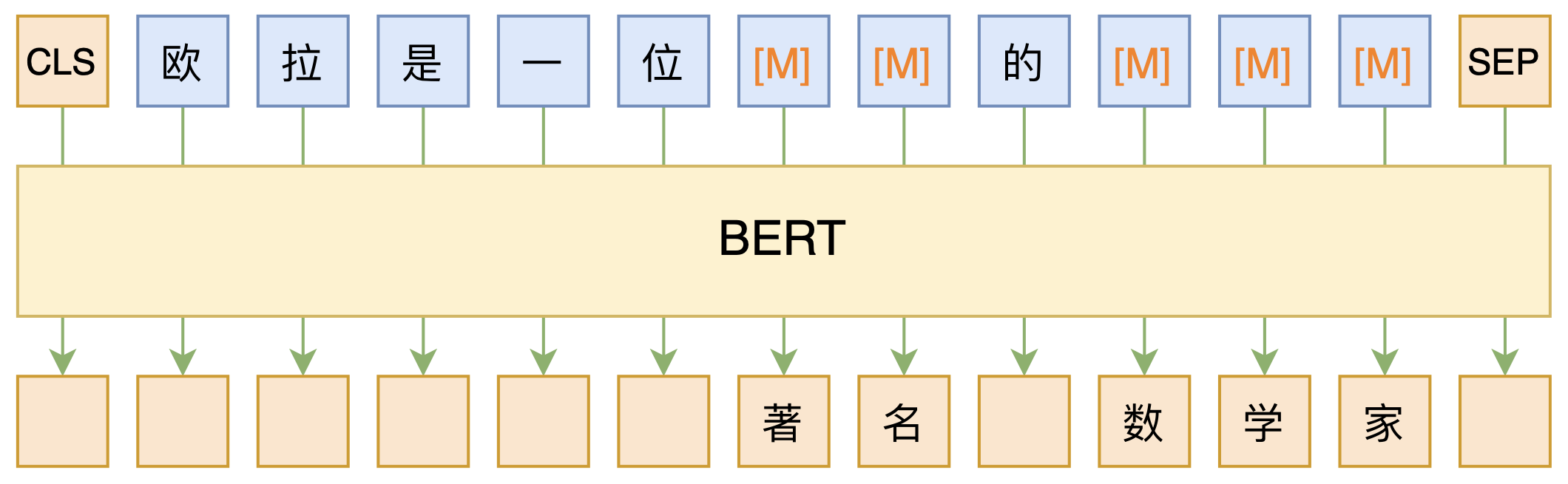
BERT的MLM模型简单示意图
正因如此,前些天Arxiv上的一篇论文《It's Not Just Size That Matters: Small Language Models Are Also Few-Shot Learners》便引起了笔者的注意,意译过来就是“谁说一定要大的?小模型也可以做小样本学习”。显然,这标题对标的就是GPT3,于是笔者饶有兴趣地点进去看看是谁这么有勇气挑战GPT3,又是怎样的小模型能挑战GPT3?经过阅读,原来作者提出通过适当的构造,用BERT的MLM模型也可以做小样本学习,看完之后颇有一种“原来还可以这样做”的恍然大悟感~在此与大家分享一下。
23
Mar
Transformer升级之路:2、博采众长的旋转式位置编码
By 苏剑林 | 2021-03-23 | 297952位读者 | 引用上一篇文章中,我们对原始的Sinusoidal位置编码做了较为详细的推导和理解,总的感觉是Sinusoidal位置编码是一种“想要成为相对位置编码的绝对位置编码”。一般来说,绝对位置编码具有实现简单、计算速度快等优点,而相对位置编码则直接地体现了相对位置信号,跟我们的直观理解吻合,实际性能往往也更好。由此可见,如果可以通过绝对位置编码的方式实现相对位置编码,那么就是“集各家之所长”、“鱼与熊掌兼得”了。Sinusoidal位置编码隐约做到了这一点,但并不够好。
本文将会介绍我们自研的Rotary Transformer(RoFormer)模型,它的主要改动是应用了笔者构思的“旋转式位置编码(Rotary Position Embedding,RoPE)”,这是一种配合Attention机制能达到“绝对位置编码的方式实现相对位置编码”的设计。而也正因为这种设计,它还是目前唯一一种可用于线性Attention的相对位置编码。

最近评论