






10
Sep
曾被嫌弃的预训练任务NSP,做出了优秀的Zero Shot效果
By 苏剑林 | 2021-09-10 | 56294位读者 | 引用在五花八门的预训练任务设计中,NSP通常认为是比较糟糕的一种,因为它难度较低,加入到预训练中并没有使下游任务微调时有明显受益,甚至RoBERTa的论文显示它会带来负面效果。所以,后续的预训练工作一般有两种选择:一是像RoBERTa一样干脆去掉NSP任务,二是像ALBERT一样想办法提高NSP的难度。也就是说,一直以来NSP都是比较“让人嫌弃”的。
不过,反转来了,NSP可能要“翻身”了。最近的一篇论文《NSP-BERT: A Prompt-based Zero-Shot Learner Through an Original Pre-training Task--Next Sentence Prediction》(下面简称NSP-BERT)显示NSP居然也可以做到非常不错的Zero Shot效果!这又是一个基于模版(Prompt)的Few/Zero Shot的经典案例,只不过这一次的主角是NSP。
背景回顾
曾经我们认为预训练纯粹就是预训练,它只是为下游任务的训练提供更好的初始化,像BERT的预训练任务有MLM(Masked Language Model和NSP(Next Sentence Prediction),在相当长的一段时间内,大家都不关心这两个预训练任务本身,而只是专注于如何通过微调来使得下游任务获得更好的性能。哪怕是T5将模型参数训练到了110亿,走的依然是“预训练+微调”这一路线。
21
Feb
GPLinker:基于GlobalPointer的事件联合抽取
By 苏剑林 | 2022-02-21 | 78701位读者 | 引用大约两年前,笔者在百度的“2020语言与智能技术竞赛”中首次接触到了事件抽取任务,并在文章《bert4keras在手,baseline我有:百度LIC2020》中分享了一个转化为BERT+CRF做NER的简单baseline。不过,当时的baseline更像是一个用来凑数的半成品,算不上一个完整的事件抽取模型。而这两年来,关系抽取的模型层见迭出,SOTA一个接一个,但事件抽取似乎没有多亮眼的设计。
最近笔者重新尝试了事件抽取任务,在之前的关系抽取模型GPLinker的基础上,结合完全子图搜索,设计一个比较简单但相对完备的事件联合抽取模型,依然称之为GPLinker,在此请大家点评一番。
任务简介
事件抽取是一个比较综合的任务。一个标准的事件抽取样本如下:
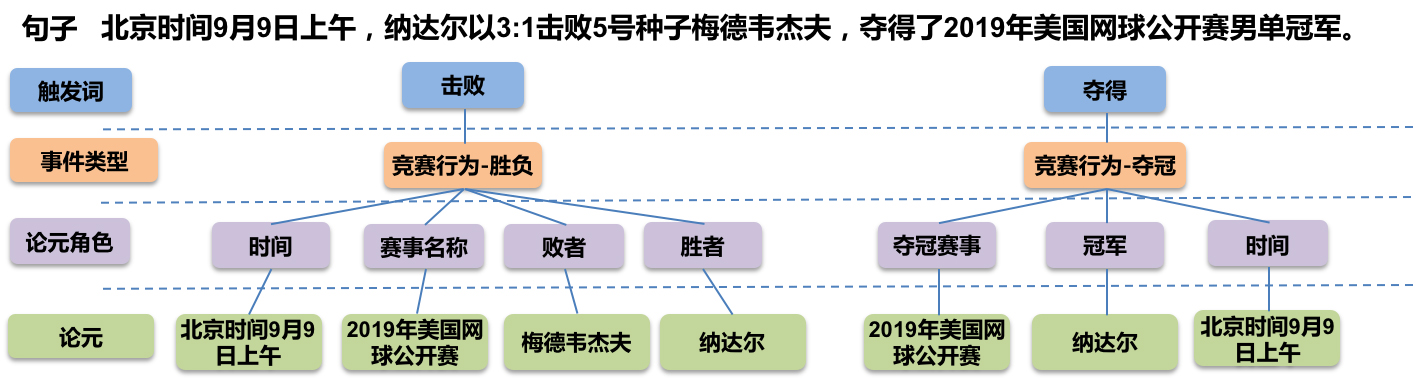
标准的事件抽取样本(图片来自百度DuEE的GitHub)
21
Mar
RoFormerV2:自然语言理解的极限探索
By 苏剑林 | 2022-03-21 | 60701位读者 | 引用大概在1年前,我们提出了旋转位置编码(RoPE),并发布了对应的预训练模型RoFormer。随着时间的推移,RoFormer非常幸运地得到了越来越多的关注和认可,比如EleutherAI新发布的60亿和200亿参数的GPT模型中就用上了RoPE位置编码,Google新提出的FLASH模型论文中则明确指出了RoPE对Transformer效果有明显的提升作用。
与此同时,我们也一直在尝试继续加强RoFormer模型,试图让RoFormer的性能“更上一层楼”。经过近半年的努力,我们自认为取得了还不错的成果,因此将其作为“RoFormerV2”正式发布:
29
Mar
为什么Pre Norm的效果不如Post Norm?
By 苏剑林 | 2022-03-29 | 100123位读者 | 引用Pre Norm与Post Norm之间的对比是一个“老生常谈”的话题了,本博客就多次讨论过这个问题,比如文章《浅谈Transformer的初始化、参数化与标准化》、《模型优化漫谈:BERT的初始标准差为什么是0.02?》等。目前比较明确的结论是:同一设置之下,Pre Norm结构往往更容易训练,但最终效果通常不如Post Norm。Pre Norm更容易训练好理解,因为它的恒等路径更突出,但为什么它效果反而没那么好呢?
笔者之前也一直没有好的答案,直到前些时间在知乎上看到 @唐翔昊 的一个回复后才“恍然大悟”,原来这个问题竟然有一个非常直观的理解!本文让我们一起来学习一下。
5
Dec
智能家居之小爱同学控制极米投影仪的简单方案
By 苏剑林 | 2022-12-05 | 34631位读者 | 引用前段时间买了一个极米投影仪,开始折腾才发现极米跟小米基本没啥关系,它根本无法跟小爱同学互动。在众多名字带“米”的品牌中,极米是为数不多的无法接入米家生态的品牌,想必有不少用户开始都会被极米这个名字误导,关键是极米投影仪还在小米商城上有得卖(捂脸)。
买都买了,还过了七天无理由,退是退不成了,只能试着折腾一下,看看能不能强行互动。
现有方案
首先网上搜了一下,网友给出的参考方案大体上有几种,一种是用“米家智能插座 + 上电自动开机”来控制开关机(事实上主要的联动就是开关机了),一种是接入Home Assistant后通过ADB控制,还有一种是修改遥控器,给遥控器加入红外模块,继而用小爱同学的红外遥控功能。
31
May
关于NBCE方法的一些补充说明和分析
By 苏剑林 | 2023-05-31 | 27056位读者 | 引用上周在《NBCE:使用朴素贝叶斯扩展LLM的Context处理长度》中,我们介绍了一种基于朴素贝叶斯来扩展LLM的Context长度的方案NBCE(Naive Bayes-based Context Extension)。由于它有着即插即用、模型无关、不用微调等优点,也获得了一些读者的认可,总的来说目前大家反馈的测试效果还算可以。
当然,部分读者在使用的时候也提出了一些问题。本文就结合读者的疑问和笔者的后续思考,对NBCE方法做一些补充说明和分析。
方法回顾
假设$T$为要生成的token序列,$S_1,S_2,\cdots,S_n$是给定的若干个Context,我们需要根据$S_1,S_2,\cdots,S_n$生成$T$,那么就需要估计$p(T|S_1, S_2,\cdots,S_n)$。根据朴素贝叶斯思想,我们得到
\begin{equation}\log p(T|S_1, S_2,\cdots,S_n) = \color{red}{(\beta + 1)\overline{\log p(T|S)}} - \color{green}{\beta\log p(T)} + \color{skyblue}{\text{常数}}\label{eq:nbce-2}\end{equation}
20
Mar
《为什么现在的LLM都是Decoder-only的架构?》FAQ
By 苏剑林 | 2023-03-20 | 52785位读者 | 引用上周笔者写了《为什么现在的LLM都是Decoder-only的架构?》,总结了一下我在这个问题上的一些实验结论和猜测。果然是热点问题流量大,paperweekly的转发没多久阅读量就破万了,知乎上点赞数也不少。在几个平台上,陆陆续续收到了读者的一些意见或者疑问,总结了其中一些有代表性的问题,做成了本篇FAQ,希望能进一步帮助大家解决疑惑。
回顾
在《为什么现在的LLM都是Decoder-only的架构?》中,笔者对GPT和UniLM两种架构做了对比实验,然后结合以往的研究经历,猜测了如下结论:
1、输入部分的注意力改为双向不会带来收益,Encoder-Decoder架构的优势很可能只是源于参数翻倍;
2、双向注意力没有带来收益,可能是因为双向注意力的低秩问题导致效果下降。
所以,基于这两点推测,我们得到结论:
在同等参数量、同等推理成本下,Decoder-only架构是最优选择。
13
Nov
【生活杂记】炒锅的尽头是铁锅
By 苏剑林 | 2023-11-13 | 57816位读者 | 引用
铁锅(网络图)
很多会下厨的同学估计都纠结过一件事情,那就是炒锅的选择。
对于炒锅的纠结,归根结底是不粘与方便的权衡。最简单的不粘锅自然是带涂层的不粘锅,如果家里的热源只有电磁炉,并且炒菜习惯比较温和,那么涂层不粘锅往往是最佳选择了。不过,一旦有了明火的燃气灶,又或者是比较喜欢爆炒,那么涂层锅可能就不是那么适合了,毕竟温度过高涂层总有脱落的风险,此时一般就考虑无涂层不粘锅。
无涂层不粘锅也有五花八门的选择,比如朴素的铁锅、带蜂窝纹的不锈钢锅、有钛锅、纯钛锅等等,价格大体上也单调递增。不过用到最后,我觉得大部分人都会回归到朴素的铁锅。

最近评论