






8
Jan
从动力学角度看优化算法(三):一个更整体的视角
By 苏剑林 | 2019-01-08 | 80424位读者 |最近把优化算法跟动力学结合起来思考得越来越起劲了,这是优化算法与动力学系列的第三篇,我有预感还会有第4篇,敬请期待~
简单来个剧情回顾:第一篇中我们指出了其实SGD相当于常微分方程(ODE)的数值解法:欧拉法;第二篇我们还是数值解法的误差分析的角度,分析了为什么可以通过梯度来调节学习率,因此也就解释了RMSprop、Adam等算法中,用梯度调节学习率的原理。
本文将给出一个更统一的观点来看待这两个事情,并且试图回答一个更本质的问题:为什么是梯度下降?
(注:本文的讨论没有涉及到动量加速部分。)
梯度下降再述 #
前两篇文章讨论的观点是“梯度下降相当于解ODE”,可是我们似乎还没有回答过,为什么是梯度下降?它是怎么来的?也就是说,之前我们只是在有了梯度下降之后,去解释梯度下降,还没有去面对梯度下降的起源问题。
下降最快的方向 #
基本的说法是这样的:梯度的反方向,是loss下降得最快的方向,所以要梯度下降。人们一般还会画出一个等高线图之类的示意图,来解释为什么梯度的反方向是loss下降得最快的方向。因此,很多人诟病RMSprop之类的自适应学习率优化器的原因也很简单:因为它们改变了参数下降的方向,使得优化不再是往梯度方向下降,所以效果不好。
但这样解释是不是足够合理了呢?
再描述一下问题 #
正式讨论之前,我们把问题简单定义一下:
1、我们有一个标量函数$L(\boldsymbol{\theta})\geq 0$,这里的参数$\boldsymbol{\theta}$可以是一个多元向量;
2、至少存在一个点$\boldsymbol{\theta}^*$,使得$L(\boldsymbol{\theta}^*)=0$,也就是说,$L(\boldsymbol{\theta})$的最小值就是0。
3、给定$L(\boldsymbol{\theta})$的具体形式,我们当然希望找到让$L(\boldsymbol{\theta})=0$的$\boldsymbol{\theta}$,就算不行,也希望找到一个$\boldsymbol{\theta}$让$L(\boldsymbol{\theta})$尽量小一些。
值得一提的是第2点,它其实并不是必要的,但有助于我们后面描述的一些探讨。也就是说,第2点其实只是一个假设,要知道,随便给我们一个函数,要我们求最小值的位置,但一般来说我们并不能事先知道它的最小值是多少;但是在深度学习中,这一点基本是成立的,因为我们通常会把loss设置成非负,并且得益于神经网络强大的拟合能力,loss很大程度上都能足够接近于0。
考虑loss的变化率 #
好,进入正题。假设在优化过程中参数$\boldsymbol{\theta}$按照某种轨迹$\boldsymbol{\theta}(t)$进行变化,那么$L(\boldsymbol{\theta})$也变成了$t$的函数$L(\boldsymbol{\theta}(t))$。注意这里的$t$不是真实的时间,它只是用来描述变化的参数,相当于迭代次数。
现在我们考虑$L(\boldsymbol{\theta}(t))$的变化率
\begin{equation}\frac{d}{dt}L(\boldsymbol{\theta}(t))=\left\langle\nabla_{\boldsymbol{\theta}}L,\, \dot{\boldsymbol{\theta}}\right\rangle\label{eq:ld}\end{equation}
这里$\dot{\boldsymbol{\theta}}$就是$d\boldsymbol{\theta}/dt$,$\langle\cdot\rangle$表示普通的内积。我们希望$L$越小越好,自然是希望上式右端为负数,而且绝对值越大越好。假如固定$\dot{\boldsymbol{\theta}}$的模长,那么要使得上式右端最小,根据内积的特点,$\nabla_{\boldsymbol{\theta}}L$和$\dot{\boldsymbol{\theta}}$的夹角应该要是180度,也就是
\begin{equation}\dot{\boldsymbol{\theta}} = -\lambda \nabla_{\boldsymbol{\theta}}L\quad (\lambda > 0)\label{eq:gd}\end{equation}
这也就说明了,梯度的反方向确实是loss下降最快的方向。而根据第一篇文章,上式不就是梯度下降?于是我们就很干脆地导出了梯度下降了。并且将$\eqref{eq:gd}$代入到$\eqref{eq:ld}$中,我们得到
\begin{equation}\frac{d}{dt}L(\boldsymbol{\theta}(t))=-\lambda\left\Vert\nabla_{\boldsymbol{\theta}}L\right\Vert^2\label{eq:ld-1}\end{equation}
这表明,只要学习率足够小(模拟ODE模拟到足够准确),并且$\nabla_{\boldsymbol{\theta}}L\neq \boldsymbol{0}$,那么$L$就一定会下降,直到$\nabla_{\boldsymbol{\theta}}L = 0$,这时候停留的位置,是个极小值点或者鞍点,理论上不可能是极大值点。此外,我们经常用的是随机梯度下降,mini-batch的做法会带来一定的噪声,而噪声在一定程度上能降低鞍点的概率(鞍点有可能对扰动不鲁棒),所以通常随机梯度下降效果比全量梯度下降要好些。
RMSprop再述 #
其实如果真的理解了上述推导过程,那么读者可以自己折腾出很多不同的优化算法出来。
不止有一个方向 #
比如,虽然前面已经证明了梯度的反方向是loss下降最快的方向,但凭什么就一定要往降得最快的的方向走呢?虽然梯度的反方向是堂堂正道,但也总有一些剑走偏锋的,理论上只要我保证能下降就行了,比如我可以取
\begin{equation}\dot{\boldsymbol{\theta}} = -\text{sign}\left(\nabla_{\boldsymbol{\theta}}L\right)\label{eq:rmsprop-1}\end{equation}
注意$\nabla_{\boldsymbol{\theta}}L$是一个向量,$\text{sign}\left(\nabla_{\boldsymbol{\theta}}L\right)$指的是对每一个分量取符号函数,得到一个元素是-1或0或1的向量。这样一来式$\eqref{eq:ld}$变为
\begin{equation}\frac{d}{dt}L(\boldsymbol{\theta}(t))=-\lambda\left\Vert\nabla_{\boldsymbol{\theta}}L\right\Vert_1\label{eq:ld-2}\end{equation}
其中$\Vert\boldsymbol{x}\Vert_1=\sum\limits_{i=1}^n |x_i|$表示向量的L1距离。这样选取也保证了loss在下降,理论上它收敛在$\nabla_{\boldsymbol{\theta}}L = 0$之处。
其实我们还有(假设梯度分量非零)
\begin{equation}\text{sign}\left(\nabla_{\boldsymbol{\theta}}L\right)=\frac{\nabla_{\boldsymbol{\theta}}L}{\sqrt{\nabla_{\boldsymbol{\theta}}L\otimes \nabla_{\boldsymbol{\theta}}L}}\label{eq:rmsprop-2}\end{equation}
结合$\eqref{eq:rmsprop-1}$和第二篇文章,再配合滑动平均,可以发现这一节说的就是RMSprop算法。
也就是说,自适应学习率优化器中,“学习率变成了向量,使得优化方向不再是梯度方向”根本不是什么毛病,也就不应该是自适应学习率优化器被人诟病之处。
不走捷径会怎样 #
但事实上是,真的精细调参的话,通常来说自适应学习率最终效果真的是不如SGD,说明自适应学习率优化器确实是有点毛病的。也就是说,如果你剑走偏锋,虽然一开始你走的比别人快,后期你就不如别人了。
毛病在哪呢?其实,如果是Adagrad,那问题显然是“太早停下来了”,因为它将历史梯度求和了(而不是平均),导致后期学习率太接近0了;如果是上面说的RMSprop,那么问题是——“根本停不下来”。
其实结合$\eqref{eq:rmsprop-1}$和$\eqref{eq:rmsprop-2}$我们得到
\begin{equation}\dot{\boldsymbol{\theta}} = -\frac{\nabla_{\boldsymbol{\theta}}L}{\sqrt{\nabla_{\boldsymbol{\theta}}L\otimes \nabla_{\boldsymbol{\theta}}L}}\label{eq:rmsprop-3}\end{equation}
这个算法什么时候停下来呢?实际上它不会停,因为只要梯度分量非零,那么对应的$\frac{\nabla_{\boldsymbol{\theta}}L}{\sqrt{\nabla_{\boldsymbol{\theta}}L\otimes \nabla_{\boldsymbol{\theta}}L}}$的分量也非零(不是1就是-1),从而在理论上看,这个算法并没有不动点,所以它根本不会停。为了缓解这个情况,所以RMSprop在实际使用的时候,采取了对分母滑动平均、加上epsilon(防止除零错误)这两个技巧。
但这只能算是缓解了问题,用ODE的话说就是“这个ODE并不是渐近稳定的”,所以终究会经常与局部最优点插肩而过。这才是自适应学习率算法的问题。
一点捣鼓 #
前面说了,如果真的理解过这个过程,其实自己都可以捣鼓出一些“独创的”优化算法出来,顺便还分析收敛情况。下面介绍我自己的一个捣鼓过程,还让我误以为是一个能绝对找出全局最优点的优化器~
(观看下面内容之前,请确保自己已经理解前述内容,否则可能造成误导~)
以全局最优为导向 #
这个捣鼓的出发点在于,不管是$\eqref{eq:gd}$(对应的收敛速率为$\eqref{eq:ld-1}$)还是$\eqref{eq:rmsprop-3}$(对应的收敛速率为$\eqref{eq:ld-2}$),就算它们能收敛,都只能保证$\nabla_{\boldsymbol{\theta}}L = 0$,无法保证是全局最优点(也就是不一定能做到$L(\boldsymbol{\theta})=0$)。于是一个很简单的想法是:既然我们已经知道了最小值是零,为什么不把这个信息加上去呢?
于是类比前面的思考过程,我们可以考虑:
\begin{equation}\dot{\boldsymbol{\theta}} = -\frac{\nabla_{\boldsymbol{\theta}}L}{\left\Vert\nabla_{\boldsymbol{\theta}}L\right\Vert^2}L\label{eq:me-gd}\end{equation}
这时候式$\eqref{eq:ld}$变得非常简单
\begin{equation}\frac{d}{dt}L=-L\end{equation}
这只是一个普通的线性微分方程呀,而且解是$L(t)=e^{-t}$,随着$t\to+\infty$,$L(t)\to 0$,也就是说loss一定能收敛到零。
真有这样的好事? #
当然没有~我们来看式$\eqref{eq:me-gd}$,如果跑到了一个局部最优点,满足$\nabla_{\boldsymbol{\theta}}L=\boldsymbol{0},\,L > 0$,那么式$\eqref{eq:me-gd}$的右端就是负无穷了,这在理论上没有问题,但是在数值计算上是无法实现的。开始我以为这个问题很容易解决,似乎对分母加个epsilon避开原点就行了。但进一步分析才发现,这个问题是致命性的。
为了观察原因,我们把式$\eqref{eq:me-gd}$改写为
\begin{equation}\dot{\boldsymbol{\theta}} = -\frac{\nabla_{\boldsymbol{\theta}}L}{\left\Vert\nabla_{\boldsymbol{\theta}}L\right\Vert}L\times\frac{1}{\left\Vert\nabla_{\boldsymbol{\theta}}L\right\Vert}\label{eq:me-gd-2}\end{equation}
问题就在于$1/\left\Vert\nabla_{\boldsymbol{\theta}}L\right\Vert$会变得无穷大(出现了奇点),那能不能做个截断?比如考虑
\begin{equation}\dot{\boldsymbol{\theta}} = -\frac{\nabla_{\boldsymbol{\theta}}L}{\left\Vert\nabla_{\boldsymbol{\theta}}L\right\Vert}L\times\min\left(\frac{1}{\left\Vert\nabla_{\boldsymbol{\theta}}L\right\Vert},M\right)\label{eq:me-gd-3}\end{equation}
其中$M \gg 0$是个常数,这样就绕开了奇点。这样子做倒是真的能绕开一些局部最优点,比如下面的例子:
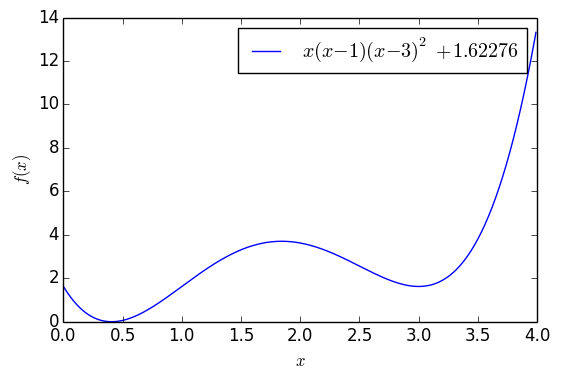
含有两个极小值点的一元函数
这个函数大约在$x=0.41$之间有一个全局最优点,函数值能取到0,但是在$x=3$的时候有一个次最优点。如果以$x_0=4$为初始值,单纯是用梯度下降的话,那么基本上都会收敛到$x=3$,但是用$\eqref{eq:me-gd-3}$,还是从$x_0=4$出发,那么经过一定振荡后,最终能收敛到$x=0.41$附近:
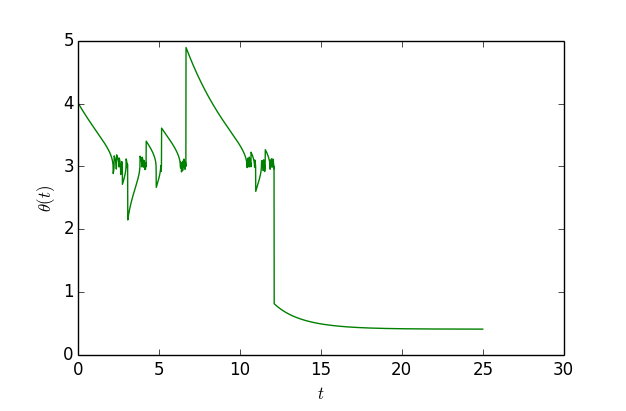
模拟“独创版”梯度下降轨迹
可以看到,开始确实会在$x=3$附近徘徊,振荡一段时间后就跳出来了,到了$x=0.41$附近。作图代码:
import numpy as np
import matplotlib.pyplot as plt
def f(x):
return x * (x - 1) * (x - 3) * (x - 3) + 1.62276
def g(x):
return -9 + 30 * x - 21 * x**2 + 4 * x**3
ts = [0]
xs = [4]
h = 0.01
H = 2500
for i in range(H):
x = xs[-1]
delta = -np.sign(g(x)) * min(abs(g(x)) / g(x)**2, 1000) * f(x)
x += delta * h
xs.append(x)
ts.append(ts[-1] + h)
print f(xs[-1])
plt.figure()
plt.clf()
plt.plot(ts, xs, 'g')
plt.legend()
plt.xlabel('$t$')
plt.ylabel('$\\theta(t)$')
plt.show()
然而,看上去很美好,实际上它没有什么价值,因为真的要保证跳出所有的局部最优点,$M$必须足够大(这样才能跟原始的$\eqref{eq:me-gd-2}$足够接近),而且迭代步数足够多。但如果真能达到这个条件,其实还不如我们自己往梯度下降中加入高斯噪声,因为在第一篇文章我们已经表明,如果假设梯度的噪声是高斯的,那么从概率上来看,总能达到全局最优点(也需要迭代步数足够多)。所以,这个看上去很漂亮的玩意,并没有什么实用价值。
(注:后来阅读得知,原来Polyak很早就已经研究过式$\eqref{eq:me-gd}$形式的学习率,搜索“Polyak step size”就可以找到很多相关工作,比如《Revisiting the Polyak step size》、《Generalized Polyak Step Size for First Order Optimization with Momentum》等。)
文章小结 #
好了,哆里哆嗦捣鼓了一阵,又水了一篇文章。个人感觉从动力学角度来分析优化算法是一件非常有趣的事情,它能让你以一种相对轻松的角度来理解优化算法的魅力,甚至能将很多方面的知识联系起来。
一般的理解优化算法的思路,是从凸优化出发,然后把凸优化的结果不严格地用到非凸情形中。我们研究凸优化,是因为“凸性”对很多理论证明都是一个有力的条件,然而深度学习几乎处处都是非凸的。既然都已经是非凸了,也就是凸优化中的证明完备的这一优点已经不存在了,我觉得倒不如从一个更轻松的角度来看这个事情。这个更轻松的角度,就是动力系统,或者说常微分方程组。
事实上,这个视角的潜力很大,包括GAN的收敛分析,以及脍炙人口的“神经ODE”,都终将落到这个视角来。当然这些都是后话了~
转载到请包括本文地址:https://spaces.ac.cn/archives/6261
更详细的转载事宜请参考:《科学空间FAQ》
如果您还有什么疑惑或建议,欢迎在下方评论区继续讨论。
如果您觉得本文还不错,欢迎分享/打赏本文。打赏并非要从中获得收益,而是希望知道科学空间获得了多少读者的真心关注。当然,如果你无视它,也不会影响你的阅读。再次表示欢迎和感谢!


如果您需要引用本文,请参考:
苏剑林. (Jan. 08, 2019). 《从动力学角度看优化算法(三):一个更整体的视角 》[Blog post]. Retrieved from https://spaces.ac.cn/archives/6261
@online{kexuefm-6261,
title={从动力学角度看优化算法(三):一个更整体的视角},
author={苏剑林},
year={2019},
month={Jan},
url={\url{https://spaces.ac.cn/archives/6261}},
}

January 8th, 2019
谢谢!
有一个小小的建议,希望您能在写文章的时候加点参考文献,这样一方面可以帮助读者去了解或者学习您之前学习的过程,另一方面即使读者在某处没看懂您的文字,或许可以去那边找一找 :)
如果我真的翻了什么参考文献,我就会写出来的。没有写说明我没有翻参考文献,怎么写...
这些东西其实就是普通的ode数值计算,很久之前就看过了,哪能写得出参考文献出来~
同学,你好。我也是一名研究生,对深度学习算法比较感兴趣,看到你写的关于GAN的博文,觉得写得很好。因为你是数学系的,想请问一下,算法方面的数学知识除了微积分、线性代数、概率论,还需要看哪些书?谢谢!
谢谢。你能搞懂这微积分、线性代数、概率论这几个,你已经完全具备高阶基础了,到那时候你就可以自己把握了。
January 24th, 2019
苏大佬的背景我看了一下,主要是数学背景。像动力学这种物理方面的,您是如何了解的呢?了解多少?觉得对深度学习的研究有哪些帮助?以及有什么推荐的书吗?
感谢!
1、所谓动力学也就只是ode方程组,本质上还是数学层面的,而非物理;
2、如果你说的“背景”指的是兴趣,那么我的兴趣很广泛,数学、物理、计算机甚至文学,我都有兴趣,也都花过一些时间去学习,所以,我不是纯粹的数学背景。
April 15th, 2019
苏神666
一口气看了很多文章,可惜这个系列的三篇文章 似乎要求数学功底。。。看的有点晕
最好苏神文章写的都不错哈哈
June 1st, 2019
您好,我公式1看不明白,这个不是复合函数求导吗,怎么会出现内积
这就是复合函数求导,出现内积是因为复合函数求导的结果就出现了内积。
June 8th, 2021
您好,请问公式(6)中的向量开方和向量除法是如何定义的?
逐位元素对应相乘或开方,比如$[a,b]\otimes[c,d]=[ac,bd]$和$\sqrt{[a,b]}=[\sqrt{a},\sqrt{b}]$。