






27
Jun
从动力学角度看优化算法(一):从SGD到动量加速
By 苏剑林 | 2018-06-27 | 225719位读者 |在这个系列中,我们来关心优化算法,而本文的主题则是SGD(stochastic gradient descent,随机梯度下降),包括带Momentum和Nesterov版本的。对于SGD,我们通常会关心的几个问题是:
SGD为什么有效?
SGD的batch size是不是越大越好?
SGD的学习率怎么调?
Momentum是怎么加速的?
Nesterov为什么又比Momentum稍好?
...
这里试图从动力学角度分析SGD,给出上述问题的一些启发性理解。
梯度下降 #
既然要比较谁好谁差,就需要知道最好是什么样的,也就是说我们的终极目标是什么?
训练目标分析 #
假设全部训练样本的集合为$\boldsymbol{S}$,损失度量为$L(\boldsymbol{x};\boldsymbol{\theta})$,其中$\boldsymbol{x}$代表单个样本,而$\boldsymbol{\theta}$则是优化参数,那么我们可以构建损失函数
$$L(\boldsymbol{\theta}) = \frac{1}{|\boldsymbol{S}|}\sum_{\boldsymbol{x}\in\boldsymbol{S}} L(\boldsymbol{x};\boldsymbol{\theta})\tag{1}$$
而训练的终极目标,则是找到$L(\boldsymbol{\theta})$的一个全局最优点(这里的最优是“最小”的意思)。
GD与ODE #
为了完成这个目标,我们可以用梯度下降法(gradient descent,GD):
$$\boldsymbol{\theta}_{n+1}=\boldsymbol{\theta}_{n} - \gamma \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_{n})\tag{2}$$
其中$\gamma > 0$称为学习率,这里刚好也是迭代的步长(后面我们会看到步长不一定等于学习率)。梯度下降有多种理解方式,由于一般都有$\gamma \ll 1$,所以这里我们将它改变为
$$\frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\gamma} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_{n})\tag{3}$$
那么左边就近似于$\boldsymbol{\theta}$的导数(假设它是时间$t$的函数),于是我们可以得到ODE动力系统:
$$\dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})\tag{4}$$
而$(2)$则是$(4)$的一个欧拉解法。这样一来,梯度下降实际上就是用欧拉解法去求解动力系统$(4)$,由于$(4)$是一个保守动力系统,因此它最终可以收敛到一个不动点(让$\dot{\boldsymbol{\theta}}=0$),并且可以证明稳定的不动点是一个极小值点(但未必是全局最小的)。
随机梯度下降 #
这里表明,随机梯度下降可以用一个随机微分方程来半定性、半定量地分析。
从GD到SGD #
$(2)$我们一般称为“全量梯度下降”,因为它需要所有样本来计算梯度,这是梯度下降的一个显著缺点:当样本成千上万时,每迭代一次需要的成本太大,甚至可能达到难以进行。于是我们想随机从$\boldsymbol{S}$中随机抽取一个子集$\boldsymbol{R}\subseteq \boldsymbol{S}$,然后只用$\boldsymbol{R}$去计算梯度并完成单次迭代。我们记
$$L_{\boldsymbol{R}}(\boldsymbol{\theta}) = \frac{1}{|\boldsymbol{R}|}\sum_{\boldsymbol{x}\in\boldsymbol{R}} L(\boldsymbol{x};\boldsymbol{\theta})\tag{5}$$
然后公式$(2)$变为
$$\boldsymbol{\theta}_{n+1}=\boldsymbol{\theta}_{n} - \gamma \nabla_{\boldsymbol{\theta}} L_{\boldsymbol{R}}(\boldsymbol{\theta}_{n})\tag{6}$$
注意$L$的最小值才是我们的目标,而$L_{\boldsymbol{R}}$则是一个随机变量,$\nabla_{\boldsymbol{\theta}} L_{\boldsymbol{R}}(\boldsymbol{\theta}_{n})$只是原来$\nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_{n})$的一个估计。这样做能不能得到合理的结果呢?
从SGD到SDE #
这里我们假设
$$\nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_{n}) - \nabla_{\boldsymbol{\theta}} L_{\boldsymbol{R}}(\boldsymbol{\theta}_{n})=\boldsymbol{\xi}_n\tag{7}$$
服从一个方差为$\sigma^2$的正态分布,注意这只是一个近似描述,主要是为了半定性、半定量分析。经过这样假设,随机梯度下降相当于在动力系统$(4)$中引入了高斯噪声:
$$\dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}) + \sigma \boldsymbol{\xi}\tag{8}$$
其中$\boldsymbol{\xi}$服从标准正态分布。原来的动力系统是一个ODE,现在变成了SDE(随机微分方程),我们称之为“朗之万方程”。当然,其实噪声的来源不仅仅是随机子集带来的估算误差,每次迭代的学习率大小也会带来噪声。
在噪声的高斯假设下,这个方程的解是怎样的呢?原来的ODE的解是一条确定的轨线,现在由于引入了一个随机噪声,因此解也是随机的,可以解得平衡状态的概率分布为
$$P(\boldsymbol{\theta}) \sim \exp \left(-\frac{L(\boldsymbol{\theta})}{\sigma^2}\right)\tag{9}$$
求解过程可以参考一般的随机动力学教程,我们只用到这个结果就好。
结果启发 #
从$(8)$式中我们可以得到一些有意义的结果。首先我们看到,原则上来说这时候的$\boldsymbol{\theta}$已经不是一个确定值,而是一个概率分布,而且原来$L(\boldsymbol{\theta})$的极小值点,刚好现在变成了$P(\boldsymbol{\theta})$的极大值点。这说明如果我们无限长地执行梯度下降的话,理论上$\boldsymbol{\theta}$能走遍所有可能的值,并且在$L(\boldsymbol{\theta})$的各个“坑”中的概率更高。
$\sigma^2$是梯度的方差,显然这个方差是取决于batch size的,根据定义$(7)$,batch size越大方差越小。而在$(9)$式中,$\sigma^2$越大,说明$P(\boldsymbol{\theta})$的图像越平缓,即越接近均匀分布,这时候$\boldsymbol{\theta}$可能就到处跑;当$\sigma^2$越小时,原来$L(\boldsymbol{\theta})$的极小值点的区域就越突出,这时候$\boldsymbol{\theta}$就可能掉进某个“坑”里不出来了。

L(θ)曲线
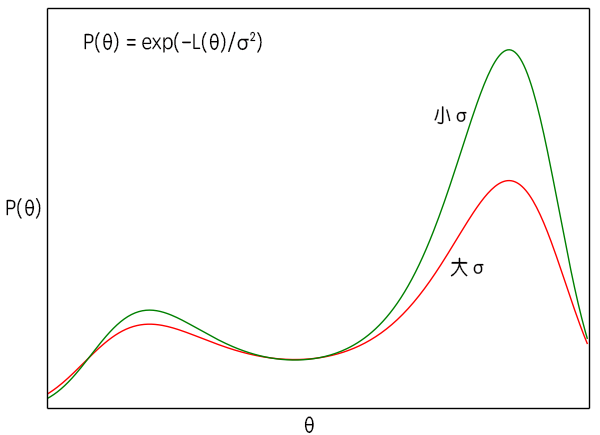
exp(-L(θ))曲线
这样分析的话,理论上来说,我们一开始要让batch size小一些,那么噪声方差$\sigma^2$就会大一些,越接近均匀分布,算法就会遍历更多的区域,随着迭代次数的增加,慢慢地就会越来越接近最优区域,这时候方差应该要下降,使得极值点更为突出。也就是说,有可能的话,batch size应该要随着迭代次数而缓慢增加。这就部分地解释了去年Google提出来的结果《学界 | 取代学习率衰减的新方法:谷歌大脑提出增加Batch Size》,不过batch size增加会大幅度增加计算成本,所以我们一般增加到一定量也就不去调整了。
当然,从图中可以看到,当进入稳定下降区域时,每次迭代的步长$\gamma$(学习率)就不应该超过“坑”的宽度,而$\sigma^2$越小,坑也就越窄,这也表明学习率应该要随着迭代次数的增加而降低。另外$\gamma$越大也部分地带来噪声,因此$\sigma^2$降低事实上也就意味着我们要降低学习率。
所以分析结果就是:
条件允许情况下,在使用SGD时,开始使用小batch size和大学习率,然后让batch size慢慢增加,学习率慢慢减小。
至于增大、减少的策略,就要靠各位的炼丹水平了。
动量加速 #
众所周知,相比Adam等自适应学习率算法,纯SGD优化是很慢的,而引入动量可以加速SGD的迭代。它也有一个漂亮的动力学解释。
从一阶到二阶 #
从前面的文字我们知道,SGD和GD在迭代格式上没有什么差别,所以要寻求SGD的加速,我们只需要寻求GD的加速,然后将全量梯度换成随机梯度就行了。而$(2)$式到$(4)$式的过程我们可以知道,GD将求$L(\boldsymbol{\theta})$的最小值问题变成了ODE方程$\dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})$的迭代求解问题。
那么,为什么一定要是一阶的呢?二阶的$\ddot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})$行不?
为此,我们考虑一般的
$$\ddot{\boldsymbol{\theta}} + \lambda \dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})\tag{10}$$
这样就真正地对应一个(牛顿)力学系统了,其中$\lambda > 0$引入了类似摩擦力的作用。我们来分析这样的系统跟原来GD的一阶ODE$(4)$与$(10)$有什么差别。
首先,从不动点的角度看,$(10)$最终收敛到的稳定不动点(让$\ddot{\boldsymbol{\theta}}=\dot{\boldsymbol{\theta}}=0$),确实也是$L(\boldsymbol{\theta})$的一个极小值点。试想一下,一个小球从山顶滚下来,会自动掉到山谷又爬升,但是由于摩擦阻力的存在,最终就停留在山谷了。注意,除非算法停不了,否则一旦算法停了,那么一定是一个山谷(也有可能是山顶、鞍点,但从概率上来讲则是比较小的),但绝对不可能是半山腰,因为半山腰的话,还存在势能,由能量守恒定律,它可以转化为动能,所以不会停下来。
因此收敛情况跟一阶的GD应该是没有差别的,所以只要比较它们俩的收敛速度。
GD+Momentum #
我们将$(10)$等价地改写为
$$\dot{\boldsymbol{\theta}}=\boldsymbol{\eta},\quad \dot{\boldsymbol{\eta}}=-\lambda \boldsymbol{\eta} - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})\tag{11}$$
我们将$\dot{\boldsymbol{\theta}}$离散化为
$$\dot{\boldsymbol{\theta}}\approx \frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\gamma}\tag{12}$$
那么$\boldsymbol{\eta}$要怎么处理呢?$\boldsymbol{\eta}_n$?不对不对,$(\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n})/\gamma$作为$n$时刻的导数只有一阶近似($\mathcal{O}(\gamma)$),而作为$n+1/2$时刻的导数则有二阶近似($\mathcal{O}(\gamma^2)$)。所以,更准确地有:
$$\frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\gamma}=\boldsymbol{\eta}_{n+1/2}\tag{13}$$
类似地,从$(11)$式的第二个式子,我们导出下面的结果,同样具有二阶近似
$$\frac{\boldsymbol{\eta}_{n+1/2}-\boldsymbol{\eta}_{n-1/2}}{\gamma}=-\lambda\left(\frac{\boldsymbol{\eta}_{n+1/2}+\boldsymbol{\eta}_{n-1/2}}{2}\right)- \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_n)\tag{14}$$
总而言之,为了追求高精度,$(\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n})/\gamma$是$\boldsymbol{\theta}$的$n+1/2$时刻的导数,$(\boldsymbol{\eta}_{n+1/2}-\boldsymbol{\eta}_{n-1/2})/\gamma$是$\boldsymbol{\eta}$的$n$时刻的导数,而$(\boldsymbol{\eta}_{n+1/2}+\boldsymbol{\eta}_{n-1/2})/2=\boldsymbol{\eta}_n$。它们都具有$\mathcal{O}(\gamma^2)$的精度。
记
$$\boldsymbol{v}_{n+1}=\gamma\boldsymbol{\eta}_{n+1/2},\quad \beta = \frac{1-\lambda\gamma/2}{1+\lambda\gamma/2},\quad \alpha = \frac{\gamma^2}{1+\lambda\gamma/2}\tag{15}$$
那么联合$(13),(14)$我们得到
$$\begin{aligned}&\boldsymbol{\theta}_{n+1} = \boldsymbol{\theta}_{n} + \boldsymbol{v}_{n+1} \\ & \boldsymbol{v}_{n+1} = \beta\boldsymbol{v}_{n} - \alpha \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta}_n) \end{aligned}\tag{16}$$
这就是带Momentum的GD算法了。在数学上,他还有一个特别的名字,叫做“蛙跳积分法”。
如何加速? #
结合$(15)$和$(16)$两个式子,我们就可以观察到Momentum是如何加速GD了。
在GD的$(2)$中,学习率是$\gamma$,步长也是$\gamma$,精度是$\mathcal{O}(\gamma)$;在Momentum中,学习率是$\alpha\approx \gamma^2$,步长是$\gamma$,精度是$\mathcal{O}(\gamma^2)=\mathcal{O}(\alpha)$。这样一来,选定学习率$\alpha$后,在同样精度下,Momentum实际上是步长$\sqrt{\alpha}$前进的,而纯GD则是以步长$\alpha$前进的。
由于学习率一般小于1,所以$\sqrt{\alpha} > \alpha$。所以
Momentum加速的原理之一就是可以在同等学习率、不损失精度的情况下,使得整个算法以更大步长前进。
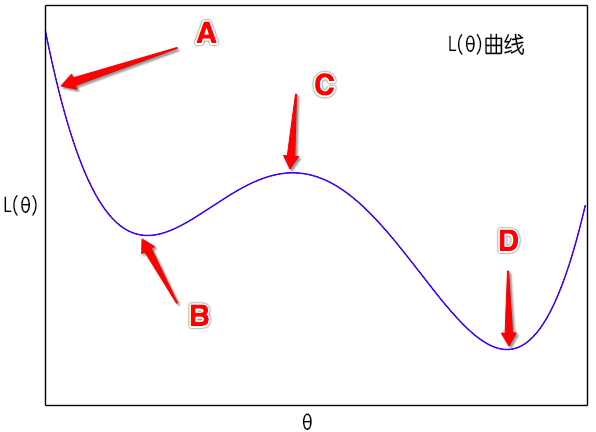
从A点出发,sgd+momentum能够到达D点,而sgd通常只能到达B点
此外,如图所示,假如从$A$点出发,那么梯度下降则会慢慢降低到$B$点来,最后停留在$C$点,当然,如果噪声、学习率比较大,那么它还有可能越过$C$点从而到达$D$点。但是有了动量加速后,这时$(10)$是一个动力学方程,牛顿力学的所有东西都可以搬到这里来。从$A$点出发,开始速度为0,然后慢慢下降,势能转化为动能,然后经过$B$点后慢慢上升,动能转化为势能,如果摩擦力比较小,那么到达$C$点后还有动能,那它就能直接到达$D$点去了。这是能量守恒保证的,哪怕没有噪声也可以。而在sgd中,要靠大学习率、小batch size(增强噪声)才能达到类似的效果。
所以,我们还可以说
Momentum加速为“越过”不那么好的极小值点提供了来自动力学的可能性。
那么$\lambda$应该要怎么选呢?直接让$\lambda=0$或$\beta=1$不成吗?
前面说到,$\lambda > 0$这一项相当于摩擦力,用来消耗能量,如果没有这一项,不管学习率多小,只要不为零,那么Momentum算法不会停留在极小值点,会一直动下去。就好比如果没有摩擦力的话,单摆就会不断摆动,不会停止,这是能量守恒决定的,能量守恒告诉我们,在能量的最低点(也就是我们期望的最小值点)时,动能是最大的,也就是速度是最快的,说白了,算法是根本停不下来~~但是如果有摩擦力消耗掉能量,能量不再守恒,那么单摆最终停留在能量的最低点。所以,引入$\lambda$对算法的收敛来说是必须的,同时从$(15)$我们有$\beta < 1$。但是,$\lambda$也不能过大,过大的摩擦力会导致运动没到达最低点就停止了,为了保证加速效果的存在,我们还有$\beta > 0$。
最后,从$(15)$式的$\beta$的定义可以看到,当固定$\lambda$时(也就是固定摩擦系数),如果学习率$\alpha$降低(意味着$\gamma$也降低),那么$\beta$应该随之升高,其中提升的比例可以进行简单的估算。由$(16)$我们得到近似$1-\lambda\sqrt{\alpha}=\beta$,从而可以反解出$\lambda$,然后代入新的$\alpha$,就可以算出新的$\beta$。。
这样我们就得到,SGD+Momentum的优化器中$\beta$的一个供参考的调参方案:
在使用SGD+Momentum时,如果降低学习率,那么应当轻微提升$\beta$。当学习率从$\alpha$降到$r\alpha$时,$\beta$可以考虑提升到$1 - (1-\beta)\sqrt{r}$。
Nesterov动量 #
Momentum算法本质上在数值求解$(10)$,而求解$(10)$并不只有$(13),(14)$这种显式的迭代格式,还有隐式的迭代。比如我们可以将$(10)$近似为
$$\begin{aligned}&\frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\gamma} = \frac{\boldsymbol{\eta}_{n+1}+\boldsymbol{\eta}_{n}}{2}\\
&\frac{\boldsymbol{\eta}_{n+1}-\boldsymbol{\eta}_{n-1}}{2\gamma} = -\lambda \frac{\boldsymbol{\eta}_{n}+\boldsymbol{\eta}_{n-1}}{2} - \nabla_{\boldsymbol{\theta}} L\left(\frac{\boldsymbol{\theta}_{n+1}+\boldsymbol{\theta}_n}{2}\right)
\end{aligned}\tag{17}$$
设
$$\boldsymbol{v}_{n+1}=\frac{\gamma}{2}(\boldsymbol{\eta}_{n+1}+\boldsymbol{\eta}_{n}),\quad \beta = 1-\lambda\gamma,\quad \alpha=\gamma^2\tag{18}$$
就得到
$$\begin{aligned}&\boldsymbol{\theta}_{n+1} = \boldsymbol{\theta}_{n} + \boldsymbol{v}_{n+1} \\ & \boldsymbol{v}_{n+1} = \beta\boldsymbol{v}_{n} - \alpha \nabla_{\boldsymbol{\theta}} L\left(\frac{\boldsymbol{\theta}_{n+1}+\boldsymbol{\theta}_n}{2}\right) \end{aligned}\tag{19}$$
这是一种隐式的迭代公式,理论上为了求$\boldsymbol{\theta}_{n+1}$我们还需要解一个非线性方程组。但近似来看,只需要将$\boldsymbol{\theta}_{n+1}$用$\boldsymbol{\theta}_{n}+\beta \boldsymbol{v}_{n}$近似,得到
$$\begin{aligned}&\boldsymbol{\theta}_{n+1} = \boldsymbol{\theta}_{n} + \boldsymbol{v}_{n+1} \\ & \boldsymbol{v}_{n+1} = \beta\boldsymbol{v}_{n} - \alpha \nabla_{\boldsymbol{\theta}} L\left(\boldsymbol{\theta}_n + \frac{\beta}{2}\boldsymbol{v}_n\right) \end{aligned}\tag{20}$$
如果将括号里边的$\beta/2$替换成$\beta$,那么就是标准的带Nesterov动量的GD算法,然而我觉得上式似乎更加合理,因为Nesterov算法想着用$\boldsymbol{\theta}_{n+1}$处的梯度代替$\boldsymbol{\theta}_n$处的梯度,以赋予算法“前瞻能力”,但事实上还是有偏了,直觉上用$(\boldsymbol{\theta}_n+\boldsymbol{\theta}_{n+1})/2$处的梯度更加“中肯”一些。
从误差分析来看,其实不管是标准的Momentum还是Nesterov版本,都是一个二阶算法,精确度相同(只是一个常数级的差别)。但理论上Nesterov是一个隐式的迭代,稳定域更广一些,所以通常能得到更好的效果。
怎么用tf等框架实现$(20)$式呢?注意$(20)$涉及到了将$L(\boldsymbol{\theta})$先对$\boldsymbol{\theta}$求导,然后将$\boldsymbol{\theta}$替换成$\boldsymbol{\theta}_n + \frac{\beta}{2}\boldsymbol{v}_n$(我这里的Nesterov)或$\boldsymbol{\theta}_n + \beta\boldsymbol{v}_n$(标准的Nesterov),这个操作在我们看来应当是很简单的,但是在tf等框架下就有点繁琐了。
因为这些框架虽然是有自动求导功能,但它们终究只是一个数值计算框架,而不是符号计算系统,所以结果只是一个数值导数。当我们求出$\boldsymbol{\theta}$的导数时,结果是一个张量,是一些确定的数,要将$\boldsymbol{\theta}$替换成$\boldsymbol{\theta}_n + \frac{\beta}{2}\boldsymbol{v}_n$就有点难办了。当然不是不可能,但终究没有Momentum版的一步到位来得简单。
于是为了便于实现,我们设(以标准的Nesterov为例):
$$\boldsymbol{\Theta}_n=\boldsymbol{\theta}_n + \beta\boldsymbol{v}_n$$
那么可以得到新的迭代公式:
$$\begin{aligned}&\boldsymbol{\Theta}_{n+1} = \boldsymbol{\Theta}_{n} + \beta\boldsymbol{v}_{n+1} - \alpha \nabla_{\boldsymbol{\theta}} L\left(\boldsymbol{\Theta}_n\right) \\ & \boldsymbol{v}_{n+1} = \beta\boldsymbol{v}_{n} - \alpha \nabla_{\boldsymbol{\theta}} L\left(\boldsymbol{\Theta}_n\right) \end{aligned}$$
这就是主流框架的Nesterov算法的实现方式,比如Keras的,这样就免除了自变量替换的过程。随着迭代越来越靠近极小值点,动量$\boldsymbol{v}$会越来越小,所以$\boldsymbol{\Theta}$和$\boldsymbol{\theta}$最终将会等价的——就算有一点误差也不打紧,因为我们用动量的根本目的是为了加速,而选择模型还是看valid集的效果。
Kramers方程 #
前面讨论的只是全量梯度下降的动量加速方法,最后简单分析一下随机梯度下降下的情形。跟前面一样的假设,引入随机梯度后,我们可以认为$(10)$变成了带随机力的方程
$$\ddot{\boldsymbol{\theta}} + \lambda \dot{\boldsymbol{\theta}} = - \nabla_{\boldsymbol{\theta}} L(\boldsymbol{\theta})+\sigma\boldsymbol{\xi}\tag{21}$$
这称为“Kramers方程”,跟朗之万方程一样,都是随机动力学里边的核心成果。当$\lambda=0$时,静态解可以写出来,这个静态分布可以作为一般情况下的参考:
$$P(\boldsymbol{\theta},\boldsymbol{\eta}) \sim \exp\left(-\frac{\boldsymbol{\eta}^2/2 + L(\boldsymbol{\theta})}{\sigma^2}\right)\tag{22}$$
其中$\boldsymbol{\eta}=\dot{\boldsymbol{\theta}}$,而$\boldsymbol{\theta}$的边缘分布就是$(9)$式,因此可以认为前面的纯SGD的分析在Momentum和Nesterov算法中同样成立。
思考回顾 #
本文希望通过动力学的方式来分析SGD的相关内容。对于文章开头提出的一些问题,本文并不能准确地给出答案,但我估计能够有点启发。尽管文章比较冗长,公式略多,但是本科学过数值计算的读者,应该都不难看懂的。如果有什么疑问,欢迎继续留言讨论~
转载到请包括本文地址:https://spaces.ac.cn/archives/5655
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Jun. 27, 2018). 《从动力学角度看优化算法(一):从SGD到动量加速 》[Blog post]. Retrieved from https://spaces.ac.cn/archives/5655
@online{kexuefm-5655,
title={从动力学角度看优化算法(一):从SGD到动量加速},
author={苏剑林},
year={2018},
month={Jun},
url={\url{https://spaces.ac.cn/archives/5655}},
}

September 5th, 2021
求问下式2到式3为什么有= 0的结论
不好意思,这个是写多了,已经修正,谢谢反馈。
September 21st, 2021
苏老师,(17)式的第二个等式怎么也推不出来,能讲讲是推导的细节吗
$$\ddot{\boldsymbol{\theta}}\approx \frac{\frac{\boldsymbol{\theta}_{n+1}-\boldsymbol{\theta}_{n}}{\gamma} - \frac{\boldsymbol{\theta}_{n}-\boldsymbol{\theta}_{n-1}}{\gamma}}{\gamma} = \frac{\boldsymbol{\eta}_{n+1}-\boldsymbol{\eta}_{n-1}}{2\gamma}$$
剩下的都是为了满足递归条件“逆推”过来的。主要是一种理解而不是严格推导。不知道你的主要疑惑在哪里呢?
January 14th, 2022
你好,有关于Momentun+gradient descent的算法证明吗?我现在在理论分析,方便分享一些理论资料吗
这个系列多数是我的发散思考以及一些延伸,并不是严格的理论结果,所以也就没有对应的文献了。
November 20th, 2023
苏神,这里的二阶动量加速下降分析方法是不是也可以用于生成扩散模型的分析?二阶动量下降一个是修改了下降的系数,得到更大下降速度,一个是修改了步长,得到更大下降步长,这个速度感觉“一部分”对应了DDIM的ODE分析,这个步长感觉好像“一部分”对应了条件生成扩散模型?用二阶的SDE,可以将其放在一个框架中?有先验条件的加速生成?
还没看完苏神关于生成扩散模型的博客,得去再看看,可能已经有了对应分析。
扩散模型用二阶ODE我倒是没思考过,二阶SDE我更是不熟悉。不大确定你说的“是不是也可以用于生成扩散模型的分析”具体是指分析啥?
我是想表达,Kramers方程的逆过程,其中的二阶偏导,会不会在求逆过程中分裂为两项,一项变成DDIM的方差项,加速生成,一项变为条件生成扩散模型的新增项,指导生成?
理解太浅,不知道思路对不对,可能错的离谱,还请苏神别见怪。
也就是Kramers方程的逆过程,感觉很像。
Kramers方程是哪个,好像没听说过(捂脸)
啊 不就是苏神你本篇文章中最后一个...
啊啊,我傻了。这充分证明我对二阶SDE是完全不熟悉,名字都忘了哈哈哈。
不过,二阶ODE本质上也可以写成一阶ODE的方程组,只不过引入了新的变量,所以引入二阶看上去等价于对数据进行升维然后再做一阶方程的演化?